
equilibramento
Meccanica
Operazione mediante la quale si rende equilibrato il sistema delle forze d’inerzia degli organi mobili delle macchine. L’e. si rende necessario per eliminare le azioni nocive che le forze d’inerzia non equilibrate inducono sugli organi di supporto (cuscinetti, basamenti ecc.), provocando vibrazioni che si trasmettono come disturbo per le persone, per le strutture ed eventualmente per il corretto funzionamento di altre macchine. Le forze d’inerzia possono essere dovute sia al moto rotatorio sia a quello alternativo di organi di macchine: il loro e. molto difficilmente si può realizzare in fase di costruzione sia per la forma degli organi stessi, che può essere imposta da necessità funzionali, sia per la presenza di inevitabili difetti costruttivi; esso si ottiene in pratica mediante l’aggiunta o la sottrazione di opportune masse.
Per i solidi di rotazione intorno a un asse l’e. consiste nel fare in modo che l’asse di rotazione sia asse centrale d’inerzia ( e. dinamico), in tal modo si annullano il risultante e il momento risultante delle forze d’inerzia (in questo caso centrifughe) e le sollecitazioni a cui sono sottoposti i vincoli dipendono esclusivamente dalle forze attive, come se il corpo fosse in quiete. La determinazione delle masse da aggiungere o da sottrarre ( masse equilibranti) si ottiene mediante le macchine equilibratrici. Un parziale e. ( e. statico) si ha quando ci si limita a far passare l’asse di rotazione per il baricentro, riducendo a zero il risultante delle forze d’inerzia (ma non il loro momento risultante); un tale e. è in genere sufficiente quando la dimensione assiale dell’organo rotante è limitata.
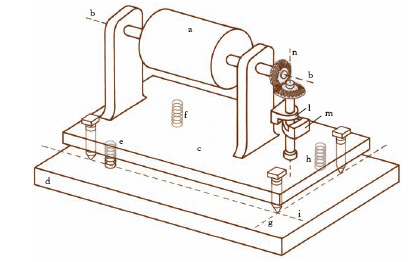
Le macchine equilibratrici servono per la determinazione, in modulo e direzione, dello squilibrio degli organi rotanti. Tale determinazione si fa misurando i valori delle grandezze fisiche indotte dal rotore sui cuscinetti della macchina equilibratrice, mediante i quali il rotore è sostentato. Le grandezze in oggetto possono essere forze oppure spostamenti. Nel primo caso i supporti delle macchine sono rigidi, nel secondo caso oscillanti. Poiché forze e spostamenti (nella direzione scelta per la misura) sono variabili nel tempo con leggi di tipo sinusoidale, si determina il loro valore massimo (ampiezza) e la loro posizione (fase) rispetto a un piano assiale di riferimento del rotore. Anziché a una misurazione diretta delle grandezze inerenti allo squilibrio, si può ricorrere a una valutazione indiretta, ottenuta con l’introduzione di uno squilibrio conosciuto, il quale viene fatto variare fino ad annullare lo squilibrio incognito. Un tipo di macchina equilibratrice è rappresentato schematicamente in fig. 1. Il rotore da equilibrare a, rotante intorno all’asse b, è montato sul banco c della macchina equilibratrice che poggia sulla base d mediante le molle e, f e i perni che individuano l’asse g, durante una prima prova, e mediante le molle f, h e i perni che individuano l’asse i, durante una seconda prova. Per effetto dello squilibrio del rotore il banco oscilla intorno agli assi g e i; spostando le masse di e. l e m, rotanti con la stessa velocità angolare di a intorno all’asse n, si varia l’intensità della loro azione finché si annulla l’oscillazione del banco. Tale intensità è leggibile su appositi quadranti e da essa si deducono gli squilibri del rotore. Talvolta, per effettuare l’e. di un organo senza spostarlo dalla sua sede, le misurazioni possono essere fatte senza montare il pezzo sulla macchina. Ci si limita a rilevare con trasduttori i valori degli spostamenti di alcuni punti della macchina e con appositi dispositivi le fasi. I calcoli da effettuare sui valori letti e la condizione della prova sono difficili, poiché s’ignorano, in particolare, le caratteristiche elastiche del sistema oscillante; si rinuncia quindi a effettuare tali calcoli e con apparecchiature particolarmente semplici ci si limita a valutare approssimativamente lo squilibrio e il suo angolo di fase, procedendo poi per tentativi all’aggiunta di masse equilibranti. Con tali apparati non viene generalmente effettuato l’e. dinamico, che può invece essere fatto con particolari macchine equilibratrici, del tipo di quella già riportata in fig. 1, le quali, operando sulla ruota smontata dall’autoveicolo e facendo uso di microprocessori, indicano, in alcuni secondi, la posizione e l’entità delle masse equilibratrici da applicare.
Aeronautica
L’e. delle superfici mobili, più specificamente detto compensazione, ha il duplice scopo di prevenire pericolose vibrazioni delle superfici mobili di governo (alettoni, equilibratore, timone) durante il volo e di agevolare l’azionamento delle suddette superfici. Il principio generale è quello di intervenire modificando i momenti delle forze di massa e delle forze aerodinamiche che determinano la rotazione delle superfici di governo attorno ai rispettivi assi di cerniera, riducendoli e addirittura annullandoli. L’ e. statico ha lo scopo di creare un equilibrio delle masse costituenti la superficie di controllo attorno all’asse di rotazione, con conseguente riduzione (o addirittura inversione) del momento delle forze d’inerzia relative alla superficie mobile. Viene ottenuto applicando opportuni contrappesi alla superficie mobile anteriormente al suo asse di cerniera; se l’asse di cerniera passa per il baricentro della superficie si ha compensazione totale; inoltre, se l’asse di cerniera è anche asse principale d’inerzia della superficie mobile, si ha l’ e. dinamico, e in tal caso la superficie stessa non tenderà né a ruotare né a oscillare, qualunque siano le sollecitazioni cui viene assoggettata nel volo. Si ha infine la compensazione aerodinamica quando il momento aerodinamico di cerniera viene ridotto o annullato mediante opportuni dispositivi (alette correttrici, compensatori a membrana, becchi di compensazione). In fig. 2 è visibile il becco di compensazione a del bordo di attacco di un timone di direzione, consistente in una estensione della superficie mobile anteriormente all’asse di cerniera b tale che le forze aerodinamiche agenti su di essa producano momenti di segno opposto a quello delle forze aerodinamiche che agiscono sulla superficie posteriore all’asse di cerniera.