
Spazio, esplorazione dello
Spazio, esplorazione dello
(App. IV, iii, p. 397; V, v, p. 89)
Scopo dell'attività spaziale, di qualunque tipo e a ogni livello, è far compiere una certa 'missione' assegnata a un 'carico pagante' (payload) appositamente progettato, costruito, o comunque specificato.
Le missioni sono dettate da esigenze di varia natura: agli inizi dell'era spaziale operativa (fine degli anni Cinquanta) gran parte di esse era dedicata a obiettivi di carattere scientifico, rivolti soprattutto alla misurazione di grandezze come la densità dell'aria negli strati più elevati dell'atmosfera, il campo gravitazionale terrestre, il campo magnetico terrestre ecc. Tali attività avevano però anche lo scopo di affinare e perfezionare le tecniche della navigazione spaziale. Non mancarono peraltro in quegli anni, in un certo senso pionieristici, anche imprese di portata notevole, quali il raggiungimento dei corpi celesti più vicini, dapprima da parte dei Sovietici, poi anche da parte degli Statunitensi.
Da allora, e con periodi di stasi dovuti a eventi eccezionali (come l'incidente dello Shuttle del 1986), si è assistito a missioni sempre più ambiziose, sia per gli obiettivi, sia per le dimensioni del carico pagante. Ha preso sempre più piede la necessità della 'commercializzazione' dello s., ossia la produzione di satelliti, sonde, sistemi aventi un notevole ritorno commerciale, anche se, negli ultimi anni, si è verificato un rinnovato interesse verso programmi spaziali scientifici, di costo imponente e con finanziamento pubblico, il cui numero e la cui dimensione avranno una forte accelerazione nel 21° secolo.
Questa tendenza storica ha fatto sì che si sviluppassero contemporaneamente due diverse professionalità in campo spaziale: la prima, che ha ormai assunto contorni precisi, viene denominata 'ingegneria del payload', mentre la seconda riguarda il veicolo spaziale vero e proprio ('carrozza' o bus, come si suol dire talvolta). Naturalmente non bisogna pensare che le due professionalità siano assolutamente estranee l'una all'altra, in quanto esse debbono necessariamente interagire in sede di progetto, definizione ed esercizio del veicolo nel corso della missione; resta, però, diversificato il tipo di professionalità.
In questa voce sono esposti i recenti sviluppi nella tecnologia dei veicoli spaziali e le iniziative in atto nell'esplorazione dello spazio. Nella voce satelliti artificiali di questa Appendice è illustrata, invece, l'evoluzione dell'ingegneria del payload, con particolare riguardo agli impieghi per il telerilevamento ambientale, per la meteorologia e per la navigazione satellitare.
Lo sviluppo della tecnologia spaziale attraverso i passati decenni può essere seguito agevolmente nelle precedenti Appendici. Le problematiche della navigazione spaziale e delle traiettorie sono esposte nella voce navigazione: Navigazione spaziale (App. III, ii, p. 215; IV, ii, p. 555; V, iii, p. 632). Notizie sui satelliti, sulle operazioni di lancio, sulle caratteristiche e sulla dinamica orbitale vengono fornite nella voce satelliti artificiali (App. III, ii, p. 670; IV, iii, p. 274; V, iv, p. 647). L'esplorazione dello s., le principali missioni e i risultati conseguiti, anche con riguardo ai pianeti del Sistema solare, sono trattati oltre che alla voce navigazione: Navigazione spaziale, sotto la voce spazio, esplorazione dello nelle precedenti Appendici. Le caratteristiche delle stazioni spaziali vengono illustrate nella voce spaziale, stazione (App. V, v, p. 81). L'evoluzione dei vettori utilizzati per il lancio dei satelliti e dei veicoli spaziali è stata trattata nelle voci missile (App. IV, ii, p. 484), razzo (IV, iii, p. 153) e spaziali, vettori (V, v, p. 84). *
La tecnologia spaziale agli inizi del terzo millennio
di Paolo Santini
L'ingegneria del veicolo spaziale ha subito grandi progressi da quando, nel 1957, il primo oggetto fabbricato dall'uomo è stato lanciato nello s., con una continua modifica e moltiplicazione dei tipi di architettura dei satelliti, delle astronavi e delle loro dimensioni. Peraltro, negli ultimi tempi si è affermata una certa tendenza alla riduzione delle dimensioni degli oggetti, ove possibile, a causa dell'aumento dei costi: la progettazione, cioè, va adattata non solo alle necessità, ma anche alle disponibilità di bilancio per le missioni da svolgere. Infine, specialmente negli ultimi tempi, sempre maggiori restrizioni sono determinate da rischi ambientali (per es., da quelli derivanti dall'impiego di materiali inquinanti o radioattivi nei sistemi propulsivi). Si è pure assistito, nel corso dei decenni dell'era spaziale, a una sempre maggiore capacità di manovra, legata alla crescente esperienza acquisita.
La dinamica del volo spaziale
Lo studio del movimento di un corpo nello s. prende il nome di dinamica (o meccanica) del volo spaziale, e presenta due aspetti fondamentali e complementari: il moto del corpo nel suo insieme, detto anche moto del centro di massa o traiettoria del veicolo spaziale; il moto del corpo intorno al suo centro di massa, o moto di assetto.
Nulla di sostanziale vi è da aggiungere a quanto detto nelle precedenti Appendici per ciò che riguarda le fasi di ascesa in orbita, salvo la diversa temporizzazione associata ai sistemi del tipo Shuttle. Anche lo studio della fase orbitale non ha riservato negli anni più recenti problemi di grande rilievo; sono però aumentate le necessità di effettuare orbite di trasferimento, come si vedrà più oltre a proposito dell'orbita geostazionaria. Invece la grande estensione dei viaggi interplanetari e la programmazione di missioni sempre più ambiziose hanno portato a una grande diffusione delle tecniche di flyby - note anche come calcio planetario o effetto fionda (v. navigazione: Navigazione spaziale, App. V) - che consistono sostanzialmente nell'utilizzare il campo gravitazionale di un pianeta passandogli vicino e ottenendo un aumento dell'energia cinetica della sonda, a spese di quella del pianeta che, naturalmente, è ben lungi dal risentirne apprezzabilmente.
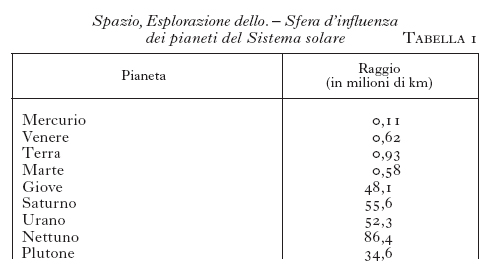
Com'è noto, ogni pianeta ha una sua sfera d'influenza, definibile come quella regione dello spazio in cui l'effetto del pianeta è predominante e che varia entro limiti non vicinissimi a seconda della distanza del pianeta dal Sole (fig. 1). In tab. 1 sono indicati i valori medi dei raggi delle sfere di influenza dei pianeti del Sistema solare. All'interno di tale sfera il moto di un corpo attratto dal pianeta può essere considerato non influenzato dagli altri corpi celesti. Quando il veicolo spaziale è nella sfera d'influenza del generico pianeta Pj, la sua traiettoria relativa a Pj è, con ottima approssimazione, una iperbole, le cui caratteristiche sono determinabili per mezzo delle equazioni fondamentali della meccanica celeste (v. satellite artificiale: Dinamica orbitale, App. IV), e in particolare del cosiddetto problema dei due corpi ristretto, che studia il moto di due corpi di cui uno (in questo caso la sonda) è di massa trascurabile rispetto all'altro (in questo caso il pianeta). Quest'ultimo non risente quindi, praticamente, delle forze gravitazionali esercitate dal primo; il suo moto può quindi considerarsi conosciuto, o addirittura nullo, se il pianeta viene assunto come riferimento. La traiettoria della sonda rispetto al pianeta è una conica kepleriana, di cui il pianeta occupa uno dei due fuochi (fuoco pieno) o l'unico esistente (nel caso puramente teorico di traiettoria relativa parabolica). L'equazione polare della conica è la ben nota
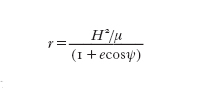
dove i simboli r, ψ sono illustrati in fig. 1, e dove, nel caso iperbolico, si ha eccentricità e>1; con μ si è indicata la costante gravitazionale del pianeta, e con H il momento della quantità di moto per unità di massa (prodotto della distanza della sonda S da Pj, per la componente tangenziale della velocità relativa).
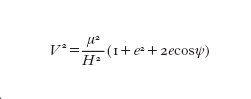
Dall'equazione precedente si ottiene attraverso lunghi, ma elementari, passaggi algebrici l'espressione della velocità:
formula [
2]
Queste relazioni sono valide per ogni tipo di conica: nel caso iperbolico, facendo tendere r all'infinito (operazione priva di senso nel caso ellittico), si trova il valore limite cosψ₀=−1/e dell'angolo ψ, che poi rappresenta l'inclinazione degli asintoti in fig. 1; sostituendo questo valore nella [2] si ottiene il valore della velocità all'infinito che prende il nome di velocità di eccesso iperbolico (VEI), la cui intensità V∞ è fornita da:
formula [

3]
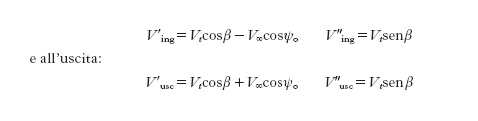
È la VEI in intensità e direzione che definisce l'iperbole, insieme alla posizione del punto in cui la sonda entra nella sfera d'influenza del pianeta. Il pianeta è a sua volta in movimento con velocità Vt nota (quella di rivoluzione intorno al Sole) lungo la sua orbita, che in prima approssimazione, tenuto conto della brevità del passaggio, può essere considerata rettilinea. Si indica con β l'angolo che la direzione di Vt (cioè in sostanza l'orbita) forma con l'asse dell'iperbole.
Per la valutazione della variazione di energia cinetica della sonda è necessario calcolare le due componenti della sua velocità, lungo l'asse dell'iperbole e normalmente a esso, all'ingresso della zona d'influenza
Il guadagno di energia cinetica per unità di massa della sonda è ottenuto come differenza dei quadrati delle velocità di uscita e di ingresso; rielaborando opportunamente le equazioni precedenti, si ottiene:
2VtV∞cosβ
ΔE=----- formula [4]
RV∞²
1+--
μ
in cui R è la distanza minima del passaggio dalla sonda (segmento PjQ in fig. 1).
L'aumento (o la diminuzione) di energia cinetica ottenibile con il flyby dipende, quindi, come era facilmente prevedibile, dal pianeta sorvolato (attraverso la costante planetaria μ), dalla velocità del pianeta Vt e dalle condizioni di sorvolo descritte dalla VEI e dall'angolo β. È evidente come il calcio planetario possa essere usato per ritardare (cosβ⟨0) o accelerare (cosβ>0) la sonda: quest'ultima applicazione è però praticamente l'unica attualmente utilizzata, in quasi tutte le missioni interplanetarie, perché essa consente un forte risparmio energetico e la conseguente possibilità di rinunciare a sistemi propulsivi inquinanti come quelli utilizzanti il plutonio, come già si è fatto e si sta facendo sempre più di frequente. Il valore massimo di ΔE si ha quando l'asse dell'iperbole è coincidente con la direzione dell'orbita planetaria (β=0).
Fisicamente si osserva come la variazione di energia cinetica sopra descritta derivi dal fatto che, a causa della conservatività delle forze agenti, la VEI non cambia tra entrata e uscita in modulo mentre cambia in direzione, una volta sottraendosi dalla velocità orbitale del pianeta e un'altra sommandosi a essa.
È possibile tradurre la [4] in un grafico (fig. 2) che mostra l'aumento di energia cinetica in funzione di V∞ per i vari pianeti nel caso limite di passaggio pari al raggio del pianeta e per β=0. Per ciascuno dei pianeti esaminati si ha un aumento nullo per VEI nulla, che corrisponde a immobilità della sonda al limite della zona d'influenza del pianeta: questa conclusione paradossale deriva dall'aver approssimato la velocità al limite della zona d'influenza come VEI, che è invece la velocità all'infinito. Al crescere di V∞ l'aumento di energia cinetica raggiunge un massimo, poi decresce e si annulla di nuovo per velocità infinita: questo effetto limite si produrrebbe nel caso di conica degenere, in cui l'iperbole diventa una retta, e quindi non esiste più l'effetto di incurvamento della traiettoria prima descritto. Come si vede in fig. 2, i pianeti più interessanti dal punto di vista delle possibilità offerte sono Giove, Venere e la Terra; Marte fornisce aumenti comparativamente modesti, ed è per questo che il flyby a esso relativo non viene applicato in pratica, mentre quello di Venere è assai frequente, nonostante le difficoltà che esso presenta, come si vedrà a proposito della missione Cassini. La Terra offre ottime possibilità, ed è sempre più utilizzata, anche se questo implica prima l'allontanamento da essa e poi il ritorno nelle sue vicinanze (come nelle missioni Cassini e Giotto). Quindi la tecnica di flyby è estremamente vantaggiosa, in alcuni casi addirittura irrinunciabile.
Va osservato che le considerazioni ora svolte sono assai elementari perché non tengono conto di molti fattori, come per es. la variabilità della velocità del pianeta e, in linea subordinata, la presenza di perturbazioni. Va inoltre rilevato che la tecnica stessa obbliga certamente all'allungamento temporale della missione, e alla necessità di inoltrarsi in zone assai distanti del Sistema solare, con manovre che provocano difficoltà di tipo tecnologico.
Manovre orbitali
Altre manovre che hanno assunto ormai carattere di routine sono quelle di docking e rendezvous (v. satellite artificiale: Dinamica orbitale, App. IV) in orbita, oggi essenziali per la costruzione e l'esercizio delle grandi stazioni spaziali, sempre più largamente impiegate. All'inizio dell'era spaziale queste manovre erano considerate assai rischiose, e ci sono voluti molti anni prima che fosse acquisita con sicurezza la tecnica a esse relativa, essendo richiesta una notevole precisione per la loro effettuazione. Così pure va ricordato il cambiamento di orbita che rappresenta peraltro sempre una manovra molto onerosa e, quando possibile, da evitare, o almeno da ottimizzare.
Il moto d'assetto
Per il moto d'assetto è richiesta una sempre maggiore precisione di puntamento verso gli obiettivi esterni e di stabilizzazione, per cui i sistemi di controllo formano oggi parte integrante della tecnologia del veicolo.

Il controllo d'assetto del moderno veicolo spaziale presenta nuovi problemi, associati alla sempre maggiore sofisticazione del veicolo stesso. Mentre i principi fondamentali e gli organi di controllo sono quelli tradizionali (v. ancora satellite artificiale: Controllo d'assetto, App. IV), le realizzazioni pratiche hanno assunto caratteristiche sempre più complicate e hanno portato al concetto di dinamica e controllo dei sistemi multicorpo, in cui si hanno molti elementi che occorre controllare simultaneamente tenendo conto delle mutue interferenze dinamiche. Può dare una semplice idea della difficoltà del problema lo schema della nuova stazione spaziale internazionale Alpha (fig. 3), da cui appare il grande numero di corpi interessati: molti problemi derivano anche dalle numerose nazioni coinvolte nel progetto, ciascuna delle quali ha una sua mentalità progettuale e costruttiva.
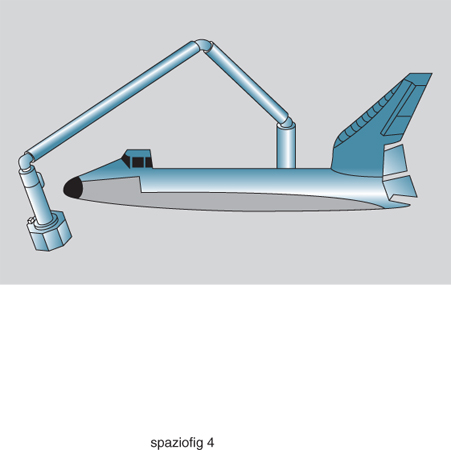
Un problema analogo si presenta per il caso dei manipolatori meccanici, elementi che sporgono dall'interno di un veicolo come lo Shuttle, e che catturano corpi vaganti nello spazio o rilasciano satelliti che vengono messi in orbita con la velocità del veicolo. Un esempio è rappresentato in fig. 4, in cui il manipolatore è destinato alla cattura anche di satelliti stabilizzati a spin (cioè messi in moto di rotazione intorno a un proprio asse). A causa della grande precisione necessaria, il controllo deve tener conto della flessibilità strutturale.
Controllo di posizione e di assetto
La necessità di controllare la posizione di un satellite ha certamente grande importanza per molti tipi di missioni, ma è fondamentale per il caso dell'orbita geostazionaria. In quest'ultima infatti la traiettoria relativa alla Terra si riduce a un punto, definito unicamente dalla longitudine, in quanto la latitudine nominale è zero, e la distanza dal centro della Terra è esattamente determinata, e pari a 6,62548 raggi terrestri. Ma le perturbazioni (v. satellite artificiale: Dinamica orbitale, App. IV) modificano l'orbita del satellite rispetto a un sistema di riferimento inerziale, e quindi lo spostano dalla sua posizione nominale rispetto alla Terra. Da questo punto di vista le perturbazioni più importanti sono quelle rappresentate dall'effetto della radiazione solare, che agisce in modo simile alla resistenza aerodinamica e risente quindi del rapporto massa/area; per valori di questo rapporto dell'ordine di 0,01 kg/m² gli effetti cominciano a farsi sentire. Vi è poi la perturbazione lunisolare che ha principalmente l'effetto di spostare il satellite normalmente all'orbita, e che produce quindi una variazione nella sua inclinazione, che dovrebbe essere zero. Ma la causa di errore più forte è quella associata alle perturbazioni agenti nel piano dell'orbita e legata alle armoniche tesserali (Cornelisse et al. 1979) del campo gravitazionale terrestre; la più intensa di esse è la J₂₂ che ha una intensità di circa un milionesimo di quella newtoniana, e varia naturalmente con la posizione. L'espressione analitica del potenziale Φ a esso relativo è
formula [
5]
in cui r è la distanza dal centro della Terra, ϕ è la latitudine, P₂(²) è la funzione di Legendre di ordine 2 e rango 2, ω è la longitudine geografica, ωr≈̳12°; il coefficiente J₂₂, che dà una misura dell'entità della perturbazione, vale 10⁻⁶.
Nonostante la sua estrema piccolezza, l'effetto dell'armonica è assai importante perché, dipendendo da tutte e tre le coordinate, essa provoca accelerazioni perturbative secondo le tre direzioni, e in particolare tangenzialmente al cerchio equatoriale; tale perturbazione, che ha una componente periodica e una secolare (che cresce cioè col tempo), tende a spostare il satellite geostazionario indefinitamente dalla sua posizione nominale. L'accelerazione da essa prodotta varia a seconda della posizione sull'equatore da un minimo di circa 4 a un massimo di circa 8 miliardesimi della gravità newtoniana.
Lo spostamento longitudinale (drift) causato da queste accelerazioni si traduce in uno spostamento rispetto alla posizione nominale che va contenuto entro limiti prefissati e tollerabili (di solito 0,1°) e che può avvenire nel senso delle longitudini crescenti o decrescenti, a seconda della posizione geografica, perché è da essa che dipende il segno delle forze perturbative. Si ricorre allora a sensori di terra capaci di rilevare e misurare lo spostamento, inviando a bordo un segnale quando si raggiunge il valore limite; con esso si attiva un micropropulsore a idrazina che fornisce un impulso capace di riportare il satellite nella posizione nominale. A questo punto ha inizio una nuova fase di drift, e il ciclo (denominato ciclo limite) si ripete indefinitamente.
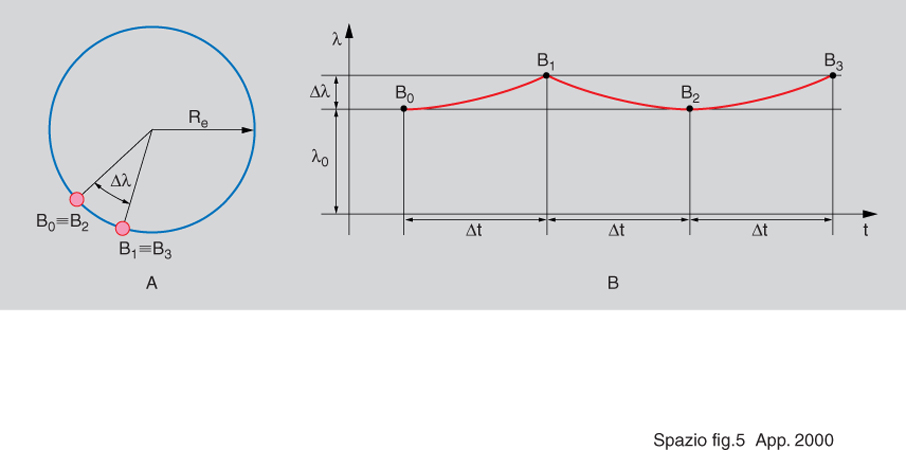
La manovra da effettuare è illustrata in fig. 5. Nella fig. 5A è rappresentato il cerchio equatoriale corrispondente al raggio geosincrono Re ed è indicata la posizione nominale B₀ del satellite, che supponiamo si trovi nella zona in cui il drift è positivo, cioè nel senso crescente della longitudine (verso E). La stessa posizione è riportata nel diagramma della fig. 5B, che fornisce le longitudini in funzione del tempo: con λ₀ è indicata la longitudine nominale. Per effetto delle forze associate a J₂₂ il satellite si sposta gradualmente, e dopo un certo tempo Δt raggiunge la posizione B₁ corrispondente al massimo drift tollerato Δλ. Allora viene azionato il micropropulsore di controllo, il quale fornisce l'impulso che tende a invertire il moto (come si vede in fig. 5B dalla diminuzione di λ); ma continuano anche ad agire le forze perturbatrici, per cui il satellite raggiunge B₂ coincidente con B₀ (cioè con la posizione nominale) e quindi ricomincia il drift. Questo movimento si ripete indefinitamente. È possibile determinare l'intensità dell'impulso da applicare nei punti B₀, B₂,... ecc., in modo da ottenere le caratteristiche desiderate del ciclo limite. Per es., per un satellite nella posizione a 160° E si ha un'accelerazione di 5,3 miliardesimi di g (con g accelerazione di gravità), che richiede un impulso da parte del micropropulsore di controllo capace di produrre una variazione di velocità di 0,25 m/s per 0,1° di tolleranza; in queste condizioni si può calcolare in 54 giorni il periodo del ciclo limite che viene a instaurarsi. Questo, per un satellite di 2 t equivale a un impulso totale di 50 kg s, e quindi, con un impulso specifico di 300 s, a circa 1/6 di kg di consumo di propellente (idrazina) ogni due mesi.
Una manovra sostanzialmente analoga va effettuata per il controllo della latitudine: qui le forze perturbatrici principali sono quelle dovute all'effetto gravitazionale lunisolare, e il controllo viene effettuato mediante impulsi diretti normalmente al piano equatoriale. Il consumo è generalmente più elevato, da 20 a 50 volte quello necessario per il controllo in longitudine.
Sollecitazioni meccaniche
Come in qualunque altro campo dell'ingegneria, la progettazione di un veicolo spaziale va preceduta dallo studio dell'ambiente, ossia delle condizioni in cui il corpo si verrà a trovare nel corso della sua vita operativa. Col termine 'ambiente' (traduzione impropria del termine ingl. environment, ormai invalso nel settore spaziale) si intendono anche le condizioni dinamiche conseguenti alle azioni interne ed esterne.
Per la progettazione del veicolo spaziale è necessario anzitutto conoscere le sollecitazioni derivanti dalle condizioni del volo, la costituzione delle strutture del veicolo stesso e la verifica che il cimento a esse relativo sia sopportabile. Nel caso spaziale occorre accertare che le tensioni interne non superino quelle ammissibili secondo vari criteri e definizioni dettati dalla meccanica della frattura; ma, a differenza di altri campi dell'ingegneria, è anche necessario assicurarsi che le deformazioni ottenute non siano eccessive, in modo che il veicolo possa compiere la missione desiderata. Un classico esempio è quello offerto dalle strumentazioni spettrometriche, per le quali è necessario garantire precisioni di puntamento dell'ordine del milionesimo di millimetro. A titolo d'esempio, va ricordato il telescopio Hubble, in cui un errore di progettazione delle lenti obbligò a una missione aggiuntiva estremamente costosa e complicata.
Per tali operazioni di verifica e di progettazione è necessario conoscere anzitutto il tipo di sollecitazione, e in particolare il suo spettro, ossia la distribuzione F(ω) delle forze eccitatrici in funzione della frequenza ω; va poi indicata la funzione di trasferimento X(ω), anch'essa dipendente da ω. La risposta in frequenza della struttura alle sollecitazioni dell'ambiente è allora data da
formula [
6]
Va notato che le quantità R(ω), F(ω) introdotte hanno carattere vettoriale (rappresentano cioè non una grandezza, ma un insieme di grandezze rappresentabili con un vettore a più componenti). In quanto alla matrice di trasferimento X(ω), la sua determinazione va effettuata sia in forma analitica (attraverso i moderni metodi di calcolo numerico agli elementi finiti) sia in forma sperimentale; questa fase di 'qualificazione dinamica' è un'irrinunciabile esigenza della progettazione. Particolare attenzione deve essere rivolta a far sì che le zone dello spettro a maggiore intensità non si presentino in corrispondenza delle frequenze proprie della struttura, per evitare pericolosi fenomeni di risonanza meccanica.
Fonti di sollecitazione dinamica

Fenomeni di vibrazioni e di dinamica strutturale sono presenti praticamente in tutte le fasi del volo spaziale. Alla partenza si hanno forti sollecitazioni acustiche legate sia all'azione dei propulsori sia all'effetto delle forze aerodinamiche, in forma e misura non troppo diverse da quelle relative a un moderno velivolo di linea. Le fasi in cui tali sollecitazioni assumono i valori più elevati si hanno negli istanti del lift-off (cessazione della spinta) e del passaggio attraverso la zona transonica. Va notato che le sollecitazioni acustiche non sono solo trasmesse direttamente alla struttura del veicolo spaziale, ma anche attraverso la struttura del razzo che, a sua volta eccitata, produce un campo acustico che agisce sulle strutture dell'astronave. Per gli scopi della progettazione è necessario conoscere, come già detto, oltre alle massime intensità della sollecitazione acustica, anche il suo spettro. Per es., la fig. 6 mostra un tipico spettro di frequenza del rumore r (in dB) relativo all'Ariane 4, da cui appare evidente come la zona più pericolosa sia quella compresa nel campo da 100 a 1000 Hz.
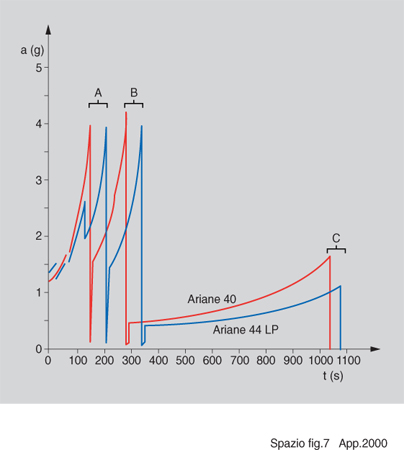
Assai più elevate e pericolose sono le sollecitazioni derivanti dalla componente stazionaria (cioè non vibratoria) associata alla spinta e alle altre forze agenti sul vettore e, di conseguenza, sulla sonda spaziale o sul satellite in esso contenuti. La fig. 7 rappresenta un tipico andamento temporale dell'accelerazione per due versioni di Ariane 4 durante le fasi del lancio. Vi si nota un forte picco in corrispondenza del distacco degli stadi, dovuto al fatto che la spinta è costante durante il funzionamento dello stadio, mentre la massa va continuamente decrescendo a causa del combustibile bruciato. Immediatamente dopo, cessando la spinta, l'accelerazione cade praticamente a zero.
I picchi di accelerazione indicati in fig. 7 possono talvolta raggiungere valori tanto più elevati quanto minori sono le dimensioni del razzo. Si può così giungere a picchi di circa 15 g (con g accelerazione di gravità) per razzi sonda, mentre per es. per lo Shuttle si registrano valori non superiori a 3 g.
Sempre durante la fase di lancio si verificano fortissime accelerazioni o decelerazioni che assumono il carattere di veri e propri urti, negli istanti di separazione degli stadi, separazione che viene provocata assai spesso attraverso l'uso di bulloni esplosivi. In questi casi si giunge a valori estremamente elevati dell'accelerazione (nel caso dell'Ariane fino a 2000 g), peraltro per durate assai brevi, dell'ordine di pochi millisecondi, per cui la struttura, se opportunamente progettata, può sopravvivere.
In orbita i carichi statici sono generalmente assai piccoli; non va infatti dimenticato che si è in condizioni di 'microgravità' (v. microgravità, App. V), in cui la gravità effettiva è praticamente nulla. Possono invece raggiungere valori assai notevoli i carichi derivanti da eventi dinamici. È impossibile procedere a un'esposizione sistematica e unificata di tali eventi per ogni tipo di veicolo spaziale. Ci limitiamo quindi a considerare il caso della stazione spaziale Mir, per la quale si dispone di un numero sufficiente di dati teorici e sperimentali: per la stazione, in servizio dal 1986, era stata prevista una vita orbitale di cinque anni, ma in seguito ne è stata prolungata l'esistenza, effettuando apposite verifiche annuali. Le fonti principali di sollecitazione dinamica nella Mir derivavano da: a) docking, ovvero l'aggancio da parte di unità o moduli in arrivo; b) operazioni dei sistemi di controllo; c) addestramento dell'equipaggio.
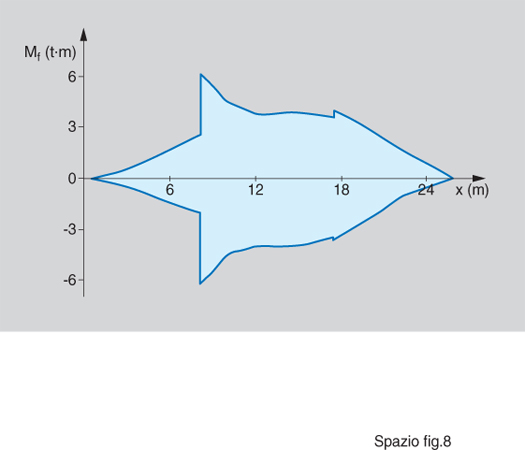

Per quando riguarda il primo tipo di carichi, la fig. 8 mostra l'inviluppo dei massimi momenti flettenti lungo l'asse della stazione prodotti dal docking con la Soyuz (il grafico rappresenta, cioè, il valore più elevato del momento flettente raggiunto in ogni particolare sezione, misurata sull'asse orizzontale, ciascuna indipendentemente dal tempo in cui esso avviene). Come si vede, il massimo del valore è raggiunto a circa 1/3 della lunghezza ed è di 6 t∙m, pari a circa il 70÷80% di quello massimo ammissibile di progetto. Per il secondo tipo di carico, la fig. 9 mostra l'andamento temporale del sovraccarico nella sezione di base derivante da un cambiamento di assetto della stazione richiesto da esigenze operative. Infine, la terza sorgente di sollecitazione è provocata dai movimenti del personale di bordo, dalle esigenze della loro preparazione e soprattutto dal calpestio e dalle uscite ed entrate nella cabina.
Negli ultimi anni ha assunto maggiore importanza il problema delle 'microvibrazioni'. I futuri laboratori, piattaforme e satelliti scientifici richiederanno sorgenti sempre più ridotte di carichi dinamici associati con l'ambiente spaziale. Peraltro, l'ambiente di lavoro dei veicoli spaziali è tutt'altro che calmo, essendo contaminato da sorgenti di rumore di varia natura; queste microsorgenti, per quanto piccole, possono dar luogo a risposte di notevole ampiezza, anche a causa di fenomeni di risonanza. Inoltre sono le stesse qualità dinamiche della struttura che variano passando dalle condizioni a terra a quelle in orbita; l'effetto dell'ambiente spaziale è tuttavia abbastanza piccolo, almeno alle basse frequenze. Destano maggiore preoccupazione le deformazioni prodotte dalle microvibrazioni che portano alla perdita di allineamento degli apparecchi ottici; esse, anche se di piccolissima intensità, a causa delle enormi distanze rispetto ai corpi celesti sotto osservazione, provocano forti errori di valutazione nelle dimensioni trasversali degli oggetti osservati (nebulose, ammassi stellari ecc.). A tale fenomeno si può tentate di ovviare solo attraverso un'accurata progettazione delle strutture del veicolo, in modo da ridurre la risposta dinamica nel campo di frequenze più pericoloso.
I problemi termici
Altra fonte di preoccupazione per i progettisti, nella fase di lancio, è costituita dai fenomeni di riscaldamento: per questo, gli stadi superiori di alloggiamento del carico pagante vanno protetti attraverso appositi scudi termici, o fairings. Tali preoccupazioni non sono tanto di natura strutturale quanto, soprattutto, relative al pericolo che un forte riscaldamento possa danneggiare le delicate strumentazioni elettroniche del carico pagante. Sono i fairings ad assorbire direttamente le quantità di calore provocate dall'attrito dell'aria, mentre il carico utile subisce riscaldamenti assai modesti, trovandosi all'interno del razzo. I fairings vengono abbandonati a una certa quota e il carico utile è allora a contatto direttamente con l'atmosfera (a queste quote l'aria è però assai rarefatta, per cui l'aumento di temperatura risulta molto contenuto).
Il volo orbitale pone problemi termici assai importanti, che nascono dall'equilibrio delle quantità di calore che agiscono sul satellite. Il bilancio termico di un satellite che orbita intorno alla Terra risulta dalle seguenti sorgenti di calore: radiazione solare diretta, albedo (radiazione prodotta dal Sole e riflessa dai corpi vicini, in particolare dalla Terra), energia termica irradiata direttamente dai pianeti, calore generato dal funzionamento dei sistemi di bordo; la somma di queste quantità di calore viene reirradiata nello s., oltre a essere ridistribuita all'interno della struttura attraverso fenomeni di conduzione. In prima approssimazione, si può comunque ritenere che le uniche quantità da prendere in considerazione siano quella solare e quella dovuta alla reirradiazione. La prima è denominata costante solare e vale, nelle vicinanze della Terra, circa 1400 W/m²: essa varia circa come l'inverso del quadrato della distanza dal Sole, e può quindi essere considerata costante lungo un'orbita terrestre, mentre ben diverso è il discorso nel caso di viaggi interplanetari. La quantità di calore Qe che entra nel corpo è fornita dalla relazione Qe=αQ, dove α è un coefficiente compreso tra 0 e 1, denominato assorbività, che indica quale frazione di calore incidente Q viene assorbita dalla superficie: il suo valore numerico dipende esclusivamente dalla natura della superficie, ma varia anche con la sua temperatura.
Per il calore reirradiato è valida la legge di Stefan-Boltzmann
formula [
7]
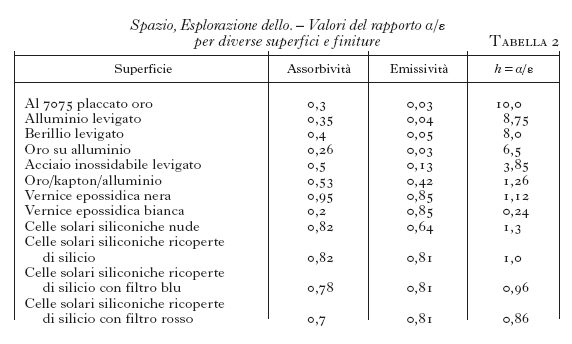
in cui T è la temperatura termodinamica della superficie radiante della sonda, considerata uniforme, σ è la costante di Boltzmann, S è la superficie radiante, mentre ε è il coefficiente di irradiazione (emissività), compreso tra 0 e 1, che dipende pure esclusivamente dalle caratteristiche fisiche della superficie e dalla sua temperatura. L'uguaglianza delle due quantità di calore Qe e Qu consente di ottenere la temperatura di equilibrio radiativo (in generale si fissa tale temperatura per le esigenze del condizionamento e si determina il valore necessario del rapporto h=α/ε). Va notato che tale rapporto è estremamente variabile. Riportiamo in tab. 2 i valori per alcuni materiali di uso comune nella tecnica spaziale.
Questa elementare analisi può dare solo un'idea dei parametri che influenzano l'equilibrio termico; va infatti tenuto presente che le quantità di calore che entrano nel corpo sono variabili nel tempo a causa della variabilità della posizione del satellite nell'orbita e della durata delle fasi di eclisse (quelle cioè che si hanno quando la Terra si interpone tra il Sole e il satellite), e sono anche variabili da un punto all'altro della superficie. Per questo motivo il controllo termico è da sempre uno dei punti più importanti del progetto dei veicoli spaziali. Vanno distinti due tipi fondamentali di controllo, passivo e attivo. Il controllo passivo consiste semplicemente nell'adozione di un opportuno valore del rapporto h, che viene generalmente fatto variare da un punto all'altro in modo da avere la distribuzione di temperatura desiderata, anche in relazione alla variabilità dei coefficienti termici. Si hanno sistemi termici a riflessione (basso α, alto ε; termine del resto inappropriato, perché non di riflessione si tratta, ma di reirradiazione) e ad assorbimento; e si hanno assorbitori solari (basso α, alto α) che vengono utilizzati nelle parti del veicolo spaziale in cui è necessario tenere elevata la temperatura. Meritano speciale attenzione le celle solari, la cui efficienza decresce fortemente con l'aumento di temperatura; per esse, peraltro, molto del calore non trasformato in energia elettrica viene reirradiato dalla faccia posteriore del pannello su cui la cella è montata; inoltre il problema è fortemente semplificato nel caso di stabilizzazione a spin, per cui il pannello non è perennemente esposto al Sole. Un altro sistema per ridurre questo tipo di problemi è costituito dall'adozione di filtri che assorbono l'energia associata alle lunghezze d'onda non trasformabile in energia elettrica (protezioni multistrato).
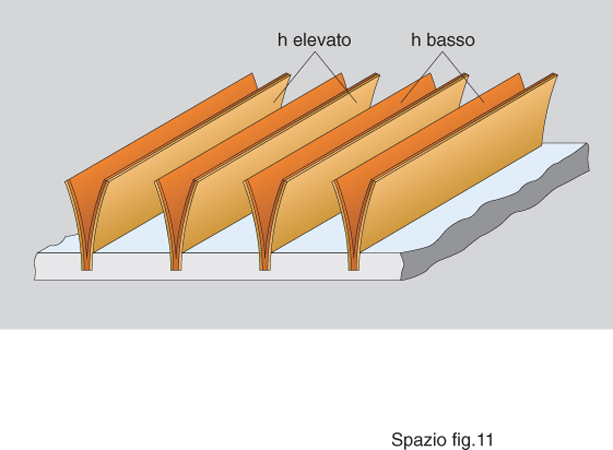
I sistemi di controllo attivo sono basati sulla variazione, ottenuta meccanicamente o termicamente, della superficie di parti della struttura. A titolo puramente esemplificativo riportiamo in fig. 11 un sistema in cui il corpo ha un elevato valore di h: su di esso è montato un sistema di alette generalmente chiuse, la cui superficie interna ha invece un forte valore del suddetto parametro. Quando la temperatura raggiunge limiti inaccettabili, le alette si aprono; così si modifica il valore di α/ε, aumenta contemporaneamente la superficie esposta e la temperatura si riduce.
Effetto dell'ambiente esterno sui materiali
Le condizioni di temperatura, di pressione, di microgravità delle zone in cui si svolge la missione spaziale hanno grande importanza sul comportamento dei materiali e sulle loro proprietà fisiche.
Un primo fenomeno è quello della sublimazione, che colpisce le superfici esterne di un veicolo spaziale quando la pressione esterna raggiunge valori dello stesso ordine di grandezza della tensione di vapore propria; si tratta di valori assai bassi (10⁻¹⁵÷10⁻¹¹ Pa), ma che sono effettivamente raggiunti in alcune fasi del volo; le velocità di sublimazione sono assai variabili, ma raggiungono valori talvolta di 2 μm per anno: quantità assai modeste e incapaci di provocare problemi derivanti da riduzione di resistenza strutturale, ma, piuttosto, di diminuire l'efficienza ottica e/o elettrica delle superfici della strumentazione circostante su cui le particelle volatilizzate vengono a depositarsi. Un altro pericolo è rappresentato dall'ossigeno atomico, che ha una concentrazione assai elevata alle quote LEO (Low Equatorial Orbit) e che danneggia i materiali (specialmente l'argento), sia per effetto chimico sia per effetto cinetico legato alla elevata velocità delle particelle. Altri effetti, in parte dannosi in parte favorevoli, derivano dall'esposizione al vuoto e alla radiazione, e sono ampiamente studiati in letteratura.
Configurazioni progettuali. - A causa della grande varietà dei tipi di missione, non è possibile una descrizione unificata della configurazione di un veicolo spaziale. Caratteristiche comuni sono: la leggerezza delle strutture, che ha portato alla grande diffusione dei metodi di ottimizzazione strutturale; l'affidabilità; la robustezza, cioè la capacità di sostenere i carichi dinamici che la sollecitano; la rigidezza, cioè la capacità di deformarsi in misura limitata, o almeno controllata. Ci si limita a fornire solo alcuni esempi.
La struttura della sonda Giotto - il cui progetto fu determinato in larga misura dalla necessità di protezione contro le particelle di materia appartenenti alla cometa che la sonda avrebbe incontrato sul suo cammino, a velocità estremamente elevate (fino a 60 km/s) - è formata essenzialmente da un grosso tubo centrale a cui sono attaccati i dischi di alloggiamento delle strumentazioni scientifiche. L'adattatore conico di base collega la sonda vera e propria al lanciatore.
La struttura del telescopio Hubble (v. spazio, esplorazione dello: Il telescopio spaziale Hubble, App. V) deriva dalla necessità, sopra accennata, di riuscire a separare le immagini di due oggetti celesti visti da Terra sotto un angolo di 0,1″ (che, alla distanza di 4 anni-luce, corrisponde a una distanza effettiva dei due oggetti di 2,4 miliardi di km). Questa esigenza ha condotto all'uso intensivo di materiale speciale (grafite epossidica) per la struttura cilindrica principale, della lunghezza di 5 m e della larghezza di circa 3 m. La situazione è poi ulteriormente complicata, come si è visto, dalla presenza delle fasi di eclisse che provocano deformazioni termiche variabili, e che si è cercato di compensare con speciali sistemi di controllo.
Il futuro dei sistemi di propulsione spaziale
Rispetto ai sistemi tradizionali di propulsione, di cui si è parlato nelle precedenti Appendici alle voci missile (App. IV e V), razzo (App. IV) e spaziali, vettori (App. V), si stanno facendo strada e si vanno consolidando alcune soluzioni innovative. La propulsione chimica (e in particolare quella associata ai propergoli chimici) ha ormai raggiunto il limite tecnologico massimo e probabilmente l'unica innovazione che si intravede è quella dei condotti di scarico autoadattanti, che variano la sezione e la configurazione a seconda delle esigenze di spinta. Dovrebbe essere fondamentale l'impiego dei nuovi materiali e componenti intelligenti, costituiti da sensori e attuatori piezoelettrici o a memoria di forma. La propulsione ibrida richiede spese d'investimento troppo elevate non giustificabili dai vantaggi che si ritengono possibili.
Un certo vantaggio potrebbe essere ottenuto dall'impiego di nuovi propellenti quali l'idrogeno metallico, avente una densità di 1,15 kg/dm³ e che consentirebbe impulsi specifici da 1000 a 1600 s, ben superiori quindi ai 250÷300 s dei propellenti tradizionali.
Il progetto di propulsione a cicli combinati, che la NASA sta studiando, prevede quattro diversi cicli: il primo, classico, fino a Mach 3; il secondo fino a Mach 6 a statoreattore; il terzo fino a Mach 10 a superstatoreattore. L'ultimo ciclo avviene senza intervento di aria esterna e il motore a razzo è riacceso fino a Mach 25 corrispondente alle condizioni orbitali.
Vanno segnalati altri progetti che assumono aspetti forse avveniristici, ma che vale la pena di menzionare. Tra questi: propulsori a vela solare o concentratori di energia che attivano il riscaldamento e la successiva eiezione di idrogeno liquido; la propulsione laser, specialmente adatta per il lancio di satelliti piccolissimi, che concentra l'energia nel motore per mezzo di uno specchio parabolico, provocando una detonazione pulsata, che propelle il veicolo; la propulsione a microonde che consiste nell'utilizzare un radar di alta potenza per trasmettere l'energia che è poi trasformata a bordo in energia termica.
Motori di apogeo
Satelliti come quelli per telecomunicazioni che si trovano in orbite geostazionarie acquisiscono l'orbita finale attraverso due fasi (v. satellite artificiale, App. IV), la prima delle quali consiste in un'orbita di parcheggio avente perigeo di circa 200 km e apogeo pari alla quota GEO (Geostationary Earth Orbit) di 36.000 km. Quest'orbita viene percorsa parecchie volte (di solito una decina) per l'inseguimento e il posizionamento nell'orbita definitiva: il punto più indicato per l'applicazione dell'impulso che trasforma l'orbita in geostazionaria è l'apogeo, e il motore deve ivi fornire una spinta impulsiva capace di provocare un aumento di velocità di circa 2,3 km/s, che, nelle condizioni descritte, è quella necessaria per far crescere la quota del perigeo fino al valore di quella dell'apogeo. In alcuni casi, per es. quando si usano motori di apogeo a liquido, un solo impulso è insufficiente, e sono allora necessari due o tre impulsi successivi.
Le missioni scientifiche del terzo millennio
L'esplorazione di Marte
Non c'è dubbio che l'esplorazione di Marte sarà uno dei principali obiettivi della ricerca spaziale a breve termine. La NASA ha già programmato nove missioni da effettuare entro il primo decennio del secolo 21°. Il nuovo programma culminerà con il ritorno a Terra entro il 2008 di circa 1 kg di rocce marziane, dal cui esame si attendono importanti risultati.
L'inizio di questo programma si è avuto con la missione del Sojourner, primo atto del programma Pathfinder: il 4 luglio 1997 il minuscolo veicolo atterrava sulla superficie del pianeta rosso. A ventun'anni dall'ultima missione, questa è stata anche la prima volta che un veicolo costruito dall'uomo ha operato su un pianeta diverso dalla Terra, se si escludono i due veicoli sovietici pervenuti su Marte nel 1971, uno dei quali si infranse al suolo, mentre l'altro funzionò per soli 20 secondi. La sonda ha operato secondo la classica formula del sistema lander-rover, già sperimentata con successo agli inizi dell'era spaziale.
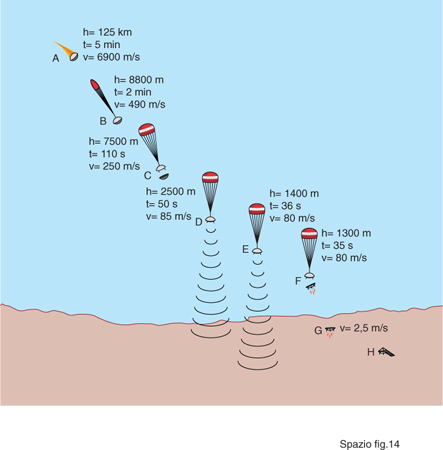
Dal punto di vista tecnologico la piccola sonda ha certamente costituito una brillante risposta alle difficoltà della missione: anzitutto per il rispetto rigoroso della preparazione della missione, durata tre anni; poi per il contenuto onere finanziario, limitato a 265 milioni di dollari, compresi lo sviluppo del lander e del rover, il costo del veicolo di lancio (un razzo Delta, v. spaziali, vettori, App. V), le operazioni della missione e una modesta somma destinata al tracking e al trattamento dei dati. Il viaggio di trasferimento Terra-Marte ha comportato una durata di sette mesi. Complessivamente sono state necessarie quattro correzioni in rotta, che hanno comportato una certa spesa di combustibile per i motori di manovra, risultata peraltro pienamente accettabile. Lo schema delle fasi successive di discesa sulla superficie del pianeta è illustrato in fig. 14.
Un grande successo tecnologico può essere considerato quello relativo all'impiego dell'airbag, che sarà utilizzato anche nelle future missioni su Marte. Infatti, il luogo scelto per l'atterraggio presentava un suolo più accidentato di quanto non ci si aspettasse e l'altro sistema possibile, cioè quello di razzi a retrospinta, non avrebbe avuto possibilità di successo. Invece, per missioni di maggiori dimensioni, come quella prevista per il ritorno da Marte nel 2005, il sistema ad airbag, per motivi di peso, non potrà essere adottato.
L'esplorazione della Luna
Dopo 25 anni di assenza gli Stati Uniti, e più esattamente la NASA, sono tornati a effettuare missioni riguardanti la Luna, e questa volta non per uno sbarco di uomini o di apparecchiature, ma per esplorare la sua superficie. In realtà l'interesse per il nostro satellite naturale non è mai venuto meno, e grande impressione nel mondo scientifico produssero a suo tempo i risultati ottenuti dalla sonda Clementine (spazio, esplorazione dello: La sonda Clementine, App. V), pubblicati alla fine del 1996. Le caratteristiche di un eco radar, secondo alcuni scienziati, potevano far supporre la presenza di ghiaccio in fondo a un cratere situato nei pressi del Polo sud lunare: e si sa che l'acqua, nelle sue varie forme di aggregazione, è assai spesso indice della possibilità di forme di vita, sia pure elementari. Secondo alcuni, la probabilità di trovare l'acqua gelata sarebbe di circa il 90%. Risultati più recenti (Lunar prospector, 1999) hanno in parte ridimensionato tali previsioni.
Comunque, i dati in nostro possesso, oltre alla cartografia realizzata da Clementine, sono limitati ai risultati ottenuti dai campioni di suolo lunare (sei missioni Apollo e tre sonde Luna) e alle osservazioni realizzate per mezzo degli spettrometri gamma in varie missioni sovietiche e statunitensi, tra la fine degli anni Sessanta e gli inizi degli anni Settanta. Ecco perché la recente missione Lunar prospector ha avuto come scopo principale quello di realizzare una cartografia geochimica della Luna, soprattutto a livello delle regioni polari, dove potrebbe trovarsi effettivamente del ghiaccio. Questa impresa, prima della nuova serie di voli lunari, ha avuto una durata complessiva di circa un anno e mezzo; la missione principale è consistita nella inserzione di un satellite in orbita lunare polare, già peraltro effettuata in passato dai sovietici. Lo scopo della missione ha riguardato l'esplorazione della composizione della superficie lunare, del suo campo magnetico e di quello gravitazionale, il rilievo di eventuale attività sismica e l'accertamento della presenza di acqua. La missione, che era iniziata nel gennaio 1998, si è conclusa il 31 luglio 1999 con pieno successo.
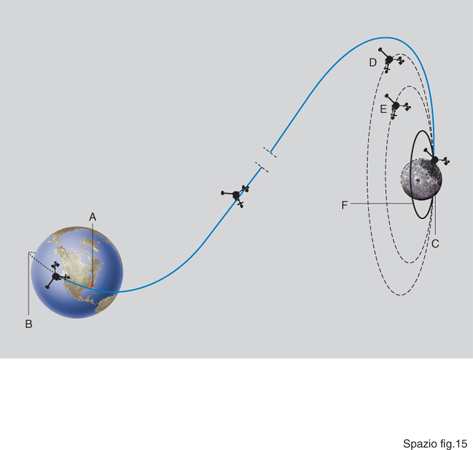
In fig. 15 è rappresentata la traiettoria: dopo il lancio da Cape Kennedy, si è avuta un'orbita di parcheggio alla quota di circa 200 km, seguita dal volo di crociera, della durata di circa cinque giorni, con due correzioni di rotta intermedie; alla fine del viaggio si è avuta l'inserzione in una prima orbita polare di periodo pari a 12 ore, in una seconda orbita con periodo di tre ore e mezzo, fino all'acquisizione dell'orbita finale (e desiderata) di 30 km di quota corrispondenti, con la gravità lunare, a un periodo di 118 minuti. Come si vede, quindi, dal punto di vista della meccanica del volo, si è trattato di una missione abbastanza semplice rispetto alle possibilità offerte dalla tecnologia moderna. La massa della sonda (circa 300 kg), la strumentazione, il tipo di orbita hanno consentito la più lunga e ravvicinata esplorazione della superficie lunare mai ottenuta (progetto Apollo a parte).
Un notevole problema tecnologico è stato rappresentato dal consumo del combustibile per il controllo di assetto. Infatti, mentre per il controllo orbitale non potevano esserci grosse sorprese, per quello di assetto non era possibile prevedere con certezza quanta sarebbe stata l'idrazina necessaria, non conoscendosi in misura sufficientemente accurata il campo gravitazionale lunare. Al riguardo, si era rimasti ai risultati del progetto Apollo, che avevano mostrato forti irregolarità nella distribuzione del campo stesso. Per questo motivo è stato necessario imbarcare una grande quantità di combustibile di controllo, circa il 45% del peso totale della sonda, che avrebbe dovuto essere sufficiente per il prolungamento della missione di almeno sei mesi. In conseguenza di ciò, e sulla base della previsione che al 31 luglio 1999 la sonda avrebbe sorvolato una regione del suolo lunare in cui era stata ipotizzata una concentrazione rilevante di idrogeno, la NASA aveva programmato per quella data un urto controllato del Lunar prospector con la superficie del pianeta. L'urto contro un cratere, costantemente in ombra, situato in prossimità del Polo sud della Luna, avrebbe dovuto liberare una grande quantità di vapore d'acqua osservabile da Terra. L'evento è stato osservato da vari telescopi dotati di sofisticati sistemi di acquisizione di immagine e di spettrografi, con l'obiettivo di individuare la presenza di vapore acqueo o eventualmente del radicale libero OH, che si forma per fotodissociazione del vapore d'acqua. I risultati dell'elaborazione spettroscopica, ancora in corso, non hanno finora portato a evidenze sperimentali certe e lasceranno probabilmente irrisolto il problema di conoscere se l'idrogeno rilevato provenga da vapore d'acqua o sia di altra origine. Sono state fatte varie ipotesi sulla mancata rilevazione di H allo stato libero: il punto d'impatto della sonda, per es., potrebbe essere stato valutato in modo impreciso facendola cadere su rocce prive di minerali idrati.
La missione Cassini
Il nome di questo progetto deriva da quello del grande astronomo italiano G.D. Cassini, vissuto nel 17° secolo, autore, tra l'altro, della prima esatta misurazione del semiasse maggiore dell'orbita di Marte, e del tipo di suddivisione degli anelli di Saturno.
La missione è condotta su base internazionale, ed è frutto di una collaborazione tra la NASA, l'ASI (Agenzia Spaziale Italiana) e l'Alenia Spazio: suo scopo è l'esplorazione di Saturno, e del suo satellite principale, Titano. Questo corpo celeste ha da lungo tempo attratto l'attenzione degli studiosi, a causa della sua atmosfera, già osservata in precedenti missioni, che, essendo ritenuta assai simile a quella della Terra primitiva, dovrebbe consentire di ottenere informazioni preziose per ricostruire l'origine del nostro pianeta.
Nel 1989 si scelse di effettuare questa missione, tra numerose altre proposte presentate, in vista degli accennati scopi scientifici. La distanza del pianeta dal Sole è di circa 10 unità astronomiche, e questo dà un'idea delle grandi difficoltà tecnologiche che è stato necessario superare, alle quali si sono naturalmente sommati grossi problemi di finanziamento. Gran parte delle conoscenze su Saturno erano già state acquisite nel corso delle missioni Voyager 1 e Voyager 2, oltre che dal telescopio Hubble, e questo ha agevolato il progetto dell'ultima fase della missione.
Il lancio, inizialmente previsto per il 6 ottobre 1997, ha avuto luogo con un breve ritardo (15 ottobre): è stato usato il razzo Titan iv, il più potente tra quelli disponibili. La spinta iniziale, nonostante fosse di grande entità, era insufficiente per gli scopi della missione, anche tenuto conto della massa notevole della sonda (circa 6,5 t). Forse l'impiego di un razzo nucleare avrebbe potuto facilitare le cose, ma sono note le resistenze e le critiche delle varie associazioni ambientaliste, che si sono sempre opposte, e continuano a opporsi, alle cariche al plutonio. È stato quindi necessario ricorrere in misura piuttosto massiccia alla tecnica delle spinte planetarie di cui si è parlato in precedenza.

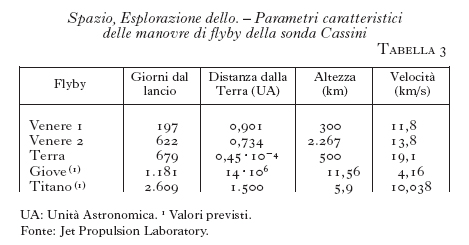
Vale la pena di descrivere la traiettoria della sonda, rappresentata in fig. 16, osservando che le date riportate possono differire da quelle reali, la differenza essendo dovuta all'accennato breve ritardo del lancio, e al recupero di alcuni giorni durante il trasferimento a Venere. La prima fase della traiettoria è un'ellisse eliocentrica che ha fatto sorvolare Venere alla fine di aprile 1998. Segue un'orbita di trasferimento intorno a Venere con manovra effettuata tra la fine di giugno e i primi di luglio 1999. Subito dopo la sonda è stata inviata in direzione della Terra, da cui ha ricevuto un nuovo impulso, per dirigersi su Giove, dal quale la sonda riceverà l'ultimo calcio planetario nel dicembre 2000; l'arrivo a Saturno è previsto nel luglio 2004. Si verificheranno quindi, nel viaggio per Saturno, in totale quattro flyby: Venere 1, Venere 2, Terra e Giove. Altre manovre avranno luogo durante la fase operativa. In tab. 3 sono riportati per ciascuna manovra, i giorni dal lancio, la distanza dalla Terra, l'altezza di sorvolo, la velocità.
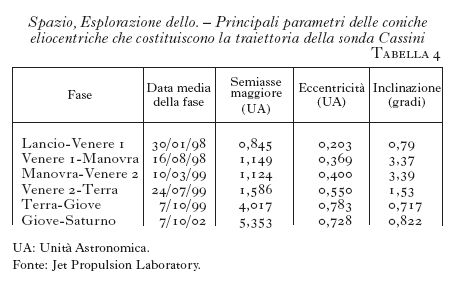
Come già precisato, ciascun segmento della traiettoria di avvicinamento è percorso secondo quanto previsto dalla teoria delle patched conics, o coniche attaccate; nel nostro caso si tratta complessivamente di sei ellissi, di cui ha interesse indicare i parametri caratteristici. In tab. 4 sono riportati soltanto i valori dei parametri più interessanti (semiasse maggiore, eccentricità, inclinazione rispetto al piano dell'eclittica). La sonda è destinata, quindi, a percorrere traiettorie sempre più ampie e sempre più ellittiche, con inclinazione assai piccola rispetto al piano dell'eclittica, e con un grande risparmio energetico rispetto al caso di orbite inclinate.

La sonda è concepita secondo lo schema orbiter-lander, già impiegato con successo dall'epoca delle prime esplorazioni spaziali. L'orbiter Cassini dovrebbe effettuare oltre 60 orbite intorno a Saturno a quota (e quindi a periodo) variabile, procedendo anche a rilevazioni degli altri satelliti di Urano; Titano sarà sorvolato circa trenta volte, secondo le previsioni attuali, utilizzandone il calcio planetario, e riuscendo così a risparmiare molto del propellente che sarebbe stato necessario per tutte le necessità di bordo. La separazione del lander, denominato Huygens, è prevista nel corso della prima orbita su Saturno e la traiettoria di discesa su Titano è quella classica di rientro in una atmosfera planetaria, descritta in fig. 17. La velocità di atterraggio raggiunge i 18÷20 m/s: ciò potrebbe comportare seri problemi per l'integrità strutturale della sonda e della sua strumentazione. Le batterie al litio e biossido di zolfo dovrebbero consentire una trasmissione di dati della durata di circa trenta minuti; trasmissione da effettuare all'orbiter che a sua volta li trasmetterà a terra.
bibliografia
R.G. Jahn, Physics of electric propulsion, New York 1968.
Computer Sciences Corporation, Attitude Systems Operation, Spacecraft attitude determination and control, ed. J.R. Wertz, Dordrecht-Boston 1978.
J.W. Cornelisse, Rocket propulsion and spaceflight dynamics, London 1979.
Fluid sciences and materials science in space. A European perspective, ed. H.U. Walter, Berlin-New York 1987.
Handbuch der Raumfahrttechnik: Grundlagen, Nutzung, Raumfahrtsysteme, Produktsicherung und Projektmanagement, ed. W. Hallmann, München 1988.
Spacecraft systems engineering, ed. P.W. Fortescue, J.P.W. Stark, Chichester 1991.
Space mission analysis and design, ed. J.R. Wertz, W.J. Larson, Dordrecht-Boston 1991.
Satellite thermal control handbook, ed. D.G. Gilmore, M. Bello, El Segundo (Calif.) 1994.
E. Soop, Handbook of geostationary orbits, Dordrecht 1994; E. Messerschmid, Space stations: systems and utilization, Berlin-New York 1999.