
invertitore
Fisica
In ottica, dispositivo, di vario genere, per raddrizzare le immagini date da un obiettivo: utilizzato, per es., nei cannocchiali terrestri.
Tecnica
I. di corrente continua
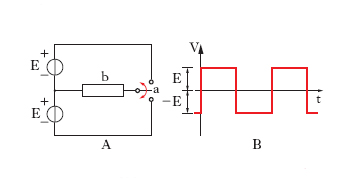
Dispositivo (detto anche inverter e talvolta ondulatore) che attua l’inversione di una corrente continua, cioè permette di ottenere una corrente periodica da una sorgente di corrente continua. Può essere rotante, e si parla allora più esattamente di macchina elettrica invertitrice o convertitrice; infatti la qualifica di i. è specificatamente riservata a dispositivi statici. In linea di principio un i. monofase si comporta come un commutatore (a in fig. 1A) che periodicamente connette il terminale di un carico b al morsetto positivo e a quello negativo di una sorgente di tensione continua 2E (fig. 1B), mentre l’altro terminale è collegato al punto centrale della sorgente; la tensione così applicata al carico è alternata, con forma d’onda rettangolare, frequenza regolabile pari a quella con cui agisce il commutatore e ampiezza pari alla metà della tensione continua della sorgente di alimentazione.
Classificazione
Gli invertitori possono essere classificati in diversi modi: a seconda dei dispositivi elettronici impiegati, si hanno gli i. a tiristori, gli i. a transistori, gli i. a GTO ecc.; a seconda delle modalità per lo spegnimento dei componenti si hanno gli i. a commutazione naturale e quelli a commutazione forzata; a seconda della tecnica utilizzata per la regolazione della tensione e/o della corrente di uscita dell’i. si distinguono gli i. a onda quadra, gli i. con comando a sfasamento e gli i. a modulazione della larghezza di impulso o PWM (pulse width modulation); a seconda che il circuito in corrente continua che alimenta l’i. abbia un valore costante della tensione o della corrente, si hanno i. a tensione impressa o a corrente impressa, che costruttivamente si differenziano tra loro per la presenza, rispettivamente, di una capacità o di una induttanza tra la sorgente continua e l’i. vero e proprio.
Gli i. si differenziano anche a seconda del campo di applicazione, dovendo alcune volte consentire una regolazione della frequenza e dell’ampiezza della tensione, come nel caso di alimentazione di motori, e altre volte fornire una tensione puramente sinusoidale con frequenza e ampiezza costanti, come nel caso degli i. per gruppi statici di continuità.
I. a tiristori
Per ciò che riguarda i componenti utilizzati nella realizzazione degli i., è opportuno tenere presente che i tiristori possono essere comandati solo in accensione, applicando tra il terminale di comando (gate) e il catodo un opportuno impulso d’innesco; per tale motivo il loro impiego è rivolto principalmente alla realizzazione degli i. a commutazione naturale, poiché negli i. a commutazione forzata l’utilizzo di questi componenti richiede l’impiego di opportuni circuiti ausiliari di spegnimento. Infatti, per ottenere lo spegnimento di un tiristore è necessario ridurre la corrente che lo attraversa al di sotto di un valore minimo di mantenimento della conduzione; inoltre, per evitare che la successiva comparsa ai terminali del componente di una tensione di polarizzazione diretta provochi un’accensione indesiderata del tiristore in assenza del segnale d’innesco sul gate, è necessario applicare sul componente una tensione di polarizzazione inversa per un intervallo di tempo superiore a quello (indicato dai costruttori con tq) che il tiristore impiega per riacquistare la propria capacità di bloccare la corrente. Dagli anni 1950 fino ai primi anni 1980, la necessità di utilizzare circuiti ausiliari per lo spegnimento dei tiristori ha limitato a qualche centinaia di Hz la frequenza di commutazione degli i., influendo negativamente sul rendimento, l’ingombro e il costo di tali convertitori statici. L’avvento di componenti di potenza che possono essere spenti attraverso un segnale di corrente (BJT e GTO) o di tensione (MOSFET e IGBT) sul gate, ha consentito successivamente, nel campo di potenza fino a diverse centinaia di kW, di costruire i. più compatti e di costo inferiore, i quali utilizzano frequenze di commutazione da qualche kHz fino ad alcune decine di kHz.

I. a commutazione naturale
I tiristori trovano ancora una diffusa applicazione nel campo delle potenze più elevate, dove quasi sempre sono impiegati i. a commutazione naturale; infatti la commutazione naturale viene utilizzata solo se il carico è una rete elettrica per la trasmissione di energia o un motore sincrono sovraeccitato, tale cioè da imporre l’ordine ciclico delle commutazioni. È questo il caso degli i. a commutazione dal carico o LCI (load commutated inverter), i quali trovano applicazione principalmente nell’azionamento di macchine sincrone di potenza compresa tra qualche MVA e alcune decine di MVA. La struttura di un i. LCI (fig. 2A) è quella classica degli i. a corrente impressa o CSI (current stiff inverter), i quali sono caratterizzati dal fatto di essere alimentati con una corrente Id che si mantiene costante nel tempo per effetto del valore elevato di induttanza di un induttore L posto in serie alla sorgente di alimentazione a di tensione continua Vd, costituita generalmente da un raddrizzatore trifase collegato alla rete. Un i. di tipo LCI è costituito da un ponte trifase di tiristori, la cui ciclica accensione provvede a commutare nelle fasi RST di una macchina sincrona b la corrente del circuito d’ingresso.
L’accensione dei tiristori è effettuata con la sequenza indicata in fig. 2B in funzione della posizione ϑ del rotore della macchina; per ottenere che le forze elettromotrici del motore (eR, eS, eT in fig. 2A) provvedano allo spegnimento naturale dei tiristori è necessario che l’onda della corrente inviata in ciascuna fase (per es., iR in fig. 2C) risulti in anticipo di un angolo γ rispetto all’onda della forza elettromotrice concatenata relativa alle fasi in commutazione (per es., eRS in fig. 2C). L’angolo γ dipende dalla velocità di rotazione ω del rotore, dal valore della corrente Id, dal tempo di spegnimento tq dei tiristori e dal valore dell’induttanza subtransitoria LC del motore. Se il carico non è in grado di provvedere allo spegnimento dei tiristori, come per es. nel caso di un motore asincrono trifase, lo schema di fig. 2A deve essere completato collegando in parallelo a ciascun tiristore un circuito per lo spegnimento forzato.

I. a tensione impressa
Oltre che con i tiristori, gli i. CSI possono essere realizzati in linea di principio anche con componenti elettronici di potenza comandabili in accensione e spegnimento attraverso il gate. Tuttavia, poiché nelle applicazioni il carico è quasi sempre di tipo induttivo, tale soluzione non è utilizzata nella pratica, in quanto la commutazione forzata della corrente impressa dal circuito d’ingresso dell’i. da una fase all’altra di un carico induttivo comporterebbe la comparsa ai morsetti del carico di sovratensioni tanto più elevate quanto maggiore è l’induttanza del carico stesso. Perciò nella maggior parte delle applicazioni in cui è necessaria la commutazione forzata dei componenti si preferisce utilizzare gli i. a tensione impressa; tale tipo di i. può avere una configurazione atta ad alimentare un carico monofase o polifase. Nelle applicazioni di maggiore potenza si impiegano i. trifasi a tensione impressa (fig. 3A) costituiti generalmente da 6 componenti elettronici di potenza a disposti a ponte e comandati in sequenza in modo da ottenere un sistema trifase simmetrico di tensioni. Questo tipo di i., detto VSI (voltage stiff inverter), è caratterizzato da un condensatore di capacità C posto tra la sorgente a corrente continua b (costituita generalmente da un raddrizzatore trifase controllato alimentato dalla rete in corrente alternata, con in serie un induttore di induttanza L elevata per la riduzione dell’ondulazione della corrente di uscita) e l’i., capace di mantenere costante il valore Vd della tensione ai morsetti di ingresso dell’i. al variare del carico. I diodi c indicati nello schema, detti diodi di libera circolazione, hanno lo scopo di consentire il passaggio della componente reattiva della corrente erogata al carico d (per es., la corrente iR in fig. 3A), impedendo così che tale corrente diventi pulsante; infatti se il carico è induttivo, come avviene nel caso dei motori, all’inversione della tensione applicata a ciascuna fase non corrisponde istantaneamente l’inversione della corrente e pertanto, quando, per es., per alimentare la fase R del carico è stato acceso S4 dopo lo spegnimento di S1, la corrente deve continuare a fluire nello stesso verso per un certo tempo e può richiudersi attraverso il diodo D4.
Per un i. con tensione di uscita a onda quadra la sequenza con la quale si accendono i componenti elettronici è indicata in fig. 3B: i morsetti RST del carico si portano a potenziale Vd o a potenziale 0 a seconda che si accenda il componente della parte superiore o inferiore del ramo. Le tensioni concatenate hanno la forma d’onda di fig. 3C, che riporta la tensione tra le fasi R e S. Se il carico è collegato a stella ed è equilibrato, come avviene nel caso dei motori, la forma d’onda della tensione di fase è quella riportata in fig. 3D; per la forma tipica a 6 gradini di questa tensione gli i. trifase a onda quadra sono detti anche six-step VSI. In fig. 3E è mostrato l’andamento della corrente di linea, nel quale sono stati evidenziati gli intervalli in cui la corrente passa attraverso il componente di commutazione e quelli in cui si richiude attraverso il diodo di libera circolazione.

Oltre che con la sequenza di accensione e spegnimento appena descritta, i componenti elettronici di potenza di un i. a tensione impressa possono essere comandati utilizzando la tecnica di controllo della modulazione a larghezza di impulso o PWM, per cui in questo caso gli i. del tipo mostrato in fig. 3A sono detti i. PWM o PWM-VSI. Negli i. PWM il comando di accensione e spegnimento dei componenti elettronici di ciascuna fase dell’i. è ottenuto dal confronto tra un’onda triangolare, detta portante, di ampiezza e frequenza fisse, e un’onda di controllo, detta modulante, regolabile in forma, frequenza e ampiezza, dalla quale dipende l’onda di tensione risultante ai morsetti di uscita dell’invertitore. Di particolare importanza per le applicazioni sono gli i. controllati con la tecnica PWM sinusoidale (fig. 4A), nei quali per ciascuna delle fasi RST dell’i. l’accensione dei componenti è determinata dal confronto tra la portante vp, di frequenza fp e ampiezza Vp, e un’onda modulante sinusoidale (per es., l’onda vmR per la fase R), di frequenza fm e ampiezza Vm. Con tale tecnica di modulazione in ciascuna fase dell’i. è mantenuto acceso il componente della parte superiore durante gli intervalli di tempo in cui la modulante è maggiore della portante, mentre, nel caso contrario, è il componente della parte inferiore a essere posto nello stato di conduzione. Ne consegue che i morsetti di uscita dell’i. sono portati alternatamente al potenziale Vd o al potenziale 0, per cui le onde di tensione risultanti (per es., VRN e VSN in fig. 4 B) sono costituite da una sequenza di impulsi di larghezza variabile in funzione dell’ampiezza e della frequenza della modulante.
A tale proposito sono considerati indici caratteristici della modulazione i rapporti ma=Vm /Vp, detto indice di modulazione di ampiezza, e mf=fp/ fm, detto indice di modulazione di frequenza. Le tensioni concatenate ai morsetti di uscita dell’i. hanno la forma d’onda di fig. 4C, nella quale è riportata la tensione tra i morsetti R e S. In alcune applicazioni invece della tensione è necessario controllare la corrente di uscita dell’i., per cui la modulazione della tensione di uscita dell’i. è determinata attraverso un anello di controreazione che effettua il confronto tra l’onda di corrente effettivamente erogata e quella che si desidera ottenere in uscita all’i.; in questo caso l’i. viene detto i. PWM regolato in corrente o CRPWM-VSI.
Gravità delle conseguenze
Gli i., come si può notare dall’andamento delle tensioni e correnti mostrate nelle figure, consentono di costruire, a partire da una tensione continua, una tensione o una corrente alternata di frequenza e ampiezza desiderata. Tali grandezze periodiche risultano somma della componente fondamentale e di armoniche superiori di ordine dispari. In alcuni casi tali armoniche non danno luogo a gravi conseguenze, come accade per es. nell’alimentazione di motori; in tale caso infatti danno luogo soltanto a coppie frenanti di modesta entità e a perdite supplementari, peggiorando il rendimento della macchina che dovrà necessariamente essere sovradimensionata o declassata. Nei casi, invece, in cui è necessario un basso contenuto armonico bisogna ricorrere a una delle seguenti tecniche: a) filtraggio con filtri LC del tipo passa-basso, che risultano molto ingombranti e costosi date le basse frequenze in gioco; b) combinazioni delle tensioni di uscita di due, quattro o più i., opportunamente sfasati tra loro in modo da eliminare le armoniche più basse; c) uso di i. del tipo PWM.
Campi di applicazione. - I campi di applicazione degli i. sono i più diversi, ma sostanzialmente vengono impiegati nei casi in cui si vuole avere una sorgente di energia con tensione o corrente sinusoidale, di valore massimo regolabile, e a frequenza variabile con continuità. Per es., trovano applicazione nel caso in cui si vuole alimentare una rete di distribuzione di energia elettrica a partire da una sorgente continua (impianti di aerogenerazione, gruppi statici di continuità, connessioni fra reti alimentate con tensioni a frequenza diversa) o nelle alimentazioni di motori, da quelli di piccola potenza, che interessano la robotica, fino a quelli di grande potenza come nella trazione elettrica o negli impianti di pompaggio.
I. di fase

Dispositivo mediante il quale si ottiene da una tensione periodica un’altra tensione di uguale ampiezza e frequenza ma di fase opposta. Se lo spettro di frequenza della tensione data non è molto esteso, come i. di fase può essere usato semplicemente un trasformatore con secondario a presa centrale, come indica la fig. 5A: applicando una tensione, per es., sinusoidale ai morsetti a, b del primario, tra i morsetti c, d e d, e del secondario si hanno due tensioni di uguale ampiezza e in opposizione di fase. Di uso più generale, in quanto atti a essere usati anche per tensioni a largo spettro di frequenza, per es. tensioni impulsive, sono gli i. elettronici di fase, di cui un tipo, a transistore, è mostrato nella fig. 5B. Si tratta, in sostanza, della combinazione di un amplificatore con emettitore a massa e di un amplificatore con collettore a massa; la tensione d’entrata, applicata tra base e massa (morsetti a, b), dà luogo a due tensioni d’uscita in opposizione di fase, una nel circuito di collettore (morsetti c, d), l’altra nel circuito di emettitore (morsetti d, e); se i resistori di collettore e di emettitore sono ben dimensionati, le ampiezze delle due tensioni sono uguali e di poco minori dell’ampiezza della tensione d’ingresso.