
modulazione
Fisica
Variazione temporale del valore o dell’intensità di una grandezza fisica.
In ottica, un raggio luminoso si dice modulato se la sua intensità varia nel tempo secondo una legge nota. La m. della luce si può realizzare con due procedimenti diversi: la m. d’emissione si attua agendo direttamente sulla sorgente luminosa, che può essere realizzata con un diodo a emissione luminosa (LED) di cui si modula la tensione applicata; la m. per trasparenza si ha quando sul cammino del raggio luminoso è inserito un mezzo la cui trasparenza varia opportunamente nel tempo.
M. elettroottica
Basata sulla birifrangenza provocata in alcune sostanze dal campo elettrico, costituisce un caso particolare di m. per trasparenza con luce polarizzata. Questa m. trova importanti applicazioni per controllare l’intensità, la fase o la polarizzazione di una radiazione elettromagnetica, e in particolare luminosa, per es. allo scopo di modulare fasci ottici.
Gli effetti sfruttati sono la birifrangenza elettrica (effetto Kerr) e l’effetto Pockels, consistente nella deformazione meccanica che certi cristalli subiscono in conseguenza dell’applicazione di un campo elettrico, determinando una variazione delle proprietà rifrangenti: l’effetto Pockels offre migliori possibilità dell’effetto Kerr in quanto è lineare, laddove il primo è un effetto quadratico.
Il fenomeno si verifica con particolare evidenza in certi cristalli tetragonali, birifrangenti, quali i fosfati acidi di potassio e i fosfati acidi d’ammonio. In questi cristalli, l’ellissoide degli indici è di rotazione intorno all’asse principale di simmetria del cristallo (asse z): l’applicazione di un campo elettrico parallelo a questo asse provoca una deformazione dell’ellissoide, con la comparsa di due assi ottici indotti (x′, y′) a 90° tra di loro e a 45° con gli assi cristallografici. Un raggio luminoso che si propaghi dentro il cristallo con polarizzazione parallela a uno di questi assi subirà quindi un ritardo che è funzione dell’intensità del campo elettrico applicato (m. di fase). Opportune disposizioni potranno poi trasformare la m. di fase in m. di ampiezza, di polarizzazione o di frequenza.
Il modulatore è il dispositivo che varia e regola il valore o l’intensità di una grandezza, di un processo, di una funzione. Se ne distinguono due tipi: il modulatore di tipo longitudinale, nel quale il fascio luminoso si propaga dentro il cristallo parallelamente all’asse z, e il tipo trasversale, nel quale la propagazione avviene normalmente a questo asse.
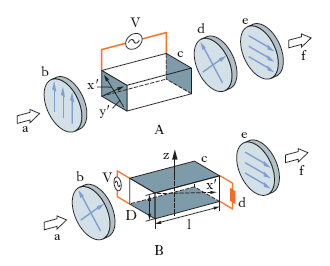
In un modulatore longitudinale, un fascio di luce comunque polarizzato si può pensare decomposto nel cristallo secondo due fasci polarizzati linearmente in direzioni parallele agli assi ottici indotti. Gli indici di rifrazione per questi fasci possono scriversi nella forma: n=n0±rn30Ez/2, dove Ez è l’intensità del campo elettrico, n0 l’indice di rifrazione in assenza di campo elettrico e r una costante del cristallo. Tali componenti, dopo aver percorso lo spessore l del cristallo, si trovano sfasati della quantità: Δϕ=2πlΔn/λ0=2π rn30lEz/λ0, dove λ0 è la lunghezza d’onda nel vuoto della radiazione incidente. Se V è la tensione applicata, essendo Ez=V/l si ha Δϕ=πV/Vπ, dove Vπ è la tensione che provoca uno sfasamento di π. Così, nella disposizione longitudinale, lo sfasamento è proporzionale alla tensione applicata e indipendente dallo spessore del cristallo. In fig. 1A è riportato lo schema di un modulatore longitudinale. Il cristallo, c, è posto fra due polarizzatori incrociati, b ed e, i quali sono con i loro assi a 45° rispetto agli assi x′ e y′ indotti nel cristallo dal campo elettrico; una lamina a quarto d’onda, d, provoca lo sfasamento fisso di π/2; a è il fascio luminoso da modulare, f quello modulato dalla tensione V, applicata a due facce del cristallo c debolmente argentate.
La fig. 1B mostra invece lo schema di un modulatore trasversale. Il campo elettrico è applicato lungo l’asse ottico z, ma il fascio di luce polarizzata in entrata, a, si propaga perpendicolarmente a esso. Tale fascio può essere decomposto in due fasci componenti, polarizzati l’uno parallelamente all’asse z, l’altro parallelamente all’asse x′ indotto dal campo nel cristallo, c. Mentre il campo non ha effetto sulla propagazione del primo fascio, il secondo subisce un ritardo Δϕ=π rn30lV/λ0D, dove D è lo spessore del cristallo e l la sua lunghezza. Il cristallo è posto fra una lamina a quarto d’onda, b, e un polarizzatore, e, con asse perpendicolare all’asse z del cristallo; f è il fascio in uscita, modulato. Questa disposizione ha notevoli vantaggi rispetto alla precedente. In primo luogo, aumentando il rapporto l/D si riduce la tensione necessaria per ottenere un determinato ritardo. In secondo luogo, gli elettrodi occorrenti per l’applicazione della tensione modulante non intercettano il fascio. In terzo luogo, infine, in questa disposizione, a differenza che in quella longitudinale, si può ottenere una forte riduzione della distorsione applicando il campo modulante in forma di onda viaggiante nel cristallo, il che si attua, come mostrato nella fig. 1B, applicando la tensione V a un estremo degli elettrodi e chiudendo l’altro estremo su un’opportuna impedenza, d. M. di questo tipo possono avere una larghezza di banda dell’ordine di 10 MHz a frequenze modulanti fra 0,5 e 2 GHz; la potenza di m. è dell’ordine di qualche watt.
M. con ultrasuoni
Tale tipo di m. sfrutta i fenomeni di diffrazione che insorgono in un mezzo trasparente sede di ultrasuoni. La diffrazione della luce da parte delle onde sonore (➔ acustoottica) offre un modo per controllare la frequenza, l’intensità e la direzione di un fascio ottico. Un modulatore ottico a ultrasuoni è tipicamente formato da una cella a ultrasuoni in cui viene fatta variare la frequenza. Poiché l’intensità della luce diffratta varia al variare dell’intensità del campo ultrasonoro, si ha per es. m. del fascio non diffratto. Tali celle possono anche essere usate per modulare in frequenza la luce diffratta.
Musica
Passaggio della voce o del suono da una tonalità a un’altra. Può essere: stabile o passeggera, secondo che nel nuovo tono si rimanga permanentemente o fuggevolmente; vicina o lontana, secondo che si svolga tra toni relativi o non relativi. Può compiersi improvvisamente, mediante accordi già contenenti suoni della nuova tonalità, o gradatamente, mediante una serie di armonie intermedie; può anche avvenire di sorpresa, giovandosi, per es., dell’enarmonia.
Telecomunicazioni e tecnica
Nella tecnica delle comunicazioni, m. è l’insieme delle tecniche mediante le quali il contenuto informativo del messaggio da trasmettere, rappresentato dal segnale modulante m(t), viene impresso sui parametri costitutivi del segnale portante p(t), ottenendo così un segnale modulato maggiormente adatto alla trasmissione.
La fondamentale importanza della m. nella tecnica delle comunicazioni deriva dal fatto che normalmente il segnale modulante non è assolutamente adatto alla trasmissione diretta sul canale trasmissivo, mentre il segnale modulato può essere trasmesso in modo efficiente nei confronti dell’attenuazione, della distorsione, dei disturbi, del rumore o delle interferenze. Le varie tecniche di m. variano a seconda delle caratteristiche del messaggio e del canale di trasmissione e sono realizzate in modo da rendere possibile e tecnicamente semplice l’operazione inversa, detta demodulazione, mediante la quale il segnale modulante, ovvero una copia fedele del messaggio trasmesso, è reso disponibile in ricezione.
Distinguendo i vari casi in cui il segnale m(t) è di tipo analogico (messaggio continuo) o di tipo campionato (messaggio discreto), in cui la portante p(t) è a sua volta continua o numerica, le m. si definiscono analogiche quando i segnali m(t) e p(t) sono entrambi analogici; impulsive quando m(t) è di tipo analogico mentre p(t) è costituita da una sequenza di impulsi; numeriche quando la sorgente di informazione è di tipo discreto.
Nella grande maggioranza dei casi la natura fisica della portante e del segnale modulato è di tipo elettrico o elettromagnetico. Non mancano tuttavia esempi differenti, come il caso della portante ottica usata nei sistemi di trasmissione su fibra ottica o il caso della portante acustica usata nei sistemi di prospezione e telerilevamento del sottosuolo, nella tecnica di telefonia subacquea e nel sonar.
M. analogiche
La portante più comunemente utilizzata in tali casi è di tipo sinusoidale:
P(t) = A cos(2πft + ϕ),
ove A, f, ϕ sono rispettivamente l’ampiezza, la frequenza e la fase (iniziale). Ciascuno di tali tre parametri può essere reso variabile in funzione del segnale modulante m(t), ottenendo le m. di ampiezza (amplitude modulation, AM), di frequenza (frequency modulation, FM) e di fase (phase modulation, PM). Le ultime due m. presentano strette affinità e vengono indicate come m. angolari.
M. di ampiezza
Per questo tipo di m., l’ampiezza della portante p(t) viene variata (fig. 2) dalla modulante m(t) secondo l’espressione
A = A0 + bm(t),
con A0 e b positivi. Lo spettro di frequenza del segnale modulato s(t) è costituito dalla riga della portante a frequenza fp e da due bande laterali (superiore e inferiore), speculari rispetto a fp, aventi entrambe lo stesso contenuto spettrale del segnale m(t) (m. a banda laterale doppia). Se A0+bm(t) è non negativo per ogni t (il che si ottiene per A0 sufficientemente grande), si ha corrispondenza biunivoca fra m(t) e l’inviluppo del segnale modulato (m. d’inviluppo), con grandi vantaggi nella realizzazione del sistema di demodulazione (demodulatore d’inviluppo o rivelatore). Detto m0 il valore massimo del modulo di m(t), il rapporto bm0/A0, espresso in percento, è detto grado, indice o profondità di modulazione. In m. d’inviluppo la massima profondità di m. è del 100%, mentre il rapporto fra la potenza trasmessa sulla frequenza della portante e la potenza associata alle bande laterali non è mai inferiore a 2. Pertanto, nel caso migliore, solo un terzo della potenza trasmessa contribuisce alla trasmissione dell’informazione, non essendo l’emissione della portante utile a tale scopo.
Per ovviare a tale inconveniente, si hanno i sistemi a soppressione di portante (double side band-suppressed carrier, DSB-SC), nei quali si ha A0=0 (sotto l’ipotesi che m(t) abbia valor medio nullo). La demodulazione è in tale caso più complessa ed è detta di tipo coerente.
I modulatori di ampiezza sono realizzati per mezzo di vari tipi di circuiti. Per esempio, effettuando il prodotto fra m(t) e p(t) si ottengono i modulatori a prodotto, ovvero, effettuando il quadrato della somma di p(t) e di m(t) si ottengono i modulatori a elemento quadratico. Il segnale modulato viene estratto mediante filtraggio.
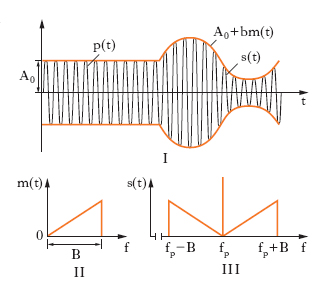
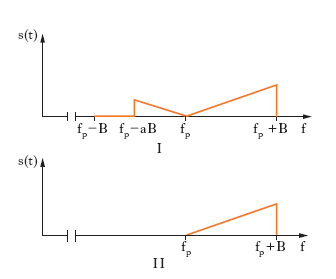
Nei sistemi a doppia banda laterale, il contenuto informativo è ripetuto due volte, mentre anche una sola banda sarebbe sufficiente per la trasmissione. Tale osservazione è importante quando interessa limitare la larghezza di banda del canale di trasmissione. A tale scopo sono realizzati i sistemi di m. a banda vestigiale (vestigial side band, VSB) e a banda laterale unica (single side band, SSB), in cui un opportuno filtro passa banda riduce o elimina del tutto una delle due bande laterali del segnale a doppia banda laterale. Se B è la banda del segnale modulante m(t) (II in fig. 2), il sistema a doppia banda laterale ha una banda pari a 2B (III in fig. 2), il sistema VSB ha una banda pari a (1+a)B (con 0 <a<1, I in fig. 3) e il sistema SSB ha una banda pari a B (II in fig. 3).
M. angolari
Con riferimento all’espressione della portante sinusoidale, nelle m. angolari, il segnale modulante è usato per rendere variabile l’argomento 2πft+ϕ, mentre l’ampiezza A rimane costante.
Nei sistemi PM la variazione di fase istantanea è funzione del segnale modulante, essendo ϕ(t)=ψm(t), mentre nei sistemi FM la frequenza istantanea varia secondo la legge f(t)=f0+δm(t). Tenuto conto che la frequenza istantanea è pari alla derivata rispetto al tempo della fase istantanea (divisa per 2π), un sistema PM è equivalente a un sistema FM con
ψ dm(t)
f(t) = f0 + −−− −−−−−−.
2π dt
Pertanto le due m. angolari possono essere considerate sostanzialmente equivalenti, a meno di una operazione di derivazione (o di integrazione) sul segnale modulante. Poiché non vi sono variazioni di ampiezza, le m. angolari non comportano variazioni di potenza del segnale modulato rispetto alla portante non modulata, ma solo ridistribuzione del contenuto spettrale. Per i sistemi PM e FM si definiscono degli indici di m. in funzione delle quantità ψ e δ e dello spettro di densità di potenza del segnale modulante.
Nel caso particolare di segnale modulante di tipo sinusoidale, pari a m(t)=cos2πfmt, l’indice di m. m del segnale FM è pari a m=δ/fm. In tal caso lo spettro del segnale modulato consiste in una serie (infinita) di righe spettrali di frequenza fk=f0+kfm (k= ..., -2, -1, 0, 1, 2, ...) e ampiezza proporzionale alla funzione di Bessel di prima specie di ordine k e di argomento m, indicata con il simbolo Jk (m). Tale spettro comprende la portante e una serie di componenti laterali, di frequenze simmetriche rispetto alla portante, distanti da questa di multipli di fm.
La larghezza di banda di un canale FM è teoricamente infinita, ma, poiché all’aumentare dell’indice k l’ampiezza delle funzioni di Bessel decresce rapidamente, solo un numero limitato di componenti spettrali viene trasmesso. Trascurando un decimillesimo della potenza totale, la larghezza di banda risulta pari a B=2(δ+3fm).
A differenza della m. di ampiezza, la m. di frequenza richiede una larghezza di banda del canale di trasmissione variabile in funzione dell’indice di modulazione. I sistemi FM presentano notevoli vantaggi nei confronti dei sistemi AM, soprattutto in relazione alle distorsioni di canale e al rumore. D’altra parte, poiché la larghezza di banda in FM è molto maggiore rispetto a quella in AM, la m. di frequenza è usata con portanti di frequenza relativamente alta, quali i sistemi di radiodiffusione e di radiotelefonia a frequenze superiori a diverse decine di MHz, nella trasmissione del canale audio nei sistemi televisivi, nei sistemi in ponte radio per telefonia o per televisione (collegamenti fra ripetitori) e nei sistemi di trasmissione via satellite.
M. impulsive
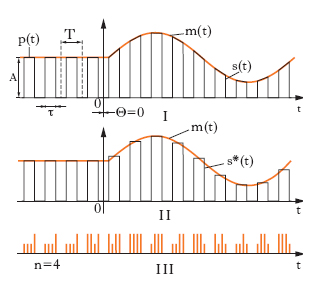
La forma d’onda utilizzata come portante in tali tipi di m. è costituita da una successione periodica di impulsi rettangolari (I in fig. 4), caratterizzati da: periodo di ripetizione T, ampiezza A, durata (o larghezza) τ, posizione Θ rispetto al riferimento periodico (in assenza di m., si ha sempre Θ=0). Supposto che il segnale modulante sia analogico e a banda limitata, di frequenza massima fM, il periodo T è scelto sulla base del teorema del campionamento, secondo il quale deve risultare T<1/(2fM). Se tale relazione non è soddisfatta, non è più possibile riottenere in ricezione il segnale emesso dalla sorgente, con conseguente perdita di informazione.
Dopo aver applicato al segnale modulante il processo di campionamento, è possibile ottenere vari tipi di m. angolare a seconda che siano resi variabili i parametri A, τ o Θ della portante. Il primo tipo viene detto m. impulsiva di ampiezza (pulse amplitude modulation, PAM), il secondo m. impulsiva di durata (pulse width modulation, PWM), il terzo m. impulsiva di posizione (pulse position modulation, PPM).
Nel sistema PAM (I in fig. 4), rimane invariato il parametro τ, con Θ=0, mentre è modulata solo l’ampiezza A della portante p(t). Il modulatore è realizzato applicando dapprima al segnale modulante m(t) una porta analogica pilotata dalla portante (ciò che equivale all’operazione di prodotto fra i segnali modulante e portante). Si ottiene in tal modo il cosiddetto segnale PAM esatto, s(t) (I in fig. 4), dal quale il segnale modulante può essere riottenuto con una semplice operazione di filtraggio passabasso. Lo spettro del segnale PAM esatto è costituito dallo spettro del segnale modulante e dalla sua ripetizione intorno alle armoniche della frequenza 1/T. Il segnale PAM esatto viene sottoposto ai processi di campionamento e tenuta, completando così il processo di m. (segnale PAM rettangolare, s*(t) in fig. 4, II). La demodulazione consiste in un processo di equalizzazione e di filtraggio.
I modulatori PWM e PPM si ottengono a partire dal segnale PAM attraverso circuiti di comparazione con forme d’onda di tipo triangolare, trasformando l’informazione di ampiezza in modifica della posizione dei fronti d’onda di salita e di discesa degli impulsi. A parte alcuni casi specifici, come per es. alcuni sistemi radar, in cui sono usati segnali di tipo PPM, le m. impulsive finora considerate non sono usate per la trasmissione diretta su canale. Il loro uso è in genere limitato all’interno di apparati elettronici o di dispositivi di calcolo.
Nei sistemi di trasmissione si usano sistemi di m. impulsiva di tipo codificato, ottenuti applicando a segnali PAM i processi di quantizzazione e codifica. I principali sistemi di questo genere sono la m. a impulsi codificati (pulse code modulation, PCM), la m. delta (delta modulation), la m. a spettro disperso (spread spectrum modulation). Considerando un segnale PAM, la quantizzazione consiste nell’approssimare ogni campione (analogico) con un valore scelto in un insieme di ampiezze discrete. Tale processo comporta un errore, detto errore di quantizzazione. Se i valori discreti sono equispaziati, la quantizzazione è detta uniforme.
La codifica consiste nel rappresentare ogni valore quantizzato con un numero d’ordine, espresso di norma in forma binaria. Di conseguenza, a ogni campione PAM (s*(t) in fig. 4, II) viene a corrispondere un insieme di n bit, ove n è detto lunghezza di parola (wordlength) attraverso i processi di quantizzazione e codifica; il segnale così ottenuto è detto PCM (III in fig. 4). Il modulatore PCM può essere ottenuto per mezzo di un convertitore analogico digitale applicato a un segnale PAM rettangolare. Il rumore presente all’uscita di un canale PCM è dovuto agli errori introdotti dal canale di trasmissione. Tali errori dipendono dal rumore intrinseco del canale e dalla lunghezza di parola n. In ogni caso, il rumore sul segnale ricevuto è molto inferiore a quello relativo alle m. analogiche, a parità di canale, ma ovviamente la larghezza di banda è molto superiore.
M. numeriche
I segnali numerici ottenuti con i sistemi PCM, delta o spread spectrum possono non essere adatti alla trasmissione diretta sul canale. Tali segnali sono peraltro assimilabili a segnali numerici di tipo generale, quale quelli che si considerano nei sistemi di trasmissione di dati o nelle interconnessioni fra mezzi di calcolo. I segnali numerici possono essere a due livelli (segnali binari) come quelli considerati in precedenza, oppure a più livelli (per es., associando in un segnale numerico binario i bit a due a due, si può ottenere un segnale a quattro livelli). Il procedimento di m. è scelto in modo da consentire il transito del segnale sul canale numerico con il minor grado di distorsione possibile. Occorre tenere presente che, in un canale numerico, non interessa ottenere in ricezione la riproduzione fedele del segnale modulante, ma solo la ricostruzione di una sequenza dei livelli con la minore probabilità di errore possibile rispetto alla sequenza trasmessa.
I sistemi di m. numerica più usati sono la m. numerica di ampiezza (amplitude-shift keying, ASK), di frequen;za (frequency-shift keying, FSK), di fase (phase-shift keying, PSK). Nel sistema ASK viene generata una successione di segnali del tipo Aks(t) ove Ak è una sequenza di ampiezze, con k=1, 2, ..., M (ove M è il numero dei livelli del segnale numerico) e s(t) è un opportuno segnale diverso da zero nell’intervallo di campionamento (cioè per 0<t<T). Le ampiezze Ak possono essere tutte positive (m. numerica di ampiezza unipolare) o a valor medio nullo (m. numerica di ampiezza antipodale). Il segnale s(t) può essere scelto come un elemento di onda quadra (m. numerica di ampiezza in banda base), ovvero come un pacchetto d’onda sinusoidale (m. numerica di ampiezza a doppia banda laterale). Altre possibilità derivano dall’esigenza di minimizzare l’interferenza intersimbolica.
Nel sistema FSK la successione di segnali è del tipo A cos(2πfkt) ove fk è una sequenza di frequenze, generate da un insieme di oscillatori sinusoidali. Ovviamente in un canale numerico binario sono usati solo due valori di frequenza. Il sistema è realizzato in modo che, in corrispondenza ai salti di frequenza, le fasi subiscano la minore discontinuità possibile.
Nel sistema PSK la successione di segnali è del tipo A cos[2πf+(2k−1)π/M] per cui agli M livelli del segnale numerico corrispondono M valori di fase del segnale trasmesso. Tale sistema di m. numerica è molto usato a causa dei vantaggi nei confronti del rumore e della larghezza di banda, rispetto ai sistemi ASK e FSK. Il sistema di demodulazione PSK richiede la conoscenza della fase di riferimento, per cui è necessario provvedere alla trasmissione del riferimento di fase della portante (sistema PSK coerente). Un sistema differente prevede la corrispondenza degli stati del segnale numerico con i salti di fase del segnale (sistema PSK differenziale) e non richiede in demodulazione la conoscenza della fase di riferimento.
Modulometri
Il modulometro è un dispositivo atto a misurare l’indice di m. di un segnale modulato, realizzato diversamente a seconda del tipo di segnale e del sistema di modulazione. Nel caso di m. di ampiezza, per es., i m. sono schematicamente costituiti da un dispositivo di demodulazione mediante il quale si misura l’ampiezza della tensione modulante; nel caso della m. di frequenza, per rilevare lo scostamento istantaneo delle frequenze della tensione modulata rispetto alla portante, viene utilizzato un circuito discriminatore.
Elettronica di potenza
La tecnica di m. più usata in elettronica di potenza per il comando degli interruttori elettronici dei convertitori statici è quella PWM (v. sopra). Tale tecnica di m. è in particolare utilizzata nei chopper e negli invertitori , allo scopo di costruire ai capi del convertitore una tensione di uscita V(t) il cui valore medio approssimi istante per istante la tensione desiderata Vm(t).
Gli istanti di commutazione dei componenti del convertitore sono determinati dal confronto tra due funzioni: una di forma triangolare e frequenza costante chiamata portante, e una Vmod di forma, ampiezza e frequenza pari alla tensione desiderata in uscita Vm(t). Quando la modulante risulta maggiore della portante, si accende un componente di un ramo del convertitore e si spegne l’altro componente dello stesso ramo, viceversa accade quando la portante risulta maggiore della modulante.
Il rapporto tra la frequenza della portante e la frequenza della modulante definisce il rapporto mf; tale parametro se è di valore elevato può non essere intero e quindi la portante e la modulante non sono sincronizzate e in uscita sono presenti delle subarmoniche dell’armonica fondamentale; se invece mf non è elevato, allora le due onde portante e modulante debbono essere sincronizzate, e si ha assenza di subarmoniche. In ambedue i casi si dovrà tener conto, se il controllo è di tipo digitale, del tempo di campionamento.
Oltre al parametro suddetto si definisce un altro parametro ma come il rapporto tra l’ampiezza della modulante e l’ampiezza della portante. Se ma<1 si ha una m. lineare e l’ampiezza della fondamentale varia linearmente con tale coefficiente; oltre alla fondamentale si hanno delle armoniche di valore mf, 2mf, 3mf e, centrate intorno a ciascuna di queste, delle armoniche di valore più piccolo; per ma>1, si ha la cosiddetta sovramodulazione, e la tensione di uscita ha un contenuto armonico maggiore. Infine, all’aumentare di ma la tensione di uscita si avvicina sempre di più all’onda quadra di periodo pari a quello della tensione modulante.