
radar
Sigla di radio detection and ranging («rivelazione e localizzazione mediante radioonde»), che indica un sistema elettronico in grado di rivelare, per mezzo di ecoradio, la presenza di bersagli distanti, cooperanti o non cooperanti, e di misurarne distanza, posizioni angolari e velocità. Il termine r. fu adottato nei primi anni 1940 negli USA; nello stesso periodo, in Italia, si parlava di radiotelemetro.
Esistono vari tipi di r., denominati in base alle caratteristiche tecniche (r. distanziometrico, r. panoramico ecc.) o in base allo scopo (r. nautico, r. d’avvistamento o di scoperta ecc.); in particolare, si parla di r. terrestre per indicare genericamente un r., fisso o mobile, installato a terra, in contrapposizione a r. aeronautico e navale; esistono poi apparecchi, detti r. ottici, o lidar (➔), basati sullo stesso principio ma utilizzanti fasci ottici anziché fasci di microonde.
Cenni storici
Il primo brevetto di un radiolocalizzatore a distanza si deve a C. Hülsmeyer nel 1904: il segnale, da un ricetrasmettitore direzionale a scintilla, veniva riflesso da un bersaglio e tornando al ricevitore azionava un campanello. Dopo che O. Heaviside e A.E. Kennelly avevano ipotizzato, nel 1902, l’esistenza della ionosfera, iniziarono negli anni 1920 i primi tentativi di misurare l’altezza degli strati riflettenti. Trasferendo la tecnologia radio allo studio della ionosfera, mediante il metodo a onda continua modulato in frequenza e autocoerente (E. Appleton, M.S.F. Barnett) e il metodo a impulsi (G. Breit e M. Tuve), dalle prime esperienze di radiosondaggio ionosferico emerse l’idea di valersi di metodi analoghi, basati sulla riflessione di radioonde, per la radiolocalizzazione di oggetti anche a grandi distanze. Ebbero così origine in Europa e negli USA numerosi tentativi di applicare il principio delle ionosonde per la localizzazione di oggetti terrestri e per la misurazione della loro distanza dalla stazione emittente.
In Inghilterra, R.A. Watson-Watt, del Radio Department del National Physical Laboratory britannico, nel 1935 fu incaricato di esaminare i possibili metodi per scoprire o localizzare un aereo nemico e riuscì a realizzare un radiolocalizzatore a impulsi, impiegato subito dopo nel primo sistema di difesa antiaerea delle coste britanniche. Le prime indagini negli USA sulla rivelazione di aerei con sistemi radio furono condotte nello stesso periodo presso il Naval research laboratory, dove si riuscì a mettere a punto il duplexer a scaricatore a gas (1938), speciale interruttore comandato dall’impulso in arrivo, che consentì di utilizzare una sola antenna; nel 1940 venne istituito il Radiation laboratory al MIT, per lo sviluppo dei r. a microonde.
Un grande impulso alla tecnica r. fu dato dall’impiego del magnetron a cavità risonante (1940) di produzione britannica, in grado di generare impulsi a onde centimetriche, con potenze di picco e stabilità in frequenza nettamente superiori ai dispositivi usati in precedenza. Ma mentre negli USA, in Italia, in Francia e in Germania continuavano gli esperimenti, l’Inghilterra, nel 1938, aveva già sistemato impianti r. su tutte le sue maggiori navi da guerra e costituito una catena di stazioni r. per l’avvistamento di aerei, a protezione dell’estuario del Tamigi; appunto in virtù di tale preparazione l’Inghilterra conseguì importanti successi militari durante la Seconda guerra mondiale. Nel corso del conflitto, gli Angloamericani, oltre che come radiolocalizzatore di navi e di aerei, usarono estesamente il r. anche per la direzione automatica del tiro delle artiglierie navali e contraeree; inoltre, installati a bordo di aerei, i r. resero preziosi servizi per l’inseguimento e l’intercettazione degli apparecchi e dei sommergibili nemici.
Dagli anni 1950 l’applicazione r. si estese a molteplici impieghi in campo civile: nei sistemi di controllo del traffico aereo (ATC, air traffic control), nella radionavigazione, in meteorologia, nella rilevazione di mappe terrestri e in astronomia. Di notevole importanza fu, in quel periodo, sia l’introduzione di modelli teorici nella ricerca r., quali la teoria statistica della rivelazione, la ‘funzione di ambiguità’, le teorie sull’MTI (moving target indicator), sia l’impiego di nuove tecnologie come la compressione degli impulsi, il r. Doppler, il perfezionamento degli indicatori video, l’impiego e lo sviluppo del klystron amplificatore.
A partire dagli anni 1960, lo sviluppo della tecnologia elettronica e dei sistemi di elaborazione permise di utilizzare nuovi tipi di magnetron e nuove tecniche di calcolo (quali la FFT); iniziarono allora gli studi sui SAR (synthetic aperture radar). Successivamente l’impiego dell’informatica, dei microprocessori e dei sistemi di elaborazione ha permesso lo sviluppo dei r. a scansione totalmente elettronica, dei sistemi AWACS (airborne warning and control system), dei r. d’immagine per l’osservazione dei pianeti a bordo di satelliti ecc.
Caratteristiche di funzionamento
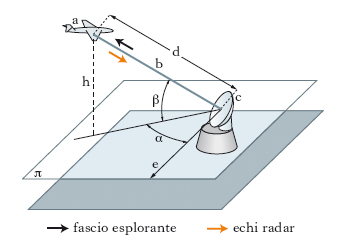
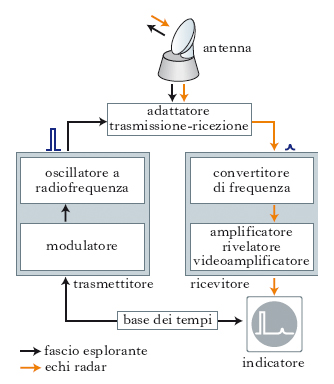
Bersaglio ed echi radar. Il principio di funzionamento del r. (fig. 1) consiste nell’irradiare verso l’oggetto ricercato (bersaglio r. o target: a in fig. 1) un fascio di radioonde, b, ottenuto mediante un’antenna direttiva orientabile, c, e nel ricevere le onde riflesse dall’oggetto (echi r.); al fine di discernere i segnali riflessi da quelli irradiati (segnali esploranti), questi ultimi sono generalmente impulsivi. Nella fig. 2 è schematizzata la struttura base di un r. di questo tipo. Un oscillatore a radiofrequenza, modulato a impulsi, invia radioimpulsi all’antenna; questa raccoglie eventuali echi e li rimanda a un radioricevitore, il cui segnale d’uscita appare sul display di uno strumento rivelatore, detto indicatore, insieme al segnale relativo all’impulso trasmesso; nel caso in cui, com’è nella fig. 2, una stessa antenna sia usata per trasmettere e ricevere (r. monostatico), un dispositivo, detto adattatore trasmissione-ricezione (TR), fa sì che l’antenna risulti adattata sia con l’oscillatore, per gli impulsi trasmessi, sia con il ricevitore per i loro echi.
Se le onde si propagano in linea retta, come con buona approssimazione accade per le onde ultracorte e per le microonde, la direzione lungo la quale si trova il bersaglio è quella individuata dall’asse del fascio esplorante, cioè quella nella quale è puntata l’antenna; tale direzione è determinata in un conveniente sistema di riferimento, per es., azimutale, come in fig. 1 (π, piano orizzontale per l’antenna; α, azimut rispetto alla retta orientata e di π; β, sito; h, quota). Se le onde sono sufficientemente corte, la distanza d del bersaglio vale, con buona approssimazione, cΔt/2, essendo c la velocità delle onde elettromagnetiche nel vuoto e Δt il ritardo d’eco, cioè l’intervallo di tempo intercorrente fra l’emissione di un radioimpulso esplorante e la ricezione dell’eco, pari al tempo impiegato dalle onde a percorrere, con velocità c, il cammino, di lunghezza 2d, dal r. al bersaglio e da questo nuovamente al r.; la misurazione del ritardo d’eco è direttamente rilevabile sull’indicatore. Così, con una determinazione geometrica (direzione dell’antenna) e con una determinazione cronometrica (ritardo d’eco), si hanno le due grandezze atte a individuare il bersaglio in un riferimento polare il cui polo cada nell’antenna dell’apparato.
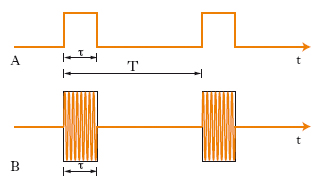
Definita (essenzialmente in base alla potenza del fascio esplorante) la massima distanza Rmax (o portata) alla quale ci si aspetta di rivelare determinati bersagli, la frequenza di ripetizione (o cadenza) fr, alla quale gli impulsi vanno trasmessi, è pari a fr=c/(2Rmax). Se è possibile ricevere echi anche da oggetti rilevanti a distanza superiore alla portata, si parla di massima portata non ambigua e di echi di seconda traccia. La durata τ dell’impulso trasmesso definisce, infine, la risoluzione, o discriminazione in distanza, Rd=cτ/2. Infatti, se due bersagli contenuti nello stesso spazio angolare definito dal diagramma di antenna sono a distanza minore di Rd, i due segnali in ricezione saranno sovrapposti e i due bersagli non saranno più distinguibili. Diminuendo τ migliora la risoluzione in distanza, ma diminuisce l’energia associata all’impulso trasmesso, la quale determina la portata. Per superare questo problema, normalmente il segnale trasmesso non ha il semplice andamento della fig. 3, corrispondente a una radiofrequenza modulata da un impulso di durata τ ma, entro τ, la radiofrequenza è modulata anche in frequenza o in fase e un opportuno processo di elaborazione (o compressione nel tempo) del segnale rivelato restituisce la risoluzione in distanza, che risulta determinata dall’inverso della larghezza di banda del segnale trasmesso e non dalla sua durata τ.
L’uso di antenne altamente direttive fa sì che gli echi siano ricevuti solo quando provengono da bersagli che giacciono nella direzione lungo la quale è puntata l’antenna. L’utilizzazione di un’antenna fortemente direttiva è inoltre vantaggiosa per incrementare, a parità di condizioni, la portata r., in quanto l’energia irradiata è concentrata in un fascio molto ristretto.
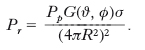
L’equazione radar. Detta Pp la potenza di picco trasmessa dal r., e definito con G(ϑ, ϕ) il guadagno in direttività dell’antenna (come rapporto fra la potenza in direzione del bersaglio, individuato dalle coordinate angolari ϑ e ϕ, e quella che si avrebbe se l’irraggiamento fosse uniforme nelle varie direzioni), la densità di potenza nella direzione del bersaglio posto a distanza R è:
Quando l’onda trasmessa investe il bersaglio, parte della sua energia viene riflessa. Il rapporto fra la potenza riflessa Pb e la densità di potenza incidente Pt(R, ϑ, ϕ) è detto area equivalente del bersaglio (o sezione d’urto) σ. La potenza Pb viene a sua volta reirradiata uniformemente in tutte le direzioni e pertanto, dov’è posto il r. (postazione r.), c’è una densità di potenza Pr pari a:
In definitiva, se l’antenna r. ha un’area efficace Ae(ϑ, ϕ), secondo la relazione
con λ lunghezza d’onda del fascio emesso, la densità di potenza totale ricevuta è:
In realtà si ipotizza che la propagazione avvenga in un dielettrico perfetto e che solo l’onda diretta contribuisca alla potenza in ricezione, cioè non si prevedono cammini multipli dal bersaglio al radar. Volendo tenere conto di questi due effetti, conviene introdurre una perdita L a denominatore della espressione relativa a Pr. Poiché nel segnale ricevuto, di densità di potenza Pr, sono inevitabilmente inclusi contributi derivanti dal rumore intrinseco del sistema e da eventuali disturbi, occorre stabilire la loro entità. Infatti, insieme all’eco di ritorno, in ricezione è presente rumore, che, se riportato in termini di potenza ricevuta in antenna, è espresso dalla relazione N=kTBF, ove k è la costante di Boltzmann, B è la larghezza di banda equivalente di rumore, F è il fattore di rumore dell’intero ricevitore e T la temperatura termodinamica di rumore. Risulta allora, per il rapporto segnale-rumore (➔ rumore) riportato all’ingresso del ricevitore,
Detto s0 il minimo rapporto Pr/N che consente un’opportuna rivelazione, si ha che la portata diviene:
Questa espressione è nota come equazione radar. Naturalmente, insieme al segnale utile in ricezione si avranno dei ritorni da oggetti non voluti, che si aggiungeranno al rumore.
Ambiente r. e possibili tecniche elaborative. Oltre al rumore intrinseco del sistema, sono da considerare limitativi per la rilevazione di un segnale r.: a) gli echi spuri (clutter), disturbi di origine ambientale (provenienti da superfici non significanti di terra e di mare) e atmosferici; b) l’effetto dovuto ai cammini multipli seguiti dagli echi, che possono provocare, per riverberazione, anche la cancellazione dell’eco utile; c) la scintillazione, fenomeno legato alla genesi strutturale dell’eco, come somma di un numero molto alto di riflettori elementari, che, in seguito a variazioni anche minime nell’assetto del bersaglio, possono provocare fluttuazioni dell’ampiezza dell’eco, della direzione di propagazione (glint) e anche della frequenza Doppler associata al moto del bersaglio; d) nel caso di r. di tipo militare, i disturbi appositamente generati dal nemico, denominati jammer (che appartengono alle ECM, le cosiddette contromisure elettroniche); e) altri disturbi accidentali, denominati angeli, possono essere causati da stormi migratori di uccelli, flottiglie di barche, auto in moto vicino a un aeroporto ecc.; f) i rumori radio di origine solare o stellare, nel caso di r. d’impiego convenzionale.
Sulla base dell’ambiente disturbato è necessario utilizzare in trasmissione opportune forme d’onda che permettano di discriminare in distanza e velocità (o frequenza) Doppler, basandosi sulla teoria delle funzioni di ambiguità ottime nei confronti dei disturbi. Il problema della separazione dei segnali d’interesse dai segnali non voluti si presenta, peraltro, particolarmente difficile. Mentre per il rumore è definibile un filtro ottimo, derivante dal massimizzare il rapporto segnale/rumore (filtro adattato), nel caso degli altri disturbi ciò non è possibile, anche perché questi, in generale, sono soggetti a modificazioni statistiche, sia temporali sia spaziali; occorre allora ricorrere a opportune tecniche di elaborazione realizzate da un apposito processore, il quale diviene così parte integrante del sistema radar. In tal caso occorre tenere conto dei vincoli a sua volta imposti dal processore al sistema. Tali tecniche, sia analogiche, sia digitali, orientano comunque la progettazione del ricevitore verso l’impiego di filtri digitali di tipo trasversale.
Per difendersi dal clutter la soluzione spesso impiegata è quella dell’indicatore di bersagli mobili (MTI) basato su una separazione spettrale che consente di distinguere le tracce utili da quelle di disturbo le quali, dopo opportuna procedura, vengono cancellate. L’MTI, nella sua struttura più semplice, confronta i singoli echi di ritorno relativi alla stessa distanza, nel corso di interrogazioni successive, usualmente operando coerentemente e valutando la presenza di una frequenza (o velocità) Doppler idonea a identificare la presenza di un bersaglio mobile, come un aereo. Comunque, le caratteristiche dei ritorni dal clutter sono, a tempi lunghi, non stazionarie; tali ritorni, in più, hanno una larghezza spettrale non nulla e pertanto il sistema MTI non può cancellare tutto il clutter, del quale rimarranno alcuni residui.
La non stazionarietà (nello spazio e nel tempo) dei disturbi suggerisce, d’altro canto, che è possibile ottenere il miglioramento delle prestazioni ottenibili utilizzando strutture adattative: in altre parole, dopo un esame dell’ambiente, si interviene a modificare i filtri di ricezione al fine di ottimizzare il loro effetto sul segnale ricevuto. Le prestazioni di un MTI e di un elaboratore adattativo sono in genere limitate anche dal numero di impulsi da elaborare (che si vorrebbe minimizzare per semplificare l’elaborazione e contenere i costi del processore), dalla variazione della rilevabilità del bersaglio in funzione della velocità radiale, oltre che da vincoli realizzativi. L’elaborazione adattativa può essere anche migliorata per mezzo di dispositivi a scansione elettronica ad agilità di fascio, che utilizzano antenne a schiera di fase (phased array), ovvero con l’uso di sistemi ad agilità di frequenza.
Un metodo alternativo all’elaborazione adattativa consiste nell’impiego di banchi di filtri Doppler, disposti in modo tale da consentire una elaborazione sequenziale dei segnali. Un esame delle uscite dei vari filtri del banco permette di individuare l’eventuale presenza di bersagli; ciò può essere ottenuto analizzando anche la loro distribuzione spaziale, che in genere è differente per i disturbi e per i bersagli. Tale approccio è stato impiegato per i r. di controllo del traffico aereo ed è indicato con il nome di MTD (moving target detector «rivelatore di bersagli mobili»). Particolari elaborazioni sono anche possibili codificando opportunamente il segnale (r. a codici) ovvero utilizzando opportune soglie decisionali in ricezione (r. autogate), che si adattano statisticamente a una zona limitata che precede e segue il bersaglio. È anche possibile minimizzare gli effetti di cammini multipli e della scintillazione, specie nei r. di inseguimento di bersagli a bassa quota.
In definitiva, tenendo presente la necessità di impiegare nei sistemi r. uno o più elaboratori, lo schema a blocchi sintetico di un r. moderno può essere quello riportato in fig. 4. Il ricevitore risulta costituito da un sistema di elaborazione dei segnali e da un calcolatore. Associati all’antenna vi sono il trasmettitore e il modulatore. L’elaboratore, sulla base delle informazioni ricevute e dei programmi predisposti allo scopo, predispone il controllo di tutto l’apparato, come, per es., la posizione dell’antenna, la scelta del tipo di segnale ecc.
Elementi costitutivi dei radar
Gli elementi fondamentali che costituiscono la struttura base di un r., come già mostrato in fig. 2, sono: antenna r., trasmettitore, ricevitore e indicatore.
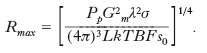
Antenne radar. Le caratteristiche di questo componente sono assai varie a seconda dello scopo. Per r. genericamente localizzatori, cioè destinati a localizzare con la maggior precisione possibile oggetti comunque situati nello spazio circostante, l’antenna tipica è a riflettore paraboloidico (fig. 5A), con la maggiore apertura possibile, al fine di realizzare fasci strettissimi, e con la possibilità di essere orientata a piacere, con comando manuale oppure automatico. Antenne del genere, con apertura da qualche metro a qualche decina di metri, sono usate nei grandi r. per la scoperta lontana, per scopi sia civili sia militari. Per i r. che debbano invece localizzare essenzialmente nel piano orizzontale, come sono quelli per la navigazione marittima, non interessa una grande risoluzione in piani verticali e l’antenna allora può ridursi a una striscia di paraboloide (antenna a paraboloide troncato: fig. 5B). Anche le antenne cilindriche a profilo parabolico (fig. 5C) e quelle a cosecante quadrata (fig. 5D) hanno un diagramma di radiazione costituito, nel caso di antenne ad asse orizzontale, da un sottile ma ampio ventaglio verticale, e sono quindi atte a rivelare in azimut aeromobili a diverse quote. Particolarmente adatta allo scopo è l’antenna a cosecante quadrata, che ha un profilo superiore, a, parabolico, e inferiore, b, circolare, il che determina un guadagno proporzionale a cosec2α, ove α è l’angolo che una direzione generica forma con l’asse c dell’antenna: nel caso di antenne con asse orizzontale, il guadagno è dunque maggiore per bersagli bassi sull’orizzonte, cioè per aerei vicini.
Della struttura dell’antenna fanno parte anche gli eventuali meccanismi o servomeccanismi per il movimento di ricerca nonché, nei r. monostatici, l’adattatore trasmissione-ricezione, costituito da tronchi di linea di trasmissione a onde stazionarie e da dispositivi di cortocircuito, il cui effetto complessivo è di cortocircuitare l’ingresso del ricevitore durante il funzionamento del trasmettitore, allo scopo di proteggere i delicati componenti del primo stadio del ricevitore e di isolare al tempo stesso il trasmettitore dell’antenna durante la fase di ricezione. Le linee di trasmissione sono costituite da guide d’onda.
Trasmettitori. Il trasmettitore di un r. può essere anche semplice, essendo spesso costituito da un oscillatore a radiofrequenza alimentato a impulsi da un circuito modulatore. L’oscillatore è un magnetron che alimenta, tramite un accoppiatore, la linea verso l’antenna. I magnetron, che furono i primi tubi usati nei trasmettitori r., sono ancora i più diffusi, sia pure migliorati grandemente rispetto ai prototipi, specialmente per quanto riguarda la potenza e la stabilità di frequenza. Peraltro la stabilità degli oscillatori a magnetron è spesso insufficiente e si è costretti a ricorrere a circuiti che garantiscono una particolare coerenza, costituiti da un oscillatore piezoelettrico, una serie di moltiplicatori di frequenza e un amplificatore di potenza; negli ultimi stadi moltiplicatori sono usati klystron oppure tubi a onda progressiva, mentre nello stadio finale è generale l’uso di klystron di potenza.
Ricevitori. Questi elementi sono sempre a supereterodina. La sensibilità è essenzialmente determinata dal guadagno dell’amplificatore a media frequenza e dal fattore di rumore complessivo (la fonte maggiore di rumore interno è costituita dal convertitore di frequenza). Nel campo delle applicazioni speciali, notevoli vantaggi si sono avuti con l’adozione di amplificatori a radiofrequenza (anteposti al convertitore) a basso fattore di rumore e con l’adozione di sistemi di rilevazione ad autocorrelazione, con cui si possono conseguire aumenti nel rapporto segnale-rumore dell’ordine di qualche decina di decibel, conseguibili altrimenti soltanto con un pari aumento della potenza in trasmissione, non sempre tecnicamente o economicamente possibile.
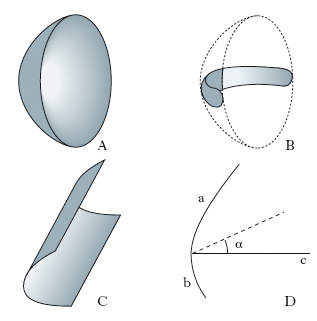
Indicatori. Sono essenzialmente costituiti da oscilloscopi digitali ai quali giungono i segnali rivelati dal ricevitore; a seconda della modalità con la quale questi sono rappresentati sull’oscilloscopio si hanno vari tipi di visualizzazione del segnale radar. Se, per es., come indicato nella fig. 6, i segnali rivelati, s, sono applicati all’asse y dell’oscilloscopio e quelli di tempo, t, sono applicati all’asse x, si ha la presentazione di tipo A, o distanziometrica, in ampiezza (la prima a essere realizzata, fig. 6A) o in intensità (fig. 6B); l’impulso emesso dà luogo a un segnale a, che si presenta a una estremità dell’asse dei tempi; gli echi danno luogo a segnali b, che si presentano, sullo stesso asse, a una distanza da a proporzionale al ritardo d’eco Δt misurato secondo le marche distanziometriche c.
Altra variante di questa presentazione è quella di tipo J, in cui l’asse delle distanze è circolare, alla periferia dello schermo (fig. 6C). In questo tipo di visualizzazione del segnale r., di cui esistono diverse varianti, l’antenna, del tipo a fascio conico molto stretto, è orientata, in azimut e in elevazione, da meccanismi cui sono associati strumenti per la misurazione dell’azimut α e del sito β del bersaglio. Una di queste coordinate può essere letta dall’oscilloscopio, insieme alla distanza, adottando un diverso tipo di ricerca per l’antenna, detto ricerca circolare, e di presentazione per l’indicatore, detto presentazione di tipo B o a due coordinate. Precisamente, l’antenna del tipo con il fascio a ventaglio verticale può ruotare intorno a un asse verticale; al moto di rotazione dell’antenna è asservito un moto verticale uniforme dell’asse delle distanze sul display dell’indicatore; i segnali, applicati all’asse z, si trovano quindi iscritti in un sistema di riferimento con asse delle distanze, d, radiale e asse degli azimut, α, ortogonali tra loro (fig. 6D); oppure il sistema di deflessione è asservito al meccanismo d’antenna in modo che il raggio anzidetto ruoti in sincronismo con l’antenna; gli impulsi emessi danno luogo (fig. 6E) a un punto luminoso nel centro dello schermo e le marche di distanza danno luogo a cerchi distanziometrici, c; gli echi, b, sono così riferiti a un sistema polare piano, con il polo nel centro dello schermo. Se l’antenna ruota continuamente e uniformemente, si ha la presentazione panoramica, o PPI (plane position indication); essa è detta anche presentazione topografica in quanto gli oggetti a portata del r. appaiono sullo schermo dell’indicatore come apparirebbero in una carta topografica in proiezione centrale con il centro di proiezione nell’antenna del radar. Questo tipo di presentazione è quella che meglio si presta agli scopi della navigazione marittima.
Ricorrendo a particolari accorgimenti, è possibile ottenere vari tipi di presentazione, detti di tipo C o a tre coordinate, mediante i quali si determina, oltre che l’azimut e l’elevazione, anche la quota del bersaglio (r. tridimensionali, o volumetrici, usati in campo civile per la sorveglianza del traffico aereo).
Tipi di radar
R. ad apertura sintetica. Il tipo di r. SAR (synthetic aperture radar), usato sia in campo civile sia militare, è impiegato nell’osservazione del suolo terrestre da un aeromobile, che può essere un aereo, un veicolo spaziale o un satellite artificiale. Il SAR è stato anche usato per l’osservazione del pianeta Venere. Rispetto a un r. convenzionale, il SAR ha la rilevante proprietà di avere un’alta risoluzione, oltre che in distanza, anche in angolo, al di là di quella consentita dalle dimensioni dell’antenna. Questa proprietà è dovuta alla particolare tecnica di elaborazione coerente dei singoli ritorni degli elementi del terreno osservati, che, per il movimento del veicolo, compaiono nel tempo sotto angolazioni diverse, formando tutta un’evoluzione Doppler (detta storia Doppler). L’elaborazione può essere realizzata a bordo, ma spesso, specie nelle applicazioni spaziali, viene eseguita a terra, a causa della rilevante quantità di dati e di elaborazioni necessarie. Il SAR può essere considerato un particolare r. di immagine e viene impiegato usualmente nel telerilevamento della Terra, cioè nella raccolta dei dati di tipo geologico, geofisico e geomorfologico, nella sorveglianza dello spazio, nella navigazione aerea e nella guida missili. La caratteristica principale di un SAR è quella di fornire un’immagine del terreno di rilevanti dimensioni, con una notevole qualità (confrontabile con quella di una fotografia) di notte e di giorno e in ogni condizione di tempo meteorologico (a differenza dei sensori ottici, il SAR ha la proprietà di osservare oggetti attraverso le nuvole e, anche se parzialmente, attraverso le precipitazioni); il SAR ha anche la proprietà di osservare sotto la superficie terrestre, sia pure limitatamente a piccoli spessori.
R. a domanda e risposta. Sistema costituito da un r. primario, o interrogante, i segnali esploranti del quale azionano un r. secondario, o risponditore, installato sul bersaglio; i segnali dei due r. sono opportunamente codificati, cosicché il r. primario, sul cui indicatore appare una figura caratteristica del codice di risposta, è in grado non solo di localizzare, ma anche di identificare il bersaglio. Tale sistema ha tuttora preminente interesse militare ma ha trovato anche applicazioni civili, per es., in un tipo di radiofaro detto appunto a domanda e risposta.
R. a compressione d’impulsi. R. ad alta efficienza basato sull’adozione di impulsi di relativamente grande durata, modulati linearmente in frequenza (per tale motivo anche detti r. a modulazione di frequenza), il cui effetto è di ridurre sensibilmente la durata dei segnali ricevuti (compressione nel tempo), che si presentano come se fossero relativi a impulsi esploranti molto corti: le cose vanno come se la potenza di picco fosse n volte maggiore di quella reale, essendo n il rapporto di compressione, cioè il rapporto fra la durata degli impulsi esploranti e quella degli impulsi uscenti dal ricevitore, che può raggiungere circa 100.
R. Doppler (o a effetto Doppler). Apparecchio in grado di localizzare bersagli in moto relativo rispetto all’antenna e di misurarne la velocità relativa di allontanamento o di avvicinamento, vD. Se infatti un fascio di radioonde, di frequenza f, incide su un corpo in moto, le radioonde riflesse verso la sorgente sono ricevute con una frequenza pari a f(1+2vD/v), essendo v la velocità di propagazione (effetto Doppler).
R. a impulso singolo (monopulse radar). Tipo di r. in cui le informazioni relative alla distanza e alla direzione del bersaglio possono essere ricavate contemporaneamente da un solo eco.
R. MTI. Sono r. dotati di dispositivi per la soppressione degli echi provenienti da bersagli fissi, in modo da evidenziare gli oggetti in movimento che altrimenti potrebbero essere mascherati.
R. tridimensionali o 3D o volumetrici. Sono r. in grado di indicare direttamente distanza, direzione e quota del bersaglio, usati per la sorveglianza del traffico aereo. Si tratta di apparati piuttosto complessi realizzati secondo tecniche diverse. I primi modelli operativi erano costituiti dall’accoppiamento di un r. di sorveglianza di tipo normale, con indicatore PPI, in grado perciò di dare distanza e direzione, e di un r. per la quota; quest’ultimo aveva un’antenna a ricerca orizzontale, a sua volta animata da un rapido movimento di ricerca verticale, e un indicatore di tipo B.
R. di impiego civile
R. nautici civili. Nel governo di imbarcazioni di classe adeguata a navigare senza riferimenti visivi e con ogni tempo, il r. di navigazione gioca un ruolo fondamentale per la condotta del mezzo in sicurezza, specialmente di notte o con nebbia. I r. di navigazione devono essere di basso costo, semplici da utilizzare e da mantenere, di ridotto peso e ingombro. Le gamme di frequenza utilizzate sono due: la banda X, caratterizzata da minori dimensioni d’antenna e migliore risoluzione, e la banda S, caratterizzata da migliore comportamento in caso di pioggia. Apparati analoghi sono installati a terra per scopi di controllo del traffico navale, specialmente in acque ristrette (porti, canali, stretti ecc.). Nei sistemi di controllo del traffico marittimo (VTS, vessel traffic system), il r. localizza natanti, boe, ostacoli fissi e può fornire una buona immagine dell’ambiente circostante. Le caratteristiche principali dei r. nautici sono: modesta portata, limitata all’orizzonte ottico dell’antenna, a tal fine installata in testa d’albero; modesta potenza (da qualche kilowatt a qualche decina di kilowatt); grande potere risolutore angolare e in distanza, grazie ad antenne a fascio molto stretto (decimi di grado), impulsi molto corti (decimi di millisecondo), indicatori molto curati sempre di tipo PPI.
R. aeronautici. Si possono distinguere in r. aeroportati, cioè installati a bordo degli aeromobili, e r. di sorveglianza del traffico aereo, installati a terra. I r. aeroportati hanno scopi analoghi a quelli usati sulle navi in navigazione, rispetto ai quali hanno sostanzialmente le stesse caratteristiche (salvo più stringenti esigenze di massa e di ingombro); si tratta quindi di r. con presentazione PPI; l’antenna è installata sul muso dell’aeromobile, diretta verso il basso, oppure sotto la fusoliera.
I r. di sorveglianza del traffico aereo sono installati negli aeroporti o in corrispondenza a incroci di aerovie; servono ad avvistare gli aerei che entrano nella zona da essi controllata, a tracciarne la rotta, ad agevolarne le manovre, in particolare quella di atterraggio. Nella gestione e nel controllo del traffico aereo (ATC, air traffic control; ATM, air traffic management) è fondamentale la disponibilità di un quadro completo del traffico, aggiornato in tempo reale, tramite il quale il controllore r. opera per mantenere le separazioni tra gli aeromobili e renderne sicuro e ordinato il traffico. I r. ATC possono essere di tipo primario o secondario. I primi funzionano in modo canonico e operano di norma nelle bande L (da 1250 a 1350 MHz) e S (da 2700 a 3000 MHz). I r. secondari operano con l’ausilio di un apposito transponditore posto a bordo dell’aeromobile che invia un segnale denominato reply in risposta al segnale emesso dalla postazione r. di terra, denominato interrogation. I r., integrati con altri sensori, sono pure fondamentali nella sorveglianza del traffico sulla superficie aeroportuale, caratterizzato, oltre che dagli aeromobili in rullaggio, da elevate densità di mezzi mobili, di varia natura, in un ambiente ristretto, e con ostacoli fissi e mobili.
R. meteorologici. Denominazione generica di r., terrestri o aeroportati, usati per l’avvistamento e lo studio di cicloni, centri temporaleschi e formazioni nuvolose; si tratta generalmente di r. di media potenza, media portata, buona precisione, con indicatore PPI, operanti in banda X (3 cm), che è la banda di frequenze più sensibile alle formazioni nuvolose.
R. di sorveglianza stradale. Il traffico stradale utilizza sensori automatici di sorveglianza per conteggi e misure di velocità e lunghezza dei veicoli, effettuate con spire induttive nell’asfalto. Sono in corso di sviluppo prototipi di r. anticollisione. In condizioni di scarsa visibilità, in particolare di nebbia, tali sistemi dovrebbero avvertire in tempo utile il guidatore della presenza di ostacoli (principalmente, altri veicoli). Un r. anticollisione dovrebbe avere dimensioni e costi estremamente ridotti, insieme a un tasso accettabile di falsi allarmi.
R. di telerilevamento. Il telerilevamento ambientale (remote sensing) è un’area tecnico-scientifica di grande interesse per la radaristica. Il concetto generale di telerilevamento corrisponde a quello di misura a distanza, senza contatto fisico tra lo strumento e l’oggetto da misurare.
Un primo settore del telerilevamento si riferisce alla superficie della Terra (superfici terrestri e marine). L’eco retrodiffuso dalla superficie di interesse dipende in maniera complessa dalle caratteristiche della stessa: materiale, forma, rugosità ecc. Una volta determinate le leggi che governano tale dipendenza (problema diretto), è possibile affrontare il più difficile problema inverso, cioè ricavare certe caratteristiche della superficie dai parametri dell’eco radar. I r. di telerilevamento superficiale sono collocati a bordo di aeromobili o satelliti artificiali e appartengono a due categorie principali: scatterometri e r. d’immagine. Gli scatterometri sono caratterizzati dalla capacità di misura della sezione trasversa di retrodiffusione, o area equivalente r. (backscattering cross section o radar cross section, RCS) della superficie di interesse. Si tratta essenzialmente di r. calibrati, nei quali, cioè, è possibile mettere in relazione univoca la potenza del segnale ricevuto con la RCS. I r. d’immagine sono caratterizzati da un’elevata risoluzione spaziale, tipicamente da qualche metro a qualche decina di metri. Essi sono basati sull’uso di antenne laterali avioniche di grandi dimensioni (SLAR, side looking airborne radar) o, più frequentemente, in applicazioni avioniche o satellitari, di antenne sintetizzate mediante un’opportuna elaborazione della successione di echi provenienti da ciascun punto fisso della superficie. Molte informazioni sono fornite dai SAR che operano con più frequenze e più polarizzazioni. Le applicazioni delle immagini SAR sono svariate e spaziano negli ambiti di oceanografia, geologia, glaciologia, agricoltura, gestione del patrimonio forestale, analisi dell’inquinamento, analisi delle risorse terrestri e altri ancora.
Un secondo importante filone è quello del telerilevamento atmosferico. In tale ambito operano r. finalizzati all’analisi della precipitazione piovosa, nevosa e grandinigena, denominati r. meteorologici, e r. finalizzati alla misura dell’intensità e direzione del vento in quota, la cui denominazione corrente è wind profilers. Il funzionamento dei r. meteorologici si basa sulla retrodiffusione del segnale trasmesso dal r. da parte delle idrometeore, cioè delle particelle di pioggia, neve o grandine. Per quanto riguarda la scelta della frequenza di lavoro, essa è il risultato di un compromesso tra la sensibilità (proporzionale alla sezione di retrodiffusione della precipitazione per unità di volume) e l’attenuazione, che risultano entrambe crescenti con la frequenza. Il compromesso, che naturalmente tiene anche conto delle dimensioni di antenna, comporta nella maggior parte dei casi l’uso della banda S o della banda C. Una volta calibrato il r. meteorologico, la potenza del segnale retrodiffuso è in relazione univoca con la riflettività r. per unità di volume e pertanto con il tasso di precipitazione. In realtà, per poter determinare con ragionevole accuratezza il tasso di precipitazione, occorrono più misure r. indipendenti. Per ottenere un’ulteriore misura ci si può giovare del fatto che, al crescere del diametro, le gocce passano dalla forma sferica a quella di uno sferoide oblungo; pertanto il rapporto delle potenze ricevute in polarizzazione orizzontale e in polarizzazione verticale, cioè la riflettività differenziale, fornisce una seconda misura, possibile con i r. meteorologici polarimetrici. Altre misure, che risultano indicative della velocità radiale delle idrometeore e della turbolenza, possono essere fatte mediante elaborazione del segnale nel dominio della frequenza Doppler. Nell’ambito dei wind profilers, analoghe elaborazioni del segnale ricevuto da direzioni diverse (normalmente in numero di tre), corrispondenti ad altrettanti lobi d’antenna puntati verso l’alto, consentono di ricavare tre componenti del vettore velocità del vento e quindi di ricostruire il campo di vento in quota.
R. di impiego militare
La difesa e, più in generale, le applicazioni militari sono state all’origine dello sviluppo dei r. negli anni 1930. Esse hanno costituito e costituiscono (benché in misura ridotta rispetto al passato) la principale quota del mercato degli apparati radar. I r. militari hanno particolari requisiti di robustezza rispetto alle condizioni ambientali di installazione (urti, vibrazioni, temperatura, umidità, salmastro) e ancor più rispetto all’ambiente operativo, caratterizzato da disturbi elettronici attivi (jammer) e passivi. Inoltre, in alcune applicazioni, essi devono essere protetti dalla minaccia di distruzione fisica costituita dai missili antiradar (ARM, anti radiation missiles o anti radar missiles), capaci di dirigersi verso la sorgente della radiazione r., e da bombe guidate con analoga capacità. I r. militari devono rilevare bersagli di caratteristiche molto diverse, che di norma tendono a sfuggire, con varie tecniche, al rilevamento. Devono infine estrarre dal segnale d’eco il massimo d’informazione riguardo a tali bersagli, in primo luogo la quota degli aeromobili.
{kind=link}
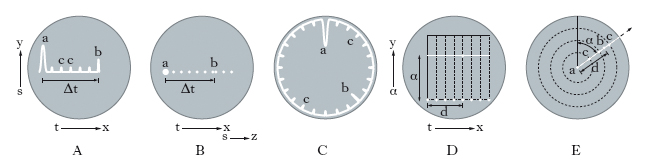
La difesa aerea territoriale ha lo scopo di identificare tutti gli aeromobili che entrano nello spazio aereo nazionale e di guidare i mezzi di contrasto (caccia intercettori o missili) contro eventuali nemici. Essa necessita di r. a grande portata, dell’ordine di qualche centinaia di kilometri, tale che una rete di sorveglianza costituita da un numero limitato di essi (per es., meno di 10 per un territorio di una media nazione europea) sia in grado di coprire l’intero spazio aereo nazionale. Per superare le limitazioni dovute all’orizzonte, particolarmente gravi quando i bersagli da rilevare viaggiano a bassa quota, sono stati sviluppati complessi sistemi denominati AEW (airborne early warning), a bordo di aeromobili di grande capacità. Si tratta di veri e propri sistemi di difesa aerea imbarcati (fig. 7), dei quali il più noto e diffuso è l’AWACS (airborne warning and control system). Un’altra tecnica che consente di superare le limitazioni dell’orizzonte e di raggiungere portate dell’ordine di migliaia di kilometri è quella dei r. oltre l’orizzonte (OTH, over the horizon), operanti nella gamma delle onde decametriche (gamma HF: da 3 a 30 MHz), con propagazione ‘per onda di cielo’ (skywave), basata sulla riflessione da parte della ionosfera.
La seconda applicazione militare del r. è la gestione delle armi. Nel caso di armi di tipo balistico, il r. deve consentirne il puntamento con elevate precisioni (dell’ordine di alcuni secondi d’arco) verso il cosiddetto punto futuro; questo giustifica il nome r. di inseguimento. La precisione del r. è quindi il principale requisito e la soluzione tecnica più moderna è quella monoimpulso. Nel caso di armi di tipo missilistico, il r. deve guidare il missile sul bersaglio; la guida può essere: a) attiva, e in tal caso il missile è dotato di un piccolo r., denominato seeker; b) semiattiva, quando il missile è dotato della sola parte ricevente; c) di tipo command, quando il missile riceve via radio i comandi di direzione dal sistema d’arma, dotato di radar. Radar-relè Sistema di sorveglianza r. di vaste zone a scopo militare, realizzato mediante r. panoramici installati su aerei e su satelliti artificiali terrestri, i cui rilevamenti e localizzazioni integrano e ampliano, in tempo reale, i dati dei centri di controllo delle stazioni r. terrestri, consentendo così una tempestiva valutazione e una subitanea reazione all’insorgere di una minaccia lontana (lancio di missili ecc.).