
Spazio, esplorazione dello
SPAZIO, ESPLORAZIONE DELLO
di Paolo Santini e Rolando Quadri, Benedetto Conforti
La conquista dello spazio di Paolo Santini
sommario: 1. Introduzione. 2. Storia delle conquiste spaziali. a) I precursori. b) I razzi. c) I satelliti artificiali. 3. I veicoli di lancio. a) Principi fondamentali. Configurazioni classiche. b) Produzione della spinta. c) Dinamica del missile. 4. La tecnica orbitale. a) Principali fenomeni orbitali. b) Previsioni orbitali. c)Manovre orbitali; cambiamento di orbita. d) Restituzione orbitale. e) I sistemi dei satelliti artificiali. f) Strutture e materiali. g) Applicazioni dei satelliti artificiali. 5. L'esplorazione dello spazio. a) Dinamica dei voli interplanetari. b) I sistemi dei veicoli spaziali. c) L'esplorazione del sistema solare. 6. Il volo umano nello spazio. a) lI pre-Apollo. b) Il progetto Apollo. c) Il post-Apollo. d) Lo Shuttle. e) iI futuro. □ Bibliografia.
1. Introduzione
L'attività spaziale ha meno di venticinque anni di vita, eppure i progressi fatti in questo campo non hanno riscontro, probabilmente, in nessun altro settore tecnico-scientifico. Il tasso di innovazione della tecnologia dello spazio è decisamente più elevato di quello di ogni altra tecnologia moderna di avanguardia, al punto che le cose dette o scritte oggi al riguardo potranno sembrare sorpassate tra pochi anni, o addirittura tra pochi mesi.
L'attività spaziale, i piani ad essa connessi, le realizzazioni concrete hanno colpito e colpiscono ancora così profondamente l'opinione pubblica di un mondo, come quello moderno, dedito alla ricerca insaziabile di nuove conquiste e di nuove frontiere, che ne è derivata una serie di iniziative editoriali e culturali; così si è sviluppata una letteratura fantascientifica, un giornalismo spaziale (o aerospaziale), una serie di convegni, di relazioni, di proposte, che aumentano anch'essi a un ritmo vertiginoso.
L'attività spaziale comprende la missilistica e l'esplorazione spaziale, due campi abbastanza nettamente separati sul piano culturale, metodologico e tecnologico, tenuti insieme dalla circostanza che la possibilità del secondo è nettamente subordinata alla disponibilità del primo. La stessa esplorazione spaziale, poi, assume caratteristiche e contorni nettamente diversi, a seconda che si tratti di ‛esplorare' mediante satelliti artificiali, o mediante sonde spaziali. Sono diversi, nei due casi, l'ambiente di lavoro, le tecnologie, gli apparati scientifici. Queste circostanze fanno sì che le trattazioni dei singoli campi vadano tenute separate, anche se, invece, lo sviluppo storico delle conquiste spaziali si svolge con una sostanziale continuità di eventi.
2. Storia delle conquiste spaziali
a) I precursori
Si può far risalire l'origine della storia delle imprese spaziali all'inizio del XX secolo. Fra coloro che posero le basi scientifiche del volo spaziale i più famosi sono il russo Ciolkovskij, l'americano Goddard e il tedesco romeno Oberth (v. Buedeler, 1979).
K. E. Ciolkovskij, giunto con notevole ritardo all'insegnamento medio, si occupò di molti problemi connessi con l'aeronautica in generale e, in particolare, fin dal 1893, del tema del movimento per reazione dei veicoli aerospaziali. Nel 1903, nel celebre lavoro Ricerche sugli spazi cosmici per mezzo di apparati a reazione, egli formulò la teoria dinamica del razzo a massa variabile e dimostrò anche la possibilità di raggiungere gli spazi interplanetari per mezzo di tali apparati; in questo lavoro, e in altri successivi, vengono calcolati scientificamente i consumi, le accelerazioni, le traiettorie dei veicoli di lancio e di quelli orbitali, le temperature, le condizioni ambientali. Una notevole parte del lavoro è dedicata allo studio degli effetti della microgravità, o assenza di peso, sull'organismo umano: è questa, si può dire, la prima opera di medicina aerospaziale, tema su cui Ciolkowskij aveva meditato e fatto esperienze in gioventù. Tra le altre opere di Ciolkowskij va ricordata Al di fuori della Terra, in cui è descritto nei particolari un possibile viaggio spaziale fino alla Luna e a Marte, e in cui viene, per la prima volta, lanciata l'idea delle colonie spaziali. Per i mezzi di propulsione, Ciolkowskij accenna alle possibilità di uso del cluster di razzi (molti razzi disposti in parallelo), configurazione poi effettivamente realizzata nei più grossi vettori moderni.
L'americano R. H. Goddard può, bene a diritto, essere considerato il padre della missilistica. Passato dai sogni dell'infanzia alla cattedra universitaria, prima alla Clark University, poi a Princeton, Goddard formulò per primo le leggi che regolano la termodinamica della propulsione a razzo, la relazione tra temperatura di combustione e spinta, la distribuzione delle pressioni in camera di combustione, e discusse scientificamente la possibilità di raggiungere corpi celesti. Nel 1926, dopo vari tentativi, Goddard riuscì finalmente a sperimentare con successo tre razzi, ciascuno del peso di 2,7 kg, con 2 kg di propellente. I razzi volavano a velocità dell'ordine di 100 km/h su una distanza di 50 metri, raggiungendo una altezza massima di 12,5 m. Seguirono successivi perfezionamenti (compreso anche un primo esemplare di sistema di controllo), che portarono a traiettorie sempre più ambiziose e sofisticate. Goddard va ricordato anche come realizzatore del bazooka, celebre razzo tattico in dotazione all'esercito degli Stati Uniti.
Ma è forse H. Oberth quello cui spetta il titolo di padre dell'astronautica. Nato nel 1894 - e tuttora vivente - egli pubblicò nel 1923 il suo lavoro più celebre: Die Rakete zu den Planetenräumen. Nella prima parte del lavoro vengono descritti, con assoluto rigore scientifico, i principi del volo spaziale e le grandezze relative: fondamentale, tra l'altro, la chiara esposizione del principio della suddivisione in stadi, rintracciabile peraltro anche nelle opere di Ciolkowskij, al punto che non è possibile risolvere le questioni di priorità. Stupefacenti sono la previsione dei tipi di combustibile e la discussione dei fenomeni di microgravità connessi con il volo spaziale. La seconda parte ha carattere più spiccatamente pratico e ha lo scopo di mostrare le effettive possibilità di realizzazione del principio esposto da Oberth. Nella terza parte vengono infine discusse le possibili applicazioni del volo spaziale, ed è sorprendente la previsione di Oberth dei satelliti per telecomunicazioni (almeno per il principio di funzionamento) e delle grandi stazioni spaziali. Oberth va anche ricordato come consulente tecnico del primissimo film di fantascienza realizzato dall'UFA nel 1929: Una donna sulla Luna.
b) I razzi
La storia dei razzi comincia nell'XI secolo, in Cina, nazione che ha, anche recentemente, rivendicato questa paternità. Un antico documento ricorda infatti un tipo di razzo lanciato a mano per scopi essenzialmente militari. Veri e propri razzi sembrano, invece, quelli contenuti nella descrizione del combattimento sotto le mura della città di Kaifung-hu, che si difendeva dall'assalto dei Mongoli per mezzo di ‛lance di fuoco volanti': la descrizione dell'arma non lascia dubbi in proposito. Resta piuttosto aperta la questione, invece, se il razzo sia stato proprio inventato in Cina, o, come qualche storico sostiene, sia invece stato importato dall'Europa e poi ivi riesportato. Sta di fatto che in Europa il razzo era usato, per scopi bellici, nei secoli XIII-XV; poi, per un paio di secoli, esso cadde in disuso, per riapparire, sempre in ambito militare, nei secoli XVIII-XIX. Ma solo dopo la prima guerra mondiale il razzo cominciò a essere intensamente studiato. F. von Opel, nel 1928, pensò di applicare la propulsione a razzo alle automobili; ebbe come collaboratore (poi rivale) M. Valier, che aveva invece progettato un aeroplano con propulsione a razzo (v. Buedeler, 1979). I tentativi di von Opel furono coronati da successo tecnico, ma l'idea venne presto abbandonata, a causa del proibitivo consumo del razzo, alle velocità tipiche del traffico terrestre, consumo legato a sua volta al bassissimo rendimento propulsivo a quelle velocità.
Ma il più grande impulso alla missilistica tedesca doveva provenire dall'ambiente militare. I razzi non figuravano tra le armi vietate dal trattato di pace e questo indusse lo Stato Maggiore a costituire un primo nucleo di tecnici incaricati del loro sviluppo, che ebbe la sede a Kummersdorf, vicino a Berlino, nel 1929. Tra i componenti va ricordato il capitano ingegnere W. Domberger, che, nel 1931, assunse il non ancora ventenne e non ancora laureato W. von Braun. Questi ebbe l'incarico di studiare i razzi ‛a flusso continuo', ossia a liquido, contrapposti a quelli ‛a polvere', ossia a solido. Gli esperimenti iniziarono a Kummersdorf col piccolo razzo Ofen, da 20 t di spinta, da portare a 350. Iniziò così la serie di razzi designata dalla sigla A (Aggregat): l'A1 e l'A2, piuttosto piccoli, i cui lanci furono coronati da successo, raggiunsero quote dell'ordine dei 200 m. Il successivo razzo, l'A3, fu il precursore della V2 e segnò il trapasso all'effettivo impiego dei razzi di grosse dimensioni.
Intanto Kummersdorf era divenuta inadeguata: era necessaria una sede di maggiore estensione, lontana per quanto possibile dai centri abitati, con vie di accesso sufficienti. Si dice che la località sia stata suggerita a von Braun dalla madre: l'isoletta di Peenemünde, sul Baltico, dove il padre dello stesso von Braun si era spesso recato a caccia di folaghe.
Da quel momento nasce il mito di Peenemünde, con von Braun e Domberger strettamente legati e protagonisti dell'impresa. Nel frattempo erano state effettuate le prime quattro prove dell'A3, che costituirono altrettanti insuccessi; allora a Peenemünde si decise di puntare su una versione dello stesso razzo più adatta a scopi pratici (l'A3 era essenzialmente sperimentale). Impossibile seguire passo passo lo sviluppo del razzo, da cui doveva derivare la V2 e che effettuò il primo volo il 3 ottobre 1942, volo coronato da successo e con le seguenti caratteristiche: velocità massima 1.500 m/s, distanza di lancio 200 km, altezza 90 km. Contemporaneamente, a Peenemünde, veniva sviluppato un sistema di bomba volante, l'F 103, che sarebbe poi divenuta la V1 (Vergeltungswaffe 1 = arma di rappresaglia 1). Il debutto militare della V1 (che applicava il principio della pulsoreazione, in cui la combustione avviene a spese dell'aria atmosferica, e che non poteva, quindi, raggiungere quote troppo elevate) avvenne il 13 giugno 1 944. Le V1 ebbero un forte impatto psicologico sull'opinione pubblica in Inghilterra, la nazione su cui le bombe erano dirette. I bombardamenti con le V1 durarono fino al settembre 1944; dopo pochi giorni di interruzione, l'offensiva tedesca riprese, stavolta con le V2, o A4, di cui furono lanciate su Londra circa 11 .000 esemplari: l'ultima il 27 marzo 1945.
Nel frattempo a Peenemünde, sull'ondata dell'entusiasmo provocato dal successo delle V2, si sviluppavano progetti sempre più ambiziosi, come quello dell'A10, il razzo che sarebbe stato ribattezzato Amerika e che non volò mai, come non volarono mai tutti gli altri A.
Comunque, poche settimane prima della resa della Germania, la maggior parte degli impianti di Peenemünde fu trasportata in tutta fretta a Nordhausen. I sovietici, entrati a Peenemünde nel maggio 1945, non trovarono che poche attrezzature e circa un quarto dei tecnici, che costituirono, peraltro, il ‛nucleo tedesco' della missilistica sovietica.
Ben più numeroso fu il gruppo di von Braun, che, invece, si recò negli Stati Uniti, e ivi continuò l'opera iniziata.
Negli Stati Uniti la missilistica aveva avuto, come si è già visto, un grande pioniere in Goddard, ma uno sviluppo pratico assai modesto, nemmeno lontanamente paragonabile a quello tedesco. Il primo esemplare di razzo praticamente utilizzabile fu il Corporal, nel 1947, seguito ben presto da un altro esemplare, l'Aerobee, destinato a scopi essenzialmente scientifici e usato come razzo sonda per ottenere dati sempre più attendibili sulle grandezze fisiche dell'alta atmosfera. L'Aerobee fu un notevole successo ed ebbe anche applicazioni militari. A questo punto, l'entrata in scena di von Braun e degli altri tecnici tedeschi dette grande impulso alla missilistica americana. Al centro di Huntsville, in Alabama, fu realizzato per l'esercito il missile Redstone, caratterizzato da una estrema affidabilità, al punto da meritare, alcuni anni più tardi, il nomignolo di Old Reliable, ‛vecchio di fiducia'. Sebbene concepito per scopi militari, il Redstone, sotto l'incalzare dei successi sovietici, fu usato per il lancio dei due voli suborbitali che inaugurarono il programma statunitense di volo spaziale umano. Le caratteristiche del Redstone erano: peso al decollo 30 t, spinta al decollo 35 t, velocità a fine combustione 7.000 km/h; queste caratteristiche furono ottenute attraverso una serie di modifiche apportate alle prime versioni. Inimmaginabili, per il non esperto, le difficoltà che si dovettero superare per aumentare la lunghezza dei serbatoi di propellente di 1,80 m, allo scopo di allungare di 20 s il tempo di combustione. Nel frattempo si era sviluppata negli Stati Uniti una forte polemica tra le varie forze armate, la NACA (National Advisory Committee for Aeronautics), successivamente trasformata in NASA (National Aeronautics and Space Administration) e altri enti governativi, per la priorità delle scelte nel programma spaziale.
Il lancio dello Sputnik (v. tav. I), il 4 ottobre 1957, colse di sorpresa l'opinione pubblica mondiale, in particolare quella statunitense, e mise in luce il grave ritardo dell'attività spaziale americana rispetto a quella sovietica, mostrando soprattutto l'inadeguatezza del programma basato sul progetto Vanguard. Il razzo Vanguard (v. tav. I), derivato dai razzi sonda della marina americana, era stato prescelto nel 1955 come lanciatore del primo satellite statunitense; si trattò di una scelta assai infelice, come gli eventi poi dimostrarono. La questione principale era se convenisse adottare, per lanci orbitali, razzi derivati dai razzi sonda per ricerche di aeronomia (come appunto il Vanguard), oppure missili militari opportunamente modificati.
Il primo razzo Vanguard, il TV2, fu lanciato con successo in volo suborbitale nel 1957; il secondo esemplare, il TV3, esplose sulla rampa di lancio; due mesi più tardi il veicolo di riserva andò fuori traiettoria e fu distrutto alla quota di 5,8 km. Si andò avanti così per vari anni finché, nel 1962, il programma fu definitivamente cancellato. Il 2° e il 3° stadio, che avevano raggiunto un notevole grado di affidabilità, furono trasferiti al Thor e all'Atlas e il 3° stadio anche allo Scout.
Comunque, dopo lo Sputnik, Washington decise di rivolgersi a von Braun, che aveva da tempo proposto, inutilmente, di mettere in orbita piccoli carichi paganti (dell'ordine delle decine di kg). A quell'epoca il gruppo di Huntsville aveva sviluppato il razzo Juno I, un derivato a 4 stadi del tristadio Jupiter C, a sua volta derivato dal Redstone, che permise la realizzazione delle prime fasi del programma Explorer.
Dopo questi inizi così incerti, la missilistica statunitense ha proceduto con passo sempre più spedito verso realizzazioni sempre più prestigiose. Il largo spettro dei veicoli approntati negli Stati Uniti ha consentito alla NASA e al Dipartimento della Difesa di mettere in orbita carichi utili che vanno dai 9 kg alle 136 t del Saturno. Tra i più prestigiosi razzi americani vi è l'Atlas, capace di una spinta al decollo di 170 t. Fu impiegato un Atlas nella missione di John Glenn (20 febbraio 1962), il primo astronauta americano (v. Turnill, Spaceflight..., 1978). Vi furono dieci voli Atlas D nel progetto Mercury, il programma pionieristico statunitense di volo umano. L'Atlas è stato usato più di 400 volte in 25 programmi spaziali. L'Atlas 2E (un solo stadio) ha un'altezza complessiva di 20 metri dalla base alla sezione di attacco del carico utile ed è stato ottimizzato dal punto di vista strutturale, con un alleggerimento così pronunciato che il suo trasporto dai magazzini alla base di lancio comporta alcuni problemi legati alla sua integrità. L'Atlas è combinato con altri razzi, allo scopo di formare dei polistadi: in particolare l'Atlas-Agena e l'Atlas-Centaur, razzo bistadio ad alto potenziale, capace di porre fino a 1.800 kg in orbita geostazionaria. Così l'Agena D, lanciato come secondo stadio di un Atlas, fu usato come bersaglio di aggancio (docking) in alcuni voli del programma Gemini.
Uno dei ‛veterani' tra i missili statunitensi è il Thor, concepito inizialmente come IRBM (Intermediate Range Ballistic Missile, ‛missile balistico a medio raggio'); le sue più recenti versioni forniscono ora i veicoli di lancio più frequentemente usati, con spinte alla partenza dell'ordine delle 150 t.
Il Titan, sviluppato fin dagli anni sessanta, è attualmente il più potente veicolo di lancio americano. Il Titan 3E riesce a mettere in orbita sincrona fino a 3.500 kg. Il primo volo di prova avvenne nel 1974; col secondo volo, sempre nel 1974, il Titan mise in orbita con successo l'Helios, sonda solare della RFT; coi due voli successivi le sonde Viking verso Marte. La produzione e lo sviluppo di nuovi missili per usi spaziali (escluse quindi le applicazioni militari) ha subito un certo rallentamento con l'avvento dei boosters recuperabili (Shuttle).
Relativamente alla storia parallela della missilistica negli altri paesi, a guerra finita, mentre i tecnici di Peenemünde venivano dispersi, parte negli Stati Uniti, parte in Unione Sovietica, alcune nazioni europee svilupparono dei missili per scopi eminentemente militari. Tra queste, la Gran Bretagna, con il suo Blue Streak, che si rivelò ben presto un fallimento, soprattutto a causa delle enormi spese che esso richiedeva per una messa a punto completa. Si giunse così all'ottobre 1961, quando in una conferenza Europea a Londra fu proposta la fondazione dell'organizzazione ELDO (European Launcher Development Organization), che si sarebbe affiancata alla consorella ESRO (European Space Research Organization), destinata a realizzare il lanciatore europeo, basato appunto sul Blue Streak come primo stadio. La costituzione ufficiale dell'ELDO si ebbe nel 1964; i paesi membri erano Belgio, Francia, Germania, Gran Bretagna, Italia, Olanda, Australia. La presenza di quest'ultima era giustificata dalla prevista utilizzazione del poligono di lancio di Woomera, nella parte settentrionale dello Stato di Adelaide. L'accordo prevedeva, sul piano finanziario, una partecipazione delle varie nazioni a percentuale non uniforme e in cambio di questa partecipazione un certo numero di commesse di lavoro a industrie dei singoli Stati con percentuali più o meno equivalenti a quelle di spesa. In realtà furono effettuate notevoli discriminazioni; egoismi e rivalità non solo nazionali aggravarono il quadro politico, organizzativo ed esecutivo. Fu dapprima progettato il razzo Europa 1 (2° stadio Coralis, Francia; 3° stadio Astris, Germania; satellite di prova, Italia). Il primo lancio, effettuato nel 1970, fu un completo insuccesso, per la mancata espulsione dei fairings e la perdita di spinta nel 3° stadio. In seguito a tale insuccesso, la Gran Bretagna (che pure aveva promosso l'impresa) si ritirò; le altre nazioni, su impulso soprattutto della Francia, decisero di continuare il programma e anzi di potenziarlo; infatti il progetto Europa 2 prevedeva anche un 4° stadio (essenzialmente un motore di apogeo), con una capacità complessiva di 200 kg utili in orbita geostazionaria. L'obiettivo era di lanciare due satelliti Symphonie franco-tedeschi nel biennio 1973-1974. Tuttavia, anche il secondo lancio (dal poligono equatoriale francese della Guyana) finì in un disastro. Il razzo Europa 3 era già in viaggio verso il poligono (a bordo di una nave) quando, nel 1973, il progetto fu abbandonato e fu costituita l'ESA (Furopean Space Agency). Uno dei primi progetti approvati dall'ESA fu lo sviluppo di un veicolo di lancio europeo capace di 800 kg geostazionari, da rendere operativo per gli anni ottanta. Fu in particolare la Francia a insistere per l'accettazione del programma Ariane (dal nome del lanciatore europeo), sostenendo la necessità che l'Europa possedesse propri vettori per lanciare satelliti applicativi, senza dover dipendere dagli Stati Uniti.
L'Ariane (v. tav. II) è un veicolo a tre stadi, con un peso di 200 t, lunghezza 48 m e diametro di 3,8 m. Il primo stadio, derivante direttamente dal primo stadio dell'Europa 3, con propellente liquido convenzionale (perossido di azoto + dimetilidrazina asimmetrica), ha quattro razzi Viking, per una spinta totale di 240 t, della durata di 140 s; il secondo stadio sviluppa 70 t di spinta per 131 5, mentre il terzo stadio (H2 + O2 liquidi) sviluppa 7 t di spinta per 10 s.
Il primo volo di prova dell'Ariane, nel dicembre 1979, fu coronato da successo, mentre il secondo (maggio 1980) fallì, a causa di problemi derivanti da instabilità di combustione del secondo stadio, che causarono vibrazioni ad altissima frequenza e conseguenti elevati sovraccarichi dinamici. Il terzo volo (20 giugno 1981) fu un completo successo: l'Ariane riuscì a porre in orbita tre satelliti di prova (due europei e uno indiano). Sembrava a questo punto che l'Ariane potesse considerarsi del tutto operativo; ma un ulteriore lancio, effettuato nel settembre 1982, si risolse in un insuccesso, legato alla cattiva accensione del terzo stadio. Andarono distrutti, tra l'altro, due satelliti di prova, uno dei quali, il Sino II, italiano. Tutto quindi veniva rimesso in discussione.
Si hanno scarsissime informazioni sulle realizzazioni sovietiche in campo missilistico; realizzazioni che debbono peraltro essere imponenti, a giudicare dai risultati raggiunti. Gli esperti occidentali hanno identificato alcuni veicoli base, di cui particolarmente interessante appare quello destinato al lancio delle Soyuz. Non è possibile fornire dati precisi al riguardo: si ritiene che il lanciatore Soyuz possa porre in orbita bassa fino a 7.500 kg e 1.100 kg in orbita geostazionaria. Il più grande missile sovietico è probabilmente quello destinato al lancio dello Zonda; questo missile ha la stessa configurazione del lanciatore Soyuz, ma è assai più potente (22.000 e 1.600 kg).
c) I satelliti artificiali.
Il 30 settembre 1957 scienziati di sette nazioni erano riuniti a Washington, per preparare i lavori dell'anno geofisico internazionale. A un certo punto, il delegato sovietico, S. Poloskow, parlando, pronunciò la parola sputnik (‛compagno di viaggio'), ma quasi nessuno ci fece caso. Dopo quattro giorni, il 4 ottobre, durante un ricevimento all'ambasciata sovietica, il giornalista del New York Times, W. Sullivan, fu chiamato al telefono dalla sua redazione, che gli comunicò la messa in orbita della prima sonda sovietica: lo Sputnik.
La notizia destò grande sensazione, ed ebbe ripercussioni all'8° Congresso Internazionale di Astronautica, che si riuniva a Barcellona due giorni dopo il lancio, non tanto perché ci si aspettassero risultati scientifici eccezionali, quanto perché i sovietici dimostravano così di essere avanti a tutti gli altri, Stati Uniti compresi, nella corsa allo spazio, con le inevitabili implicazioni di carattere politico e militare (v. Buedeler, 1979). Lo Sputnik era stato lanciato probabilmente con un vettore standard da circa 500 t di spinta al decollo; la sua orbita era ellittica, con perigeo di 228 km e apogeo di 947; l'inclinazione, di 65°, andava messa in relazione alla latitudine del poligono di lancio. Strutturalmente si trattava di una sfera metallica del diametro di 0,58 m provvista di quattro antenne lunghe da 1,5 a 2,9 m.
Lo Sputnik (poi denominato Sputnik 1) aveva una strumentazione capace di misurare le proprietà fisiche dell'alta atmosfera, in particolare densità, temperatura e densità di particelle, e, ovviamente, un apparato telemetrico che gli consentì di trasmettere a terra i dati per 21 giorni; la sua vita orbitale invece durò più di tre mesi.
Il lancio dello Sputnik colse di sorpresa gli americani, che tentarono di riguadagnare il terreno perduto. Ma intanto i sovietici riuscivano a compiere un'altra impresa sensazionale con il lancio dello Sputnik 2, che portava a bordo la cagnetta Laika, la prima vittima dell'attività spaziale. Lo scopo dell'esperimento era soprattutto lo studio degli effetti dell'assenza di peso sugli organismi viventi; la trasmissione dei dati durò 7 giorni, fino alla morte di Laika. La serie Sputnik dei satelliti sovietici continuò fino al n. 10, lanciato nel 1961.
Il motivo del ritardo statunitense fu individuato nell'aver puntato sul programma Vanguard, di cui si è già parlato, rifiutando le proposte del gruppo von Braun. Ma dopo lo Sputnik 2 fu dato all'ABMA (l'ente dell'esercito da cui von Braun dipendeva) il go ahead (‛procedete'), con un programma che prevedeva il lancio di due satelliti per il 30 gennaio 1958. La lotta e le rivalità tra i due gruppi, quello dell'ABMA e quello del Vanguard, continuarono anche sulla rampa di lancio. Il 29 e il 30 gennaio le condizioni del tempo sconsigliarono il lancio dell'Explorer I (il veicolo di von Braun) e al team di lancio fu concesso un solo giorno di proroga, dopo di che la rampa avrebbe dovuto essere liberata per far posto al satellite Vanguard.
Finalmente, in condizioni meterologiche migliori, fu possibile il lancio alle 22 e 48 del 31 gennaio 1958. Un'ondata di entusiasmo attraversò gli Stati Uniti alla notizia che il lancio era perfettamente riuscito e che il primo satellite americano, il terzo nel mondo, era finalmente in orbita. A differenza dello Sputnik 1, e nonostante il peso estremamente ridotto (di soli 14 kg), l'Explorer I raccolse dati di grande interesse scientifico, riguardanti i raggi cosmici, le meteoriti e la temperatura degli strati superiori dell'atmosfera. In particolare, molto interessanti si rivelarono i dati sulle micrometeoriti, che erano state sempre considerate un grosso pericolo per l'integrità strutturale dei veicoli spaziali e sulle quali erano state avanzate le più svariate congetture. Ma la più importante scoperta dell'Explorer 1, che percorreva un'orbita di 360 × 2.532 km, con un'indinazione di 65°, fu la conferma sperimentale dell'esistenza delle cosiddette ‛fasce di Van Allen', formate da particelle cariche emesse dal Sole e intrappolate dal campo magnetico terrestre, così da formare delle vere e proprie cinture attorno alla Terra. Queste fasce erano state predette teoricamente appunto da Van Allen, ma solo con l'avvento della tecnica spaziale si ebbe la certezza della loro presenza a una quota valutata di circa 10.000 km al di sopra della superficie terrestre. L'Explorer 1 ebbe vita attiva assai breve (circa 4 mesi) e vita orbitale, invece, assai lunga (circa 12 anni).
La storia degli altri tipi di satelliti artificiali è strettamente connessa con la loro tecnologia, perciò viene rinviata al cap. 5, che tratta dell'evoluzione, anche tecnica, dei programmi di esplorazione spaziale.
3. I veicoli di lancio
a) Principi fondamentali. Configurazioni classiche
Come si è detto, e come è ovvio, qualunque forma di attività spaziale è possibile solo a patto di possedere degli efficienti veicoli di lancio. È questo un fattore di vitale importanza sia dal punto di vista tecnico che da quello politico-economico, in quanto solo chi è indipendente sul piano del vettore di lancio può poi utilizzare i proventi - sotto qualunque forma - dello spazio, in misura altrettanto indipendente.
I veicoli di lancio, o missili, hanno lo scopo di imprimere a un ‛carico pagante', che si trova inizialmente a riposo sulla superficie terrestre in un punto A, una spinta tale da fargli raggiungere una velocità v (da valutare in intensità e in direzione) in un punto assegnato H (v. fig. 1). Si tratta quindi di un problema di meccanica, che peraltro differisce notevolmente da quelli classici, in quanto sono assegnati i valori iniziali e finali della velocità e della posizione e si tratta di effettuare una scelta, ossia di dosare le forze che debbono portare il carico utile dallo stato A allo stato B. Per questo motivo, un missile deve possedere organi di ‛propulsione' e organi di ‛guida e controllo'.
Come è noto, i moderni sistemi di propulsione utilizzano il principio di reazione. In base ad esso (v. fig. 2), se la massa del corpo è m(t) e se la velocità del gas di scarico relativa al corpo (nella fattispecie il missile) è vr l'equazione del moto si scrive

dove, detta a la massa del gas espulso,
S = μ• vr (2)
è la spinta prodotta dall'effiusso del gas e
D= D(v, t) (3)
è la risultante delle forze esterne (peso escluso) che agiscono sul missile, per esempio la resistenza aerodinamica.
Consideriamo, come caso particolare, la salita di un missile lungo la verticale e trascuriamo per il momento le forze mg e D. Indicando con v e vr i valori scalari di v e di vr, che hanno direzione opposta, e tenendo presente che è μ• = − í, la (1) si scrive
mv• − ívr, (4)
Separando le variabili e integrando dall'istante t = 0 (inizio del volo) all'istante generico t, si ha

Particolare interesse riveste la ‛velocità di fine combustione', vf, ossia quella acquisita quando tutto il propellente disponibile è consumato. Si ha, dalla (5),
vf = vr ln ρ, (6)
dove
ρ = m0/mf (7)
è il ‛rapporto di massa'. Velocità di efflusso dei prodotti della combustione e rapporto di massa sono, quindi, i due parametri fondamentali che regolano la velocità finale (6) acquisita dal missile.
Se si suppone ora di trascurare D, ma non mg, si ottiene, al posto della (5), la seguente:

L'integrale che figura nella (8) prende il nome di ‛perdita gravitazionale'. Per la sua valutazione corretta, occorre riflettere che, poiché l'accelerazione di gravità è variabile con le coordinate geografiche, in particolare con la quota, sarebbe necessario conoscere già la legge del moto. Scriviamo comunque
dt = dm/í = − dm/μ•. (9)
La portata dei gas effluenti, ossia μ•, è un indice della potenzialità del missile. Possiamo dare una maggiore evidenza al ragionamento introducendo il parametro adimensionale
ν = (μ• vr)/gm0, (10)
che definisce (in multipli di g) l'accelerazione che il motore è capace di imprimere a una massa pari a quella del razzo alla partenza. Trascurando le variazioni del rapporto μ•/g, anche in vista del valore generalmente piccolo delle perdite gravitazionali, si ha dunque finalmente dalla (8), per t = tf,

Dalle formule precedenti appare evidente il ruolo fondamentale del rapporto di massa al fine di raggiungere elevate velocità di fine combustione. In particolare si nota che, per ρ → ∞, si avrebbe un aumento di velocità infinito. Questo risultato, sebbene basato su una situazione del tutto irrealizzabile (massa finale nulla), indica la via da seguire per ottenere, ceteris paribus, prestazioni quanto più elevate possibili.
A tal fine, affrontiamo il problema più generale pensando, in modo assai schematico, che il missile sia costituito da tre parti: il carico utile, di massa U, il propellente, di massa P, la struttura, di massa S. Si ha allora la massa iniziale m0 = U + P + S e la massa finale U + S; quindi il rapporto ρ vale
ρ = 1 + P/(U + S). (12)
È quindi evidente che si ha tutto l'interesse a ridurre al minimo il peso della struttura in confronto al peso del propellente, per un carico utile assegnato. Ora è intuitivo che ogni chilogrammo di propellente esige un certo numero di chilogrammi di struttura per essere sostenuto e poter così esplicare la sua funzione. Alla luce di queste considerazioni, si capisce come un missile monostadio rappresenti una soluzione poco soddisfacente, in quanto il peso strutturale è lo stesso al principio della combustione (quando cioè è tutto necessario) e alla fine (quando cioè è quasi tutto superfluo: ‛quasi' tutto, perché va ancora sostenuto il carico utile).
Per esaminare meglio la questione, consideriamo un caso ancora del tutto teorico e irrealizzabile, ma estremamente illuminante. Supponiamo che, per il corretto funzionamento del missile, siano necessari β kg di struttura eliminabile per ogni chilogrammo di propellente (β potrà essere calcolato o stimato su base empirica) e supponiamo che a ogni istante venga abbandonata la frazione di struttura che non è più necessaria; si realizza così il missile ad ‛alleggerimento continuo'. In un tale caso, pensando di poter ancora trascurare mg e D nella (1) e ponendo correttamente í = − (1 + β) μ• , si avrà, in luogo della (4), la
mv• = − ívr/(1 + β). (13)
Integrando si ha, analogamente, al posto della (6),

Nella (14) S è la massa strutturale all'inizio della fase propulsa, alla fine della quale essa è ridotta al valore S − βP.
Posto ancora
τ = (S + U)/P, (15)
con τ > β, la (14) fornisce

La (16) è rappresentata nel diagramma della fig. 3, dal quale appare evidente il vantaggio che si ha con l'aumento di β.
Come si è detto, il caso ora trattato è estremamente teorico. Si cerca di avvicinarsi, per quanto possibile, a questo schema, procedendo anziché a un alleggerimento continuo - a una suddivisione in stadi, ciò che corrisponde ad approssimare il diagramma continuo con la spezzata della fig. 4: a ogni ‛stadio' si espelle la struttura dello stadio esaurito. La determinazione, ossia l'‛ottimizzazione', del missile è uno dei compiti più importanti dell'ingegnere missilista, e la sua trattazione esula largamente dai nostri scopi. Quanto detto giustifica peraltro la classica configurazione dei veicoli di lancio in stadi.
La fig. 5 mostra schematicamente un missile tristadio a propellente liquido. Vi si notano: il primo stadio, con i serbatoi e gli ugelli di propulsione; l'elemento di separazione tra il primo e il secondo stadio; il secondo stadio, che ripete, in dimensioni generalmente minori, lo schema del primo; l'interstadio 2-3; il terzo stadio, pure simile ai primi due; l'alloggiamento del carico utile - il satellite artificiale o la sonda spaziale - con gli scudi termici, di forma e dimensioni variabili a seconda del carico utile. E necessario ricordare che uno stesso tipo di veicolo di lancio serve a mettere in orbita, o comunque a lanciare, carichi utili assai diversi per forma e dimensioni; quindi il vano relativo e gli scudi termici vanno di volta in volta progettati e adattati al missile. Nel caso di propellente solido, i serbatoi di propellente sono sostituiti dal ‛grano', di varia forma e sezione. Gli scudi termici servono a proteggere dal forte riscaldamento cinetico, che si ha durante l'attraversamento degli strati atmosferici, le delicate apparecchiature elettroniche del carico e l'eventuale equipaggio. Poiché il flusso termico prodotto è circa proporzionale a ρmV3 (dove ρ è la densità atmosferica, V la velocità, m ≃ 0,5), il massimo flusso non si ha negli strati dove è massima ρ (cioè al suolo), ma molto più alto (dove prevale l'effetto della velocità). Pertanto gli scudi termici vengono abbandonati, di solito, verso la fine della combustione del secondo stadio. La forma degli scudi è generalmente ‛a bulbo' (con spessore adeguato per assorbire il calore entrante senza un eccessivo aumento di temperatura), aperto lungo due o più generatrici, per permetterne lo sganciamento, In un missile della classe Atlas o Titan, di circa 200 t di peso al decollo, con carico utile di 1.600 kg, il peso degli scudi termici è di circa 800 kg.
b) Produzione della spinta
Nelle formule precedenti figura, come parametro di importanza fondamentale, la velocità di efflusso vr dei prodotti della combustione. Vediamo ora a quali altre grandezze essa a sua volta risulta collegata.
La fig. 6 mostra un condotto a sezione variabile A = A(x) sufficientemente piccola perché il moto del fluido al suo interno possa ritenersi praticamente unidimensionale. Nella sezione 0 (camera di combustione) il fluido ha velocità praticamente nulla, temperatura T0 e pressione p0; esso effiuisce poi lungo il condotto e le sue variabili di Stato (velocità v, pressione p, densità ρ, temperatura T) subiscono un'evoluzione; data la grande rapidità del fenomeno, si può ritenere che la trasformazione sia praticamente adiabatica. Le leggi del fenomeno sono le seguenti:




dove Cp è il calore specifico a pressione costante, k è il rapporto Cp/Cv, con Cv calore specifico a volume costante, ed R è la costante dei gas, legata alla costante universale R′ e al peso molecolare M dalla R = R′/M. Combinando opportunamente le equazioni precedenti, si può scrivere




Il fattore entro parentesi graffa nella (24) è composto di due termini, uno crescente e l'altro decrescente con v; fisicamente ciò significa che l'aumento di velocità da una parte favorisce una portata elevata e dall'altra, per effetto della forte espansione ad esso associata, dà luogo a una notevole riduzione della densità. Come sempre avviene quando agiscono due fattori contrastanti, si ha un massimo per un determinato valore di v che si trova derivando il termine rispetto a v e annullando la derivata. Si ottiene così il valore della velocità corrispondente:

Pertanto dalla (22) si ricava

Combinando la (25) e la (26) si ha
v²* = gCpT*(k − 1) = gkRT* (R = Cp − Cv). (27)
Questa espressione fornisce il classico valore della velocità del suono. Si ha così l'importantissimo risultato che il massimo del fattore in parola, e, quindi, il minimo di A(x) (sezione contratta), si ha in corrispondenza della velocità del suono. Successivamente continua l'espansione nella zona divergente del condotto, fino alla sezione terminale dell'ugello, dove la pressione pe è quella dell'ambiente esterno e dove quindi tutte le quantità risultano facilmente calcolabili. In particolare, poiché la pressione pe è assai bassa, è possibile trascurare, nella (22), il termine Te/T0 (dove Te è la temperatura nella sezione di uscita) e ottenere quindi la velocità di effiusso dalla

La velocità di efflusso al quadrato risulta quindi proporzionale al rapporto T0/M: si avrebbe quindi tutto l'interesse ad aumentare al massimo la temperatura di combustione, se non ostassero gravi problemi connessi con il raffreddamento e le sollecitazioni termiche e strutturali delle pareti dell'ugello, il quale ha la forma tipica mostrata nella fig. 6 (convergente-divergente).
Come si è già detto, la propulsione del missile è un esempio di propulsione a reazione. Il motore del missile prende il nome di ‛endoreattore', in quanto i prodotti della combustione provengono da una reazione che si manifesta all'interno del missile stesso. Invece, ad esempio, i reattori utilizzati nel velivolo a getto appartengono alla classe degli ‛esoreattori', in quanto uno dei reagenti (nella fattispecie l'aria) è esterno al sistema.
I razzi vengono classificati a seconda dei mezzi con cui viene generato il getto gassoso. Si hanno così razzi chimici, razzi nucleari e razzi con sistemi di propulsione elettrica. Questi ultimi due tipi sono usati prevalentemente per le applicazioni spaziali.
Nei razzi chimici, che sono di tipo tradizionale, il getto viene prodotto da una reazione chimica ad elevata temperatura T0; come si è visto, se il peso molecolare è M, l'energia cinetica ve2/2g dell'unità di massa espulsa è proporzionale a T0/M e la quantità ve, corretta mediante opportuni fattori, è la velocità caratteristica della reazione. In condizioni ideali, se si bruciano gí kg/s, l'impulso prodotto vale íve e pertanto si ha un impulso specifico ve/g, corrispondente a quello prodotto da 1 kg/s.
L'impulso specifico di un sistema di propellente è quindi determinato esclusivamente dalla temperatura della reazione.
I razzi chimici si dividono in due grandi categorie a seconda che il propellente sia liquido o solido; la differenza è radicale non solo per ciò che riguarda il sistema di propulsione, ma anche per l'architettura generale del veicolo e per i problemi dinamici relativi.
I propellenti liquidi possono essere monopropellenti e bipropellenti. Mla prima classe appartengono propellenti contenenti un agente ossidante e una materia combustibile, in una sostanza unica, che può essere una miscela di parecchi composti, oppure un materiale omogeneo (nitrometano e idrazina). L'inconveniente principale è la loro instabilità a temperatura elevata, il che porta alla decomposizione; è evidente peraltro la maggiore semplicità delle linee dei circuiti di alimentazione. I monopropellenti trovano impiego pratico solo nei piccoli razzi di controllo.
I bipropellenti sono costituiti da due diverse sostanze, contenute in serbatoi separati, che sono mescolate solo in camera di combustione. Ai propellenti liquidi veri e propri si aggiungono speciali sostanze catalizzatrici e acqua di raffreddamento.

Nella tab. I sono riportate le temperature di combustione e gli impulsi specifici di alcune coppie tipiche. Si vede come gli impulsi specifici siano centrati sul valore di 280 s, con cifre nettamente superiori per i propellenti ‛criogenici', come O2 liquido e H2 liquido, che presentano peraltro gravi inconvenienti di stabilità e vanno soggetti a perdite per vaporizzazione.
I propellenti liquidi si confrontano sulla base delle caratteristiche di efficienza, che si esprimono con i valori numerici dell'impulso specifico (e/o della velocità caratteristica); è evidente la convenienza di avere un basso peso molecolare. Proprietà fisiche indesiderabili sono la facilità di corrosione dei serbatoi e dei condotti, la facilità di esplosione, l'incendiabilità e la tossicità; proprietà fisiche desiderabili sono, invece, il basso punto di congelamento, che consente di operare a basse temperature, l'alto peso specifico, che permette di ridurre il volume dei serbatoi, la stabilità, la facilità di pompaggio (bassa tensione di vapore e viscosità), ecc.

La tab. II mostra, a titolo di confronto, alcuni parametri caratteristici del primo stadio del razzo Saturno, impiegato per il progetto Apollo, del secondo stadio dell'Atlas e di un piccolo razzo per il controllo d'assetto.
Assai importanti sono i sistemi di controllo della variazione della direzione di spinta.
In un motore a solido, il propellente viene inserito direttamente nella camera di combustione con un anticipo anche di alcuni anni rispetto al momento d'impiego. Lo schema di un motore del genere è indicato nella fig. 7. Elementi fondamentali sono l'involucro, il sistema di isolamento termico interno, la protezione termica esterna, il ‛grano' di propellente, il diaframma di arresto della combustione, l'accenditore.
Il motore a solido è quindi assai più semplice di quello a liquido, per l'assenza di serbatoi, pompe, condotti; d'altra parte, presenta minore flessibilità riguardo alla spinta, difficoltà di riaccensione e spegnimento e formidabili problemi tecnologici e costruttivi, derivanti dalle condizioni termiche del motore.
I propellenti solidi si classificano essenzialmente in propellenti a doppia base, costituiti da un grano omogeneo, in cui un unica sostanza contiene, intimamente associati, combustibile e ossidante (le proprietà esplosive della miscela rendono questi propellenti assai pericolosi) e propellenti compositi, in cui i cristalli di ossidante e il combustibile sono mescolati e tenuti assieme da un legante (binder) formato da una matrice plastica sintetica.
Di importanza fondamentale, per i propellenti solidi, è la velocità di combustione, dipendente naturalmente dal propellente e influenzata da vari fattori (v. Sutton e Ross, 1976).
La configurazione del grano regola la variazione temporale di spinta. Talvolta, a causa della variazione della superficie di combustione che regredisce secondo la propria normale, il prodotto della superficie per la velocità caratteristica può andare soggetto ad aumenti o diminuzioni non desiderati. Combinando alcuni tipi fondamentali di profili, si giunge a sezioni di varia forma, alcune delle quali sono indicate nella fig. 8. Vi è anche la possibilità di combustione in senso assiale (‛a sigaretta') e di combustione radiale combinata con combustione assiale.
L'involucro del motore è soggetto a elevate sollecitazioni, derivanti sia dai fenomeni di combustione che avvengono all'interno, sia dalle stesse accelerazioni cui è soggetto il veicolo. Si hanno quindi sforzi di compressione, flessione, taglio, ecc., accompagnati da riscaldamento (sia cinetico che derivante dal calore di combustione), oltre a fenomeni di corrosione e a quelli dovuti alle speciali condizioni operative dell'ambiente aerospaziale. Queste circostanze hanno condotto alla ricerca di tipi strutturali più avanzati. Tra questi vanno citati i moderni tipi di strutture filamentari costituiti da una matrice plastica contenente all'interno dei filamenti di vetro, che hanno una resistenza alla trazione dell'ordine di grandezza dei migliori materiali metallici. Si stanno ora sviluppando materiali compositi filamentari a fibre metalliche.
c) Dinamica del missile
Interesse fondamentale, come è ovvio, riveste lo studio della dinamica propria del razzo. Nella salita verso l'orbita da acquisire vanno distinte le fasi propulse (powered flight) da quelle - di solito assài più brevi - non propulse (coasting flight), che intercorrono tra lo spegnimento di uno stadio e l'accensione del successivo. La scelta della durata e dell'inizio dei periodi di accensione dei singoli stadi dipende dalla soluzione del problema dell'ottimizzazione della traiettoria, che è di estrema importanza per mettere in orbita, a parità di lanciatore, il massimo carico utile. Così pure è di grande importanza il programma di assetto, che corrisponde a stabilire la legge temporale di variazione dei tre angoli di Eulero (o di altri parametri di riferimento) rispetto a una terna inerziale. Tali programmi vanno poi realizzati per mezzo dei sistemi di guida e controllo.
Lo studio analitico della traiettoria del razzo si istituisce tenendo conto del fatto che la massa è fortemente variabile nel tempo (a causa della eiezione dei gas combusti) e che nel novero delle forze esterne vanno incluse la spinta, le forze aerodinamiche (per la parte atmosferica del volo) e il peso. Della prima ha interesse conoscere la variazione nel tempo per i vari stadi; per le seconde vanno forniti i valori dei coefficienti aerodinamici in funzione degli angoli di assetto del missile rispetto al vento relativo (e la situazione può essere tale da richiedere la conoscenza ditali coefficienti anche per incidenze dell'ordine di 90°, come avviene per gli effetti del vento trasversale) e, per il peso e altre forze (di scarsa importanza nelle fasi di volo propulso), bisogna stabilire l'inclinazione dell'asse, fornita appunto dal programma di volo. Inoltre è necessario tener conto di fattori ambientali, come la variazione della densità atmosferica con la quota (e, per gli strati più alti, anche con la stagione, l'ora di lancio, la latitudine) e la variazione del campo gravitazionale terrestre, anch'essa con la quota, oltre che con la latitudine e la longitudine. Tutti questi dati ambientali sono quindi oggetto di continue revisioni e aggiornamenti, conseguenti a misure sempre più raffinate.
Il problema principale della dinamica del missile non è però, come già si è detto, quello di determinare il moto del missile soggetto a forze note, ma quello di determinare il programma di guida e di propulsione, applicando le accennate tecniche di ottimizzazione al quadro analitico e meccanico sopra descritto. Nonostante la complessità del problema, appositi programmi di calcolo da tempo collaudati consentono una soluzione sicura. Comunque, rispetto alla traiettoria ‛nominale' determinata, è necessario valutare le conseguenze delle dispersioni, ossia l'effetto che possono avere, sulla traiettoria ‛effettiva', cause accidentali, come ad esempio funzionamenti non corretti dei propulsori, percentuale di incombusti nei propellenti solidi, cattivo funzionamento dei controlli, ecc. Tali dispersioni sono di importanza fondamentale non solo per il successo della missione, ma anche per motivi di sicurezza, essendo in ogni caso necessaria una valutazione dei cerchi di ricaduta dei singoli stadi. La fig. 9 mostra schematicamente la traiettoria di un missile tristadio, con l'indicazione delle curve di ricaduta degli stadi combusti e degli scudi termici. I tondini al piede di ognuna di tali curve corrispondono ai cerchi di dispersione sopra citati.
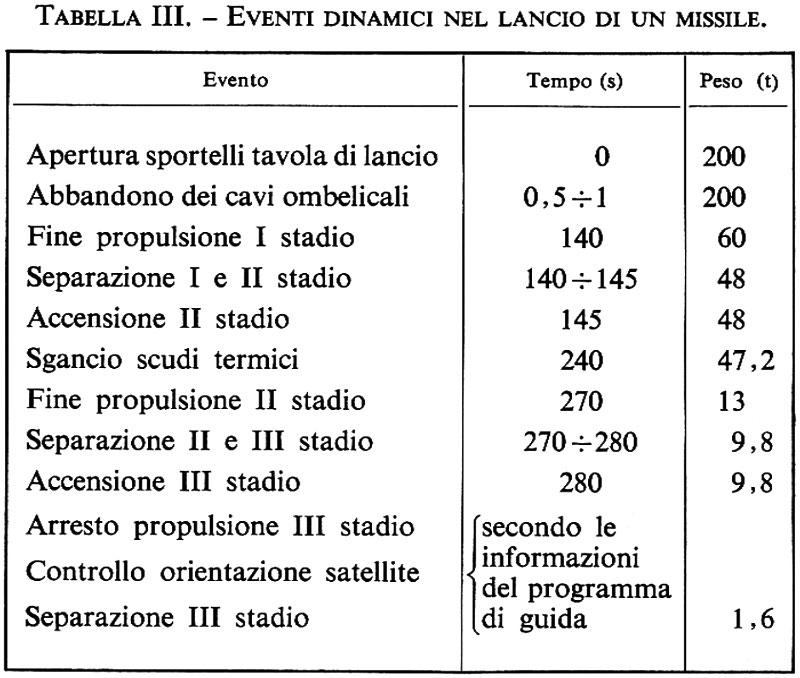
La tab. III riporta, a titolo indicativo, la sequenza dei singoli eventi dinamici e i tempi in cui tali eventi si verificano; nell'ultima colonna si forniscono, sempre in forma estremamente indicativa, i pesi residui dopo la combustione e lo sganciamento dei singoli stadi. Si rileva così la forte variabilità della massa nel tempo.
I risultati dello studio della dinamica di un missile sono di solito riassunti in un grafico del tipo di quello indicato nella fig. 10, che fornisce i valori del carico utile, U, da porre in orbita, in funzione dell'altezza, A, dell'apogeo: ciascuna curva corrisponde ovviamente a un valore dell'altezza del perigeo (curve P1, P2, P3). Le curve si arrestano naturalmente sulla curva, Γ, luogo dei punti in cui le due quote coincidono (a sinistra di essa, perigeo e apogeo scambierebbero i loro ruoli). Esiste in realtà, per ogni missile, un'infinità di diagrammi del tipo di quello della fig. 10, ciascuno corrispondente a una direzione di lancio e quindi a un'utilizzazione diversa della componente della velocità di rotazione terrestre. Tale componente è massima nei lanci verso est, ciò che ne spiega la grande diffusione; per lanci verso nord la riduzione del carico utile è dell'ordine del 15%.
L'attuale tendenza a inviare satelliti applicativi (per telecomunicazioni, previsioni meteorologiche, rilevazioni di risorse terrestri; v. cap. 4, È g) su orbita equatoriale rende necessaria una correzione di rotta in senso azimutale, per mezzo di una complessa manovra che prende il nome di doglegging, ossia ‛a zampa di cane', dalla forma della proiezione della traiettoria del missile (v. fig. 11); questa manovra complicata, difficile e dispendiosa si evita effettuando il lancio da un poligono equatoriale, che deve, per motivi di sicurezza, avere un ampio spazio libero (di mare o di deserto) verso est. L'Italia è stata in questo campo all'avanguardia, avendo realizzato il primo poligono equatoriale (base su piattaforma al largo delle coste del Kenya) nel corso del programma spaziale S. Marco, sin dal 1963. Altri poligoni equatoriali, come quello francese della Guyana, sono stati costruiti in seguito. In ogni caso è necessaria un'opportuna opera di sorveglianza, così come è necessario avvisare gli abitanti, ed eventualmente i mezzi navali, delle zone interessate dalla ricaduta degli stadi. Ciò fa comprendere l'importanza della suddetta analisi delle dispersioni e, insieme, l'impossibilità di utilizzare poligoni che a prima vista sembrerebbero adatti.
Il sistema di guida e controllo ha lo scopo di assicurare in volo l'effettiva rispondenza dell'assetto del missile alla legge precalcolata, nei limiti di scarto tollerabili. Il sistema di guida riceve informazioni relative all'assetto, le elabora e fornisce agli organi di controllo gli ordini necessari per ottenere le correzioni desiderate. (Il termine ‛controllo' va qui inteso nel senso anglosassone di ‛comando' e non in quello italiano di ‛verifica').
Altro sistema fondamentale è quello della logica di accensione e di spegnimento degli stadi e di sganciamento degli stadi combusti e degli scudi termici.
In generale, i missili di una certa importanza sono dotati di antenna radar destinata alla localizzazione da terra della posizione effettiva, la cui individuazione serve a verificare la traiettoria e a inviare il comando di distruzione da terra nel caso di deviazione intollerabile e, quindi, di missione fallita e pericolosa per la sicurezza nella regione del poligono. Si ha anche un circuito di distruzione automatico (in caso di funzionamento normale tale circuito riceve dal calcolatore di bordo un segnale di inibizione di distruzione, che viene interrotto, per esempio, nel caso di separazione intempestiva di due stadi). La distruzione si provoca, per esempio, facendo esplodere un proiettile lanciato da un cannoncino all'interno dei serbatoi di propellente (v. Sutton e Ross, 1976).
Si hanno infine circuiti di telemisura destinati a inviare a terra informazioni riguardanti le grandezze meccaniche (accelerazioni) relative al missile e i dati ‛ambientali' (temperatura in camera di combustione, pressione delle pompe di alimentazione, ecc.). Tali informazioni sono di vitale importanza nei voli di prova, ossia nelle fasi di qualificazione del prototipo.
La fig. 12 mostra lo schema strutturale di uno stadio. La parte anteriore, che serve per il collegamento con l'elemento interstadio (o con l'alloggiamento del carico utile, nel caso dell'ultimo stadio), è realizzata di solito in lega leggera con profilati longitudinali di rinforzo, secondo una classica concezione aeronautica (salvo l'assenza delle ordinate trasversali; v. fig. 13). Una struttura analoga separa le strutture dei due serbatoi, in lamiera d'acciaio con rivestimento protettivo interno in alluminio; il serbatoio comprende una parte cilindrica e due fondi ellittici; un elemento a briglia assicura il collegamento dei fondi col corpo cilindrico (a mezzo saldatura) e del serbatoio coi rivestimenti in lamiera rinforzata.
Speciale attenzione va riservata al castello motore, costituito da travi di forza unite al fondo del castello stesso, alle cui estremità sono applicati gli sforzi imponenti trasmessi dai razzi di propulsione. Tali sforzi, indicati con S nella fig. 14, vengono ripartiti sulla lamiera del castello, che è talvolta divisa in due pezzi sovrapposti per facilitare la distribuzione uniforme degli sforzi stessi.
Per un missile hanno grande importanza gli effetti di vibrazione e i conseguenti problemi di stabilità, derivanti dall'accoppiamento delle varie parti del sistema.
Il primo problema da prendere in esame è la ricerca dei modi fondamentali e delle frequenze strutturali proprie. La moderna tecnica degli elementi finiti consente oggi una valutazione assai precisa di tali grandezze; è necessario comunque tener conto, oltre che della flessibilità e della massa strutturale, anche della massa dei propellenti. Tale massa, nel caso di propellenti liquidi, provoca il fenomeno indicato come ‛sciacquio' (sloshing), che introduce modi aggiuntivi e, spesso, pericolosi, perché verificantisi a frequenze piuttosto basse.
Su gran parte dei razzi a liquido sono stati osservati fenomeni di instabilità longitudinale (l'effetto è simile a quello dei cavallini a sussulto delle giostre, o pogo). Si tratta di un classico processo di instabilità che riguarda gli accoppiamenti tra struttura, alimentazione, camera di combustione. Il ciclo si produce quando, per una causa qualunque, si generano vibrazioni longitudinali della struttura, che provocano di conseguenza fluttuazione di pressione nei condotti di alimentazione dei propellenti, con conseguenti fluttuazioni di spinta, che agiscono a loro volta sulla struttura, chiudendo cosi il loop indicato. L'unica causa dissipativa è lo smorzamento strutturale: se questo è insufficiente, nasce il processo instabile. Per controbilanciare questo effetto si usano sistemi a forte capacità che smorzano le oscillazioni nella linea di alimentazione (poga correction devices).
4. La tecnica orbitale
a) Principali fenomeni orbitali
Consideriamo anzitutto il caso di un'orbita circolare: un satellite S di massa m, che si muove intorno al corpo principale T, di massa assai maggiore, su un'orbita circolare di raggio R. L'accelerazione di gravità del campo di T, nel caso di distribuzione simmetrica delle masse di T, vale

dove g0 è la gravità alla quota di riferimento, R0 (per esempio sulla superficie di T). L'orbita di S è di equilibrio se l'accelerazione centripeta uguaglia la forza d'attrazione divisa per la massa, cioè se

Dalla (30) si ottiene la ben nota legge
ω = (g0/R0)1/2 (R0/R)3/2. (31)
Più esattamente, se in un certo istante S si trova in un punto a distanza R dal centro di T ed è dotato di velocità
v = ωR = (g0R0)1/2 (R0/R)1/2 (32)
puramente normale al raggio TS, allora, in assenza di altre perturbazioni, S continua a muoversi indefinitamente di moto circ'olare uniforme intorno a T con velocità angolare ω data dalla (31). La (31) mette bene in evidenza come a ogni distanza o quota sia associata una velocità angolare, che decresce all'aumentare della quota stessa. Particolare interesse ha, tra le altre, la ‛quota geostazionaria' Rg, ossia quella alla quale ω risulta uguale alla velocità Ω di rotazione di T attorno al proprio asse.
Quando T è la Terra si ha: g0 = 9,79807 ms-2, R0 = 6.378 km e Ω = 2π/86.400 s-1. Si ha perciò
ω = 1,2394 × 10-3 (R0/R)3/2 s-1
v = 7,905 (R0/R)1/2 kms-1
Rg = 42.239 km = 6,622 raggi terrestri.
L'importanza del concetto di quota geostazionaria risiede nel fatto che un satellite ruotante su un'orbita equatoriale, a quella quota, percorre un'orbita ‛geosincrona', ossia tale che il satellite stesso è immobile rispetto alla Terra e sovrasta sempre lo stesso punto dell'equatore. È questa la posizione ideale per i satelliti applicativi, quali, ad esempio, quelli per telecomunicazioni.
Esaminando le cose un po' più in dettaglio, si osservano alcune differenze significative rispetto alla situazione descritta dallo schema semplicissimo fin qui considerato. Anzitutto, poiché il satellite ha dimensioni finite, e non infinitesime, la gravità apparente

risulta nulla solo per un particolare valore R* di R, ossia per quello che soddisfa la (30). In altre parole, poiché ciascun elemento del corpo ha dal centro di T una diversa distanza R, su ciascun elemento agisce un diverso valore della gravità apparente: per gli elementi che soddisfano la (30) la gravità apparente è nulla, mentre per tutti gli altri ga è piccolissima, ma non nulla.
Esaminiamo ancora le cose seguendo uno schema semplice, ossia considerando un'asta diretta secondo una direzione radiale uscente da T, a distanza R1, di lunghezza l ≪ R1 e di cui μ(z) sia la massa per unità di lunghezza (v. fig. 15). All'equilibrio deve essere nulla la risultante della gravità apparente:

Questa condizione fissa il valore di ω all'equilibrio:
Quando sia l → 0, l'equazione precedente tende alla (30). Considerando, in particolare, il caso μ(z) = cost., ossia il caso di un'asta uniforme, si ha

Quindi, il punto P*, in cui la gravità apparente è effettivamente nulla, è quello posto a distanza

dal centro di T e a distanza

dalla base dell'asta. In ogni altro punto della stessa asta, posto
z′ = z − d* (39)
si ha la gravità apparente

Sviluppando in serie di potenze del rapporto (d* + z′)/R1 e fermandosi al primo ordine, data la piccolezza del rapporto stesso, poiché ga(0) = 0, si ottiene il risultato finale

Non si ha quindi un completo annullamento della gravità apparente, salvo che per z′ = 0, ma una sua fortissima riduzione (microgravità), legata soprattutto al fattore z′/R1, in quanto l'altro fattore (R0/R1)2 tiene conto della naturale riduzione della gravità con la quota e non è legato al movimento orbitale.
Di grande interesse sono le implicazioni della microgravità, in particolare nell'ambito della scienza dei materiali.
A. Sintesi cristallina. È nota da tempo la grande influenza che la gravità esercita sulla formazione dei cristalli in vicinanza del punto critico, a causa della presenza di fasi diverse e dei fenomeni chimico-fisici che ne conseguono. Si possono ottenere campioni di materiale di estrema purezza, insieme a cristalli di grandi dimensioni, operando in ambiente a microgravità, in cui i fenomeni di contaminazione vengono rallentati. Un esempio è rappresentato dalla produzione di ioduro di mercurio.
B. In certi processi di fusione di materiali ceramici, avvengono fenomeni di reazione con le pareti del crogiuolo, il che rende praticamente impossibile la fusione stessa. Nello spazio, a causa dell'assenza di gravità, si può far fondere il materiale senza ricorrere al crogiuolo, situandolo, per esempio, al centro del veicolo spaziale (v. fig. 16).
C. In condizioni di microgravità è pure possibile la costituzione di leghe formate da coppie, o terne, di sostanze non miscibili sulla Terra a causa della gravità che ne provoca la separazione in strati di peso specifico crescente dall'alto verso il basso.
D. Un aspetto particolarmente interessante dei fenomeni di microgravità si ha in connessione con la presenza di liquidi a bordo del veicolo spaziale. Si consideri un serbatoio, di sezione piccolissima, il cui ‛pelo libero' sia posto a distanza h0 dal punto P* di gravità apparente nulla, di cui abbiamo già indicato con R* la distanza dal centro della Terra (v. fig. 17). Per un elemento di lunghezza dz′, indicando con p la pressione del liquido e con ρ la densità, la ben nota equazione dell'idrostatica si scrive:

Tenendo conto che, nel caso attuale, al posto di g bisogna introdurre ga (v. la 41), si ha, integrando e imponendo la condizione di pelo libero:

Quindi, dovendo essere in ogni caso p > 0, si ha ∣ z′ ∣ > ∣ h0 ∣ ; in altre parole, come indica la fig. 17, se il serbatoio si trova al disotto della quota R*, il ‛fondo' è in basso, altrimenti è in alto. È facile quindi immaginare la grande influenza che fenomeni di questo genere possono avere sugli organismi viventi e sui liquidi in essi contenuti, con importanti riflessi sulle loro funzioni biologiche. Il fenomeno è estremamente complesso e il pelo libero non è, in generale, una superficie piana.
Torniamo ora all'esempio della fig. 15 per esaminare un altro importante effetto che si ha in orbita: la cosiddetta ‛coppia gravitazionale'. Nella fig. 18, l'asta già considerata nella fig. 15 si trova deviata, rispetto alla verticale, di un angolo ϕ, per cui un suo punto generico, posto a distanza z′ dal baricentro, ha, rispetto a un sistema solidale con la Terra, le coordinate

Pertanto, trascurando quantità dell'ordine di (z′/R*)2, la forza gravitazionale (vera e non apparente) agente sull'elemento di massa dμ che si trova nella posizione z′, ha il valore

Calcolandone il momento rispetto al centro di massa, si trova facilmente

Sviluppando in serie il denominatore dell'espressione precedente e trascurando ancora i termini dell'ordine di (z′/R)2, otteniamo

Integriamo rispetto a tutta l'asta, tenendo conto che, avendo contato le z′ a partire dal baricentro, si ha ∫ z′dμ = 0, mentre ∫ z′2dμ è il momento d'inerzia J dell'asta rispetto al suo asse di rotazione; si ha quindi l'espressione finale della coppia gravitazionale:

Per ciò che riguarda il contributo dell'altro termine della gravità apparente (ossia la forza centrifuga dovuta al moto dei vari punti dell'asta), è possibile vedere (analiticamente o anche sinteticamente) che esso si compone di due termini, uno derivante dall'accelerazione di trascinamento, l'altro dall'accelerazione di Coriolis. Il momento risultante del primo è evidentemente zero, per motivi di simmetria, mentre, per il secondo, è zero il momento delle singole forze d'inerzia, in quanto la velocità di rotazione è normale al piano, la velocità relativa è normale all'asta e quindi la forza di Coriolis è diretta secondo l'asta. Quindi, nel caso bidimensionale fin qui considerato, il contributo delle forze centrifughe è zero, e l'equazione del moto di rotazione per l'asta si scrive:

Nel caso tridimensionale la situazione è più complicata e si ha anche un contributo delle forze centrifughe. Comunque, osservando l'espressione della CG e ripensando al modo in cui essa è stata ottenuta, se ne capisce l'origine, legata non tanto alla gravità, quanto alla sua variazione spaziale, ossia al suo gradiente. Difatti, dei due termini che figurano nella (47), uno rappresenta la gravità uniforme e non dà quindi evidentemente alcun momento; invece la coppia gravitazionale è legata al secondo termine, che rappresenta appunto il gradiente di gravità. La coppia gravitazionale è generalmente assai piccola: infatti, poiché J è dell'ordine della massa del corpo per il quadrato della dimensione trasversale, la coppia stessa è dell'ordine della dimensione trasversale divisa per R*, ossia dell'ordine di una quantità che abbiamo ripetutamente trascurato in confronto all'unità, ma che nel caso attuale non è più trascurabile, in quanto la coppia del gradiente di gravità è l'unica presente; in altre parole, pur essendo piccolissima, la coppia gravitazionale è l'unica responsabile del movimento di rotazione dell'asta.
Le condizioni di stabilità del sistema soggetto alla coppia gravitazionale si studiano a partire dalla (49). Vi sono due posizioni di equilibrio (corrispondenti all'annullamento della coppia gravitazionale):


Per esaminare la stabilità, operando alla Lyapunov in vicinanza della prima soluzione, indicato con ε lo scostamento dalla posizione di equilibrio, si ha sen ϕ ≃ ε e cos ϕ ≃ 1 e quindi

Nel secondo caso si avrebbe cos ϕ ≃ − ε e sen ϕ ≃ 1 e quindi

Pertanto, nella prima posizione il sistema risulta stabile e il movimento è del tipo
ε = A cos ωt + B sen ωt, (54)
con

e A e B costanti da determinare in base alle condizioni iniziali. Nella seconda posizione si ha instabilità.
Al solito, queste conclusioni sono esatte solo nel caso semplificato da noi esaminato, ma servono per mettere in evidenza il ruolo (stabilizzante o destabilizzante) che il gradiente di gravità svolge in condizioni di dinamica orbitale. Questa capacità di stabilizzazione, in opportune condizioni, è utilizzata per certi satelliti speciali.
Il valore numerico della costante ω che compare nella (55) è, per la Terra,

cui corrisponde il periodo

b) Previsioni orbitali
Lo studio della dinamica di un satellite artificiale è semplificato dal fatto che, essendo la massa del satellite S estremamente piccola rispetto a quella della Terra, il moto di quest'ultima non ne è influenzato (problema ristretto dei due corpi). Si indichi allora con r(t) la posizione di 5 rispetto a una terna inerziale ???OUT-t??? con origine nel centro O della Terra T. L'equazione del moto del satellite è

dove m è la massa di 5 ed F è la forza esterna cui esso è soggetto. La (58) va completata con i valori iniziali di r e di dr/dt. Una forma alternativa della (58) si ha considerando il vettore a sei componenti
e l'altro y (pure a sei componenti), che ha le prime tre componenti pari alle componenti della velocità sui tre assi coordinati, uscenti da un punto generico, e le altre tre pari a quelle di F/m. Con tali notazioni la (58) si scrive

La (58a) va completata mediante il valore iniziale di s. La (58a) è la versione della (58) scritta in forma normale, ossia ridotta a equazioni del primo ordine.
La (58) fornisce tre equazioni scalari del secondo ordine, quando venga proiettata sul sistema inerziale di riferimento. Ad esempio, se il sistema è quello geocentrico (v. fig. 19), si hanno le
cui vanno associati, naturalmente, i valori iniziali di r, η, θ e delle rispettive derivate temporali.
Considerazioni analoghe Possono svolgersi per il caso di un sistema trirettangolo cartesiano.
Il caso kepleriano si ha quando la forza F è puramente radiale e ha valore −mν/r2, per cui la (58) si scrive:

dove ν è la costante gravitazionale. Nel caso della Terra, si ha ν = g0R²0 = 3,986 × 105 km3 s-2. Questa condizione corrisponde, come è ben noto, al caso in cui la forza d'attrazione sia esercitata da un corpo a simmetria sferica, anche se non uniforme.
La soluzione del problema del moto in questo caso è ben nota (v. cap. 5, § a). L'orbita risulta essere una conica, che, in questa sede, supporremo essere senz'altro una ellisse ξ. Essa è individuata da sei parametri, equivalenti alle sei condizioni iniziali da associare alla (60).
Due parametri definiscono il piano orbitale π0: l'inclinazione i di π0 rispetto al piano equatoriale terrestre πe e l'angolo Ω che la retta ON, intersezione di π0 con πe (orientata verso il punto in cui il satellite artificiale è ascendente), o ‛retta dei nodi', forma con una direzione fissa di riferimento (per es., l'equinozio vernale medio E) (v. fig. 20).
Tre altri parametri definiscono ξ nel suo piano. L'equazione della conica è

dove e è l'eccentricità di ξ, p il semilatus rectum (v. fig. 21) e ψ è contata nel piano della conica a partire dal perigeo P. P è il punto in cui la distanza r assume il valore minimo

mentre il valore massimo si ha all'apogeo A:

Infine il semiasse maggiore dell'ellisse vale a = (rP + rA)/2, cioè

Per fissare poi la conica nel suo piano è necessario anche fornire la posizione angolare ω del perigeo (argomento del perigeo) rispetto a una direzione assegnata, per esempio la linea nodale. I parametri p, e, ω, 0 equivalenti, definiscono la conica nel suo piano. Il sesto parametro è temporale e definisce l'istante di passaggio del satellite artificiale al suo perigeo.
Nell'ottica kepleriana si hanno anche importanti relazioni di carattere generale. Si ha anzitutto l'integrale delle forze vive

che è ottenibile dalla (60) moltiplicando ambedue i membri scalarmente per dr; d'altronde, l'integrale delle forze vive sussiste, come è ben noto, per ogni sistema (o punto) materiale meccanico soggetto a forze conservative, come è appunto la forza newtoniana gravitazionale, alla quale corrisponde il potenziale ν/r.
Lo schema kepleriano viene notevolmente complicato dalla presenza di forze diverse dalla semplice forza newtoniana che interviene nella (60); lo studio delle perturbazioni relative è di solito condotto descrivendo ciascuna ditali forze mediante un apposito modello matematico, introducendo tale modello nella (58) e procedendo all'integrazione numerica del sistema differenziale così ottenuto. È questo il modo effettivamente seguito nella costruzione delle ‛effemeridi' del satellite, che sono di grande importanza per la previsione dell'orbita. Assai seguito è il metodo dei parametri, ben noto da tempo agli studiosi di meccanica celeste e rielaborato negli ultimi anni per tener conto di perturbazioni speciali, come la resistenza aerodinamica. Dal punto di vista analitico, la traiettoria effettiva è concepita come una successione di archi infinitesimi di ellissi kepleriane, a parametri variabili istante per istante. Detto quindi P(t) il vettore dei sei parametri suddetti, le relazioni della conica istantanea si scrivono s = s(P(t), t), e sono di carattere puramente geometrico e cinematico. Inoltre il vettore y può decomporsi nel termine kepleriano (che sarebbe più esatto definire newtoniano) yK e in quello di disturbo yD. Sostituendo nella (58a), si ha

dove ∂s/∂P è una matrice il cui elemento ij vale ∂si/∂Pj. Nell'equazione precedente il termine ∂s/∂t è formalmente quello che si ha nel caso kepleriano, ossia quando il vettore P è costante. Pertanto il termine in parola è identico a ψK e si ha

In questo modo le incognite del problema non sono più le coordinate s(t), ma i parametri istantanei della conica P(t). Rispetto all'impostazione col metodo delle coordinate, il sistema differenziale (67) ha il vantaggio di operare con quantità assai più lentamente variabili: basti pensare che nel caso kepleriano la (67) assume l'aspetto semplicissimo P• = 0.
Le forze perturbatrici sono in genere assai piccole in confronto alla forza newtoniana; tuttavia esse hanno grande importanza, poiché sono le uniche responsabili, come si è visto, delle variazioni dei parametri e, quindi, del tipo di orbita. Pertanto la ricerca di metodi numerici destinati a studiarne gli effetti è stata ed è tuttora in pieno sviluppo.
In sede preliminare, in luogo dell'integrazione diretta della (58) o delle (66), si preferisce ricorrere a formulette semplici, che danno valori approssimati, e, in generale, sufficienti ai fini pratici, degli effetti in questione.
Campo gravitazionale. - Il potenziale del campo gravitazionale terrestre si scrive:
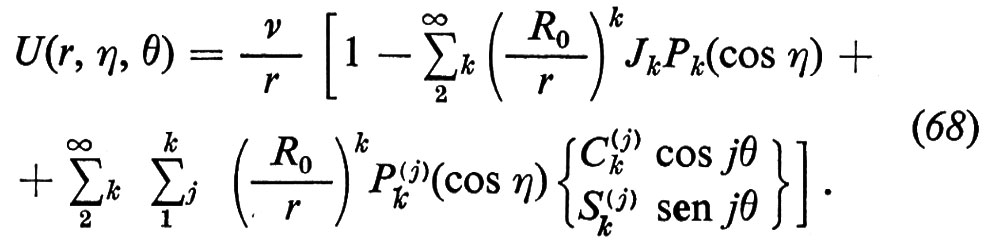
Nella (68), il primo termine è quello newtoniano, gli altri sono le armoniche superiori. In essi R0 è il raggio equatoriale terrestre, η è la latitudine, θ la longitudine, Pk(j) la funzione associata di Legendre di prima specie, di ordine j e di grado k, Pk è il k-esimo polinomio di Legendre. Far partire la prima sommatoria da 2 corrisponde a prendere come origine il baricentro terrestre; la seconda sommatoria tiene conto della ‛ellitticità' dell'equatore. I coefficienti Jk, Ck(j) Sk(j) sono stati dedotti dall'analisi delle anomalie delle orbite dei satelliti artificiali, fino a circa una quarantina di valori.
Il coefficiente J2 = 1,087 × 10-3 è noto con buona approssimazione: il termine ad esso relativo corrisponde all'effetto dello schiacciamento (oblateness) della Terra.
Si hanno variazioni nell'argomento del perigeo, nella longitudine del nodo ascendente, nel tempo di passaggio al perigeo, che è conveniente scrivere sotto forma di medie durante un'orbita:
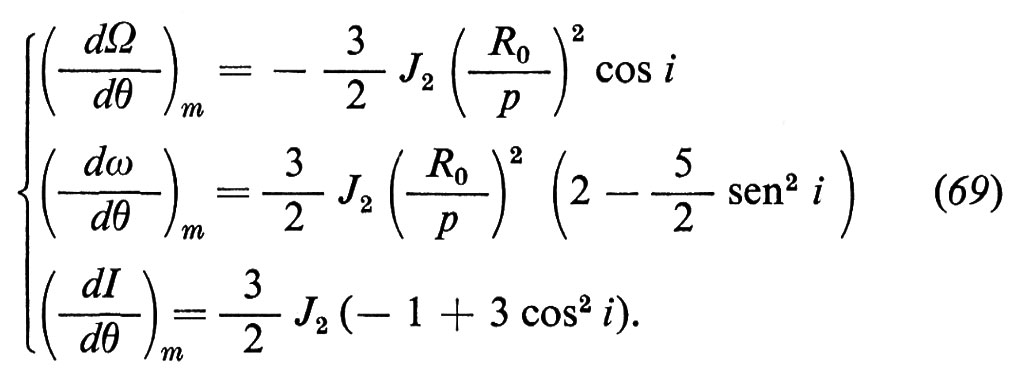
Per esempio, con i = 0 e con un'orbita circolare di 500 km di quota, si avrebbe (dΩ/dθ)m = − 0,00138, corrispondente a circa 0,5° per orbita; poiché si avrebbero circa 15,2 orbite al giorno, il movimento retrogrado del nodo sarebbe di circa 7,6°, un valore, come si vede, assai importante. Per ω lo spostamento, questa volta in avanti, sarebbe doppio e la somma algebrica dei due (valida, naturalmente, solo nel caso di un'orbita equatoriale) corrisponderebbe a un movimento complessivo in avanti del perigeo pari a ≃ 7,6°. Si noti che dω/dθ è negativo per i compreso tra −63,4° e 63,4° (naturalmente per i 〈 0 l'orbita è retrograda). Analogo effetto si ha su dI/dθ per i ≤ 54,7°.
Alle perturbazioni secolari si sovrappongono anche perturbazioni a carattere periodico da tempo note e studiate: le più importanti sono quelle derivanti dagli effetti a lungo periodo, dell'ordine di grandezza della precessione del perigeo o di suoi multipli; tuttavia, nei satelliti stazionari, che debbono assolutamente mantenere invariata la posizione sul punto scelto dell'equatore, anche gli effetti a corto periodo possono essere importanti.
A queste perturbazioni contribuiscono anche le armoniche superiori del campo gravitazionale: tale è, per esempio, il caso della terza armonica, J3 = (− 2,3 ± 0,2) × 10-6, che deriva dall'asimmetria delle masse terrestri rispetto all'equatore (pear-shape effect o ‛effetto della forma a pera'); essa non contribuisce al moto secolare del nodo ascendente e del perigeo, ma induce movimenti periodici che hanno il periodo del moto del perigeo. La quarta armonica, J4, produce lo stesso effetto, oltre a fornire un contributo di natura secolare, che però è piccolo in confronto a quello prodotto da J2. Per le altre armoniche il discorso diventa assai difficile in termini di effetti parziali; peraltro la considerazione completa delle armoniche gravitazionali fa parte dei comuni softwares applicativi.
Attrazione dei corpi celesti. - Un tipo di perturbazione nasce dalla circostanza che il satellite è sottoposto, da parte dei corpi celesti, a forze di attrazione diverse da quelle cui sarebbe sottoposto se fosse situato al centro della Terra: non è tanto quindi la forza in se stessa quello che conta, quanto la differenza tra quella cui è sottoposto il satellite e quella cui è sottoposta la Terra. Questo fatto, collegato con il fatto che, come indica la (68), l'effetto delle armoniche superiori diminuisce con l'altezza orbitale (legata al raggio r), fa sì che l'attrazione dei corpi celesti sia una delle maggiori fonti di perturbazione per i satelliti alti (per es. per un satellite sincrono), mentre risulta trascurabile per quelli su orbita bassa.
Resistenza aerodinamica. - Il modello atmosferico a quote superiori ai 200 km è estremamente incerto e dominato da fattori casuali. Vi hanno luogo fenomeni pressoché sconosciuti, che producono variazioni della densità a carattere giornaliero, mensile, semiannuale, annuale, casuale. Un fondamentale contributo alla comprensione di questi fenomeni hanno portato gli esperimenti del satellite italiano San Marco. Comunque non si può parlare con sicurezza di quota alla quale l'effetto della resistenza aerodinamica viene a mancare, ma, piuttosto, di decremento continuo dell'effetto stesso.
La resistenza aerodinamica è espressa, come sempre, dalla

in cui A è l'area di una superficie di riferimento del satellite, V la sua velocità e ρ la densità del mezzo. Il coefficiente di resistenza, CD, dipende fortemente dall'assetto del satellite. L'effetto principale è comunque la contrazione dell'asse maggiore dell'orbita

ρ- è la densità media lungo l'orbita, ò è la media dei raggi orbitali lungo l'orbita stessa e B = CDA/2m è il parametro fondamentale (area/massa) da cui dipende il fenomeno. La contrazione dell'asse maggiore si accompagna a una crescente diminuzione dell'eccentricità (circolarizzazione) dell'orbita, legata alla circostanza che la massima resistenza aerodinamica si ha al perigeo, che è il punto più basso dell'orbita; perciò il satellite, quando lascia la zona intorno al perigeo (v. fig. 22), ha perduto una parte della sua energia cinetica e non può quindi più risalire all'apogeo precedente. All'apogeo, invece, questi fenomeni avvengono con assai minore intensità e, quindi, l'abbassamento del perigeo per orbita è di regola assai inferiore a quello dell'apogeo; naturalmente, l'entità della differenza (o, meglio, del rapporto) dei due abbassamenti dipende dall'eccentricità della conica kepleriana. Comunque, a un certo punto, si giunge al rientro del satellite.
La resistenza aerodinamica provoca una tipica perturbazione ‛secolare', ossia tale che i suoi effetti si sommano nel tempo: quindi, anche se estremamente piccola, essa è responsabile del valore finito del tempo di permanenza in orbita (‛vita orbitale'). Peraltro anche altre perturbazioni possono contribuire a questo effetto; il campo gravitazionale terrestre, per esempio, può spostare il perigeo in zone di maggiore densità e così accelerare, o ritardare, il rientro. Le incertezze su ρ, su CD e sull'assetto rendono assai poco sicura in generale un'analisi di lifetime, che può risultare errata per uno o due ordini di grandezza. Per avere un'idea dell'importanza dell'effetto della resistenza, basti pensare che, nel caso di un'orbita con perigeo a 200 km e apogeo a 500 km, per un satellite di forma sferica di 1 m di diametro e del peso di 200 kg, si avrebbe inizialmente un abbassamento del perigeo di 10 m e dell'apogeo di circa 150 m per orbita; l'abbassamento del perigeo porterebbe rapidamente il satellite in zone a più elevata densità e in circa un mese la velocità di discesa risulterebbe raddoppiata e così via.
Pressione di radiazione. Quando un fotone di origine solare incontra un satellite e ne viene riflesso o assorbito, provoca una variazione di quantità di moto del satellite estremamente piccola, ma, anche questa, di tipo secolare, e quindi, a lungo andare, significativa. La pressione solare, al livello terrestre, è di 9,2 × 10-6 newton/m2; per satelliti con alti valori di B la pressione suddetta può modificare la quota del perigeo di varie centinaia di km, alzandola o abbassandola a seconda della forma e dell'orientazione dell'orbita rispetto alla direzione di provenienza dei raggi solari.
c) Manovre orbitali; cambiamento di orbita
Per vari motivi dipendenti dall'uso cui il satellite è destinato, e a seconda delle varie fasi del volo, può essere necessario modificare l'orbita in uno o più dei suoi parametri: una manovra del genere è tipica, per esempio, quando si voglia inserire un satellite in orbita sincrona. In certi casi (per esempio nel caso di sistemi di satelliti per telecomunicazioni) può essere necessaria una manovra che sposti il satellite lungo la sua orbita in una nuova posizione più conveniente per gli scopi operativi: si cambia allora solo il tempo di passaggio al perigeo.
Di solito, per ottenere questi cambiamenti orbitali, si imprime al satellite - anche ripetutamente - un impulso, ΔI, fornito da un apposito sistema di propulsione ausiliario, che modifica bruscamente la velocità del satellite di una quantità ΔI/m (m è la massa del satellite) e lo porta sulla nuova orbita desiderata. In pratica, evidentemente, si avrà una durata finita (per quanto brevissima) del tempo di applicazione della spinta, e di conseguenza una variazione graduale (anche se rapidissima) del vettore velocità. La scelta opportuna del numero, della durata e degli istanti di applicazione degli impulsi può semplificare notevolmente il problema e ridurre in misura drastica il consumo di propellente. Nasce così la necessità di formulare un programma ottimo di spinta. Nel seguito ci limiteremo a descrivere brevemente la possibilità offerta dall'applicazione di un impulso singolo.
Si consideri la fig. 23. Il satellite sta percorrendo la sua orbita ξI e, nel punto PI ≡ PII, ha velocità vI; applicando l'impulso ΔI, la velocità si modifica in vII. Dall'istante in cui riceve l'impulso il satellite percorre la nuova orbita ξII determinata dalla posizione del punto PII in cui è stato applicato l'impulso e dalla nuova velocità vII. Poiche', se si considera un caso piano, l'impulso ΔI dipende da due parametri (le sue due componenti), sarà possibile modificare solo due parametri della conica (per es., eccentricità e semiasse maggiore), che passerà, in ogni caso, per il punto iniziale. Qualunque ulteriore modifica non si può ottenere che con un altro impulso.
Un caso particolarmente interessante è rappresentato dal passaggio da un'orbita circolare a un'altra orbita circolare (v. fig. 24). In un punto della prima orbita ξI, si applica un impulso tangenziale, il cui valore è regolato in modo che la nuova orbita ξII (ellisse di Hohmann) abbia perigeo pari al raggio di ξI e apogeo pari al raggio dell'orbita finale ξIII. All'apogeo di ξII si applica il nuovo impulso che rende l'orbita finale circolare alla quota desiderata. È possibile dimostrare che il trasferimento via ellisse di Hohmann implica il minimo dispendio energetico. Questa manovra è simile a quella che si effettua per porre in orbita un satellite sincrono; in questo caso si inserisce il satellite direttamente sull'orbita ξII, che prende il nome di orbita di parcheggio. Durante l'orbita di parcheggio, che normalmente viene percorsa una diecina di volte, si effettuano misure particolari. Per modificare il piano orbitale è necessario applicare un impulso normale al piano stesso, secondo la semplice costruzione geometrica indicata nella fig. 25. L'impulso da applicare ha, per variazioni di inclinazione sufficientemente piccole, il valore mvΔi, dove v è l'intensità del vettore velocità (supposta invariata) prima e dopo l'impulso. Poiché la velocità raggiunge il valore minimo all'apogeo, è questo evidentemente il punto dove è più conveniente effettuare la manovra. Anche in questo caso, però, non è possibile controllare gli altri parametri, come la longitudine del nodo ascendente.
Un altro importantissimo tipo di manovra orbitale è il cosiddetto doeking, o ‛aggancio', fondamentale per la realizzazione di stazioni orbitali e, in generale, per il montaggio delle grandi piattaforme. La tecnica del docking mosse i suoi primi passi negli anni sessanta, con i voli Soyuz e Gemini, e oggi è notevolmente perfezionata e migliorata.
Anche questo problema può essere posto come un problema di ottimizzazione, nel senso che, nota la posizione del veicolo bersaglio, è possibile scegliere la posizione e l'istante in cui va iniziata la manovra di docking in modo tale che il consumo totale di propellente per raggiungere il bersaglio nelle condizioni volute risulti minimo.
Descriviamo ora una possibile tecnica di rendez-vous (v. fig. 26). Le due orbite, quella del bersaglio e quella dell'inseguitore, giacciono su due piani diversi, πB e πI formanti un angolo Δi. Quando l'inseguitore si trova nella posizione in cui il suo piano orbitale interseca quello del bersaglio, gli si applica un impulso normale che fa ruotare il piano dell'inseguitore dell'angolo necessario per portarlo a coincidere con quello del bersaglio. Successivamente si tratta di applicare impulsi (complanari) in modo da far coincidere le due orbite in un certo punto opportunamente scelto. Ovviamente, è assai delicata e importante la fase finale dell'aggancio, per cui sono necessari appositi sensori di distanza e di velocità e strumenti di controllo, che hanno lo scopo di consentire un aggancio sicuro e ‛dolce'.
Per dare un'idea della complessità della manovra, basti riflettere che, regolando la velocità di aggancio con mezzi automatici e manuali, si modifica contemporaneamente anche l'orbita, per cui è necessario l'uso di propulsori orizzontali e verticali; ciò influisce pesantemente sul consumo di propellente dei propulsori ausiliari.
d) Restituzione orbitale
La parola inglese tracking significa ‛inseguimento'; con questo termine si indica la tecnica che permette di ricavare informazioni sulla navigazione del satellite con mezzi prevalentemente di Terra. Il tracking serve in modo particolare per determinare l'orbita del satellite e, in questo caso, può essere definito come l'operazione inversa rispetto alla determinazione delle effemeridi.
In tutti i casi il satellite deve risultare ‛visibile' agli apparati di Terra in una certa zona dello spettro elettromagnetico; è anche necessario un certo tempo per la sua osservazione. Questo tempo può essere calcolato con l'aiuto di formule piuttosto complicate in funzione della posizione della stazione e dei parametri orbitali.
Il tracking ottico viene effettuato mediante osservazione visiva del satellite, con macchine speciali del tipo Baker-Nunn e registrazione delle immagini. I sistemi ottici consentono misure topocentriche assai accurate, però, d'altra parte, non permettono di misurare la distanza in modo diretto, ma solo attraverso successive elaborazioni (‛triangolazioni').
Esistono vari tipi di tracking per mezzo di radar. Ne descriviamo schematicamente due, avvertendo che la tecnica in questo settore è in continua evoluzione.
Nel tipo interferometrico (v. fig. 27), si hanno a Terra due antenne O1O2 a distanza L. Se l'inclinazione del satellite è α, Si ha O2P = L cos α; se inoltre la lunghezza d'onda del fronte è λ, lo sfasamento tra i segnali ricevuti dalle due stazioni è ϕ = O2P/2πλ; quindi, misurando ϕ, si ha α = − cos-1(2πϕλ/L). Misurando α su due basi perpendicolari, si ottiene la direzione del satellite (ma non, ovviamente, la sua distanza). Il sistema interferometrico è stato largamente usato in passato per satelliti su orbite basse, ma è del tutto inutile per satelliti che non trasmettono.
Nel tracking a effetto Doppler si misura la variazione di frequenza conseguente alla velocità di avvicinamento del satellite alla stazione. Se δ è la distanza OS (v. fig. 28), si ha, in base al ben noto principio Doppler, una variazione di frequenza Δf = f0 δ/c, dove f0 è la frequenza di trasmissione e c la velocità della luce; quindi Δf = (f0/c) VS sen α. A parità di altre condizioni, l'espressione precedente è funzione del parametro α: se ne può effettuare la derivata temporale, che risulta a sua volta funzione di α, e valutarne il valore massimo. Attraverso semplici operazioni si trova (Δf)′max = f0V²S/cδ0; quindi, dal massimo valore della variazione temporale dello spostamento di frequenza, si ricava δ0 e di conseguenza anche δ. Tutte le operazioni indicate vanno naturalmente computerizzate.
Le informazioni derivanti dalle osservazioni dirette del tracking, ed eventualmente le altre ottenibili dai sistemi telemetrici, vengono utilizzate per la cosiddetta ‛restituzione orbitale', ossia per la determinazione dell'orbita del satellite e della sua evoluzione temporale e per la previsione delle orbite future. Quest'ultimo adempimento è di importanza fondamentale per satelliti che trasmettano dati al suolo, allo scopo di poter prevedere a che ora e in quale posizione si presenterà il satellite alle stazioni di telemetria.
Notiamo che, in linea di principio, solo sei informazioni indipendenti sulla posizione del satellite sarebbero sufficienti per la determinazione della sua orbita, che dipende appunto, come sappiamo, da sei parametri. In pratica, invece, le informazioni raccolte e trattate sono molte di più, a causa degli inevitabili errori sperimentali; per ottenere il valore delle coordinate e dei parametri orbitali si usano le solite tecniche, tipo quella dei ‛minimi quadrati'. I relativi programmi di calcolo sono oggi estremamente sviluppati e consentono determinazioni accurate (dell'ordine della diecina di metri) della posizione.
Tecniche analoghe si seguono per le estrapolazioni, che vengono condotte sui parametri orbitali, e danno risultati estremamente affidabili. Meno certe sono invece le previsioni relative al rientro di veicoli non guidati o non pilotati, come dimostra l'episodio dello Skylab del dicembre 1979, che preoccupò non poco l'opinione pubblica mondiale.
Questa imprecisione è comunque dovuta soprattutto all'incertezza dei valori della densità atmosferica al momento del rientro e non all'inadeguatezza dei programmi di calcolo.
e) I sistemi dei satelliti artificiali
Il satellite artificiale, per gli scopi cui è destinato, opera mediante un ‛carico pagante', che - nel caso dei voli senza equipaggio umano, di cui ci stiamo qui occupando - dipende dal tipo di missione richiesta. Il carico pagante varia, si può dire, da satellite a satellite, anche della stessa classe; così il carico pagante di un satellite meteorologico è costituito essenzialmente da strumenti ottici, quello di un satellite per telecomunicazioni dagli apparati di ricetrasmissione, ecc. Una descrizione dettagliata ed esauriente di questi apparati non è ovviamente possibile - né interessante - in questa sede. Esistono invece altri sistemi tipici (di controllo d'assetto, o di posizione, di controllo termico, di alimentazione, di energia, di telemetria, ecc.) per cui si ha una sufficiente uniformità. A questi sistemi è dedicata la trattazione che segue.
Controllo d'assetto. - Un satellite artificiale - più in generale un veicolo spaziale - deve, per gli scopi cui è destinato, mantenere un orientamento fisso, o, comunque, programmato, rispetto a un sistema di riferimento assegnato. Tale sistema, inerziale, è di solito un sistema solidale con la Terra, supposta non ruotante, o, più di frequente, è quello ‛intrinseco', costituito dalla verticale locale, dal meridiano locale e dalla direzione normale a entrambi (v. fig. 29). Questa terna non è, in realtà, inerziale, perché si sposta col satellite, ma la velocità angolare del moto relativo è assolutamente trascurabile, in generale, rispetto alle velocità angolari del satellite nel suo moto intorno al baricentro. L'assetto del satellite rispetto a una terna, comunque scelta, è definito dagli angoli di Eulero, per i quali adottiamo la convenzione usata nella fig. 30, dove (X, Y, Z) è la terna inerziale, mentre (x, y, z) è la terna degli assi-corpo, supposta coincidente con la terna principale centrale del satellite (benché ciò non sia strettamente necessario). Il satellite è dotato di una velocità angolare ω, di cui rx, ry, rz sono le tre componenti secondo gli assi-corpo, legate alle derivate dei tre angoli di Eulero dalla relazione vettoriale

La considerazione degli angoli di Fulero e delle velocità angolari è della massima importanza in giromeccanica. Come è noto, se Jx, Jy, Jz sono i tre momenti d'inerzia principali di un corpo rigido cui siano applicate le coppie Cx, Cy, Cz, si ha
Jxêx + (Jz − Jy)ryrz = Cx; (73)
sugli altri due assi valgono relazioni analoghe, ottenute per rotazione degli indici.
Ora, il problema del controllo di assetto si pone perché esistono coppie di disturbo (vento solare, anomalie gravitazionali non previste, deformazioni e spostamenti di masse del satellite, ecc.) che tendono a spostare il satellite dall'assetto desiderato e richiesto. È allora necessario disporre di coppie stabilizzanti, che debbono essere fornite appunto dal sistema di controllo di assetto del satellite e che tendono a smorzare il moto conseguente alla perturbazione.
Lo studio del movimento del satellite intorno al suo baricentro si effettua a partire dalle (72), (73), quando si sia specificata la dipendenza della coppia esterna dai parametri del moto. Bisogna anzi, in generale, distinguere tra coppia di disturbo Cd e coppia stabilizzante Cs, e scrivere quindi
Jxêx + (Jz − Jy)ryrz = Csx = Cdx. (74)
Mentre, ovviamente, la coppia di disturbo può essere di vario tipo, la coppia di controllo dipende in modo noto dai parametri del moto, ossia da rx, ry, rz; χ, η, ψ. Così, note le condizioni iniziali, è possibile ricostruire le leggi del movimento suddetto integrando le sei equazioni (72), (74).
Tuttavia, lo studio della stabilità del satellite si fa, in generale, come per molti altri sistemi materiali, a partire da un moto di riferimento, linearizzando rispetto a tale moto, senza intervento di coppie esterne, ed esaminando il comportamento delle soluzioni delle equazioni del moto quando il tempo tende all'infinito.
Esaminiamo, a titolo di esempio, il comportamento di un satellite stabilizzato a spin intorno all'asse z, supponendo dapprima assente ogni coppia stabilizzante (oltre che, come si è detto, ogni coppia di disturbo). Sia Ω la velocità di rotazione del satellite, di valore assai elevato, per cui si ha rz = Ω + rz′; rx = rx′; ry = ry′ (le quantità con l'apice si intendono piccole del primo ordine). Linearizzando le equazioni del moto (74), si ottiene il sistema

Per giudicare del comportamento asintotico rispetto al tempo, è necessario determinare le radici caratteristiche del sistema lineare (75), ottenibili, come si vede subito, dalla
p2JxJy = (Jz − Jy)(Jx − Jz)Ω2. (76)
Per la stabilità, nessuna delle radici p della (76) deve avere parte reale positiva, altrimenti le soluzioni delle (75) crescono indefinitamente. Pertanto non può aversi né Jz > Jy e Jx > Jz, né Jz 〈 Jy e Jx 〈 Jz; in altre parole, se l'asse di spin è quello per cui il momento d'inerzia è intermedio, il moto è instabile. Per stabilizzarlo, possiamo introdurre delle coppie di reazione

dove le Kx, Ky sono costanti. Introducendo queste espressioni nelle (75), si ottiene ora l'equazione caratteristica
(pJx + Kx)(pJy + Ky) = (Jz − Jy)(Jx − Jz)Ω2 (78)
ed è chiaro che, anche se il secondo membro è positivo, è possibile scegliere le costanti Kx, Ky in modo che le radici della (78) siano ambedue del tipo voluto, cioè abbiano parte reale negativa. Il satellite è così ‛stabilizzato' intorno alla sua posizione instabile.
Al progettista del sistema di controllo spetta la scelta del tipo di sistema che può fomire la coppia richiesta, del tipo (77), o diverso, o più generale. Non si deve credere, però, che basti fissare il valore dei parametri per risolvere il problema, perché ottenere tali valori può costare un forte aggravio di peso, richiedere soluzioni tecniche troppo complicate e compromettere l'affidabilità.
La fig. 31 indica, in forma del tutto generale e generica, lo schema di un sistema di controllo d'assetto. Il veicolo è soggetto a coppie di disturbo e alle coppie di controllo: il risultato, filtrato attraverso la dinamica del satellite, è l'assetto, che viene rilevato dai sensori, misurato e confrontato coi valori desiderati. Da questo confronto nascono le coppie di controllo, che sono prodotte dagli attuatori. Se le coppie di controllo sono generate da appositi dispositivi montati sul satellite stesso (getti di gas, ruote di reazione: v. sotto), si ha il controllo ‛attivo'; se invece le coppie di controllo sono prodotte dall'ambiente esterno (stabilizzazione a spin o per gradiente di gravità), si ha il controllo passivo'. In ogni caso è necessario esaminare le caratteristiche di stabilità e di risposta del satellite.
Per fornire il sistema di riferimento rispetto al quale misurare l'assetto sono necessarie due direzioni non parallele (la terza è normale a entrambe); una direzione, ovviamente, è quella secondo cui è vista la Terra dal satellite. L'altra può essere quella della retta che congiunge il satellite al Sole, ma, per alcuni satelliti, Terra e Sole restano allineati due volte per orbita, mentre le stelle fisse che si trovano molto al di sopra del piano equatoriale terrestre forniscono direzioni di riferimento che non sono mai collineari con la Terra, per orbite medio-basse (v. Kaplan, 1976).
Citiamo due tipi di sensori terrestri. Nel primo, due tracce luminose attraversano periodicamente l'immagine del disco terrestre come esso appare dal satellite e misurano il tempo intercorso tra l'entrata nel campo visivo del disco terrestre e il passaggio su una posizione di riferimento, ossia il tempo necessario per percorrere i segmenti A1B1, A2B2 della fig. 32A. Questi tempi sono uguali in condizioni nominali. Se il satellite effettua una rotazione, per esempio nel piano MN, i due tempi sono diversi (v. fig. 32B) e dalla loro differenza, mediante un opportuno processo di elaborazione dei dati, è possibile risalire allo squilibrio angolare. Considerazioni analoghe valgono, ovviamente, per il piano PQ.
Un altro sistema opera utilizzando il principio dell'equilibrio termico alla radiazione (v. Kaplan, 1976). Gli elementi sensibili indicati nella fig. 33, ad esempio, emettono corrente quando sono colpiti dalla radiazione terrestre: in condizioni di equilibrio, la corrente totale è zero; partendo dal valore che la corrente assume quando, per effetto di uno squilibrio angolare, qualcuno degli elementi sensibili invade il disco terrestre, è possibile determinare i due angoli di rotazione. Tra i sensori solari ci limitiamo a ricordare quelli costituiti da una coppia (o da più coppie) di celle al silicio, ciascuna delle quali, se illuminata dal Sole, produce una corrente: quando l'assetto è quello voluto, le due celle sono illuminate nella stessa misura e le due correnti da esse prodotte, fluendo in opposizione nello stesso conduttore, si annullano a vicenda. In condizioni di assetto deviato, viceversa, si ha una corrente risultante, la cui misura dà l'informazione richiesta sull'angolo di assetto.
I sensori stellari sono generalmente assai complessi e pesanti, a causa della debolezza della luce proveniente dalle stelle; ne esistono perciò pochi tipi.
Tra i sistemi attivi il sistema di controllo mediante getti è uno dei più semplici. Si tratta di produrre un getto di gas, che genera una spinta T; se tale spinta è eccentrica rispetto al baricentro G del satellite, si ha la coppia di controllo. Sono necessari, in linea generale, tre di questi sistemi (uno per ciascuno degli assi da stabilizzare).
Gli attuatori, ossia i generatori di spinta, possono essere di tipo chimico, o di tipo elettrico, a seconda dei valori della spinta e dell'impulso necessari.
Il tipo di controllo on-off è rappresentato nella fig. 34; se il segnale di ingresso dell'attuatore è u, allora l'attuatore stesso fornisce una coppia di controllo di valore τc = C, se u > 0, e di valore τc = − C, se u 〈 0. Consideriamo per semplicità uno solo dei tre assi da stabilizzare, nel caso di piccole deviazioni angolari α; la (74) si scrive, sopprimendo gli indici:
ê = τc/J; α• = r. (79)
Integrando, imponendo le condizioni iniziali do la variabile temporale, si ha

che fornisce la rappresentazione del moto nel piano (α, r), o piano delle fasi. Per ogni punto del piano suddetto passano due parabole: una corrispondente al segno + dell'equazione (80), e l'altra al segno −. La manovra di controllo consiste nel seguire, partendo dal punto iniziale P0, un cammino costituito da archi di parabola fino a raggiungere l'origine, che è il punto finale desiderato. La sequenza degli archi corrisponde evidentemente a successive fasi a spinta positiva o negativa di durata variabile, facilmente calcolabile, corrispondente al tratto d'arco di parabola. Si ha naturalmente un'infinità di soluzioni; tra queste quella di minimo tempo (e ovviamente di minimo consumo), come si può dimostrare analiticamente, corrisponde alla manovra descritta nella fig. 35. La manovra comprende una prima fase a spinta negativa (che porta il punto di funzionamento in P1, intersezione con la parabola per l'origine) e una successiva fase a spinta positiva lungo la parabola P10 (v. Perkins, 1969). Naturalmente tutta la sequenza delle varie fasi, gli istanti di applicazione della spinta, ecc., sono informazioni che vanno inserite nella ‛logica' del controllo, che è un sistema elettronico capace di decidere tutte le operazioni necessarie.
In realtà, un sistema on-off del tipo descritto può risultare estremamente oneroso, in quanto la spinta agirebbe continuamente. È preferibile, invece, un sistema che non funzioni per la maggior parte della missione. La caratteristica è quella indicata nella fig. 36A: l'attuatore non opera quando ∣ u ∣ ≤ δ2 durante le fasi di ‛salita', quando la spinta va attivata, e non opera quando ∣ u ∣ ≤ δ1 durante le fasi di ritorno, quando la spinta va invece disattivata. Si ha δ1 〈 δ2. Il segnale di errore u è dato da −α − Κα•; la costante K (guadagno) è una caratteristica dell'amplificatore di segnale. Nel piano (α, r) le zone in cui la spinta è attiva sono delimitate da rette aventi come coefficiente angolare −K (v. fig. 36B; v. Perkins, 1969). Supponendo di partire dal punto P0 nella zona morta della caratteristica, si ha il tratto P0P1 in cui τc = 0 e quindi r = r0 + α0t; si segue cioè la retta P0P1 fino al punto P1, in cui il controllo comincia ad agire; la traiettoria è ancora una parabola del tipo (80), ossia
dove α1 è il valore che assume α in P1 ed è tale quindi che α1 + Kr0 = δ2. La parabola termina in P2, dove il segnale di errore è uguale al valore minimo δ1; si segue poi la retta orizzontale P2P3, quindi la parabola P2P4, ecc. Il risultato è in generale una curva chiusa che costituisce una soluzione periodica isolata (ciclo limite) e che viene raggiunta (asintoticamente) indipendentemente dalle condizioni iniziali. In altre parole, col sistema di controllo in esame non si giunge ad annullare completamente l'ampiezza di α e r, ma si ha un regime oscillatorio persistente, che si smorza assai lentamente a causa dell'assenza quasi totale di effetti dissipativi. Si preferisce avere una leggera oscillazione di ampiezza controllata e prevista, piuttosto che l'onerosissimo dispendio di propellente richiesto dal sistema di controllo on-off puro. Ovviamente la scelta dell'ampiezza massima è responsabilità diretta del progettista. Ad esempio, il sistema di controllo di assetto del modulo lunare prima della discesa sulla superficie lunare aveva un ciclo limite di circa 2°.
I sistemi a scambio di momento della quantità di moto sono basati sull'idea di trasferire il momento della quantità di moto prodotto dalle forze esterne perturbatrici a un sottosistema del veicolo, la cui velocità angolare rispetto al veicolo stesso non desti alcuna preoccupazione, agevolando così il ritorno del veicolo complessivo alle desiderate condizioni di quota.
Il principio è assai semplice. Si consideri la fig. 37, in cui viene presentato il modello semplificato di un veicolo mobile intorno a un asse fisso rispetto a un sistema di riferimento inerziale, quale si può supporre che sia, come abbiamo già visto, quello esterno al satellite. Al veicolo è fissato lo statore di un motore elettrico, mentre il rotore è solidale con un volano di grande momento d'inerzia j, che ruota con velocità angolare Ω intorno all'asse considerato. Il veicolo è soggetto alla coppia di disturbo τd e alla reazione τm del motore; indicando con ω la sua velocità angolare istantanea, si ha l'equazione
Jω• = τd − τm, (81)
mentre per il volano si ha
j(ω• + Ω•) = τm. (82)
Ovviamente, sommando le due equazioni, si ottiene
(j + J)ω• + j Ω• = τd, (83)
cioè la condizione di equilibrio dinamico per l'intero sistema, che poteva anche dedursi direttamente. Dalla (83) si ricava
ω• = (τd − j Ω•)/(j + J). (84)
Quindi il momento della quantità di moto della ruota agisce nel senso di ridurre - almeno apparentemente - la coppia di disturbo τd. Il momento d'inerzia del rotore, sommandosi a quello del volano a denominatore della (84), determina un'ulteriore riduzione di ω• e, conseguentemente, tende a ridurre lo squilibrio angolare.
Per ottenere le desiderate qualità di stabilità e di risposta è necessario che il motore elettrico, che è il cuore del sistema, sia opportunamente predisposto. Esiste una grande varietà di motori, ma l'ambiente spaziale in cui il sistema si troverà a operare crea non poche difficoltà. La scelta è condizionata da molti fattori (alcuni dei quali pressochè ignorati nelle applicazioni terrestri): per esempio, la facilità di controllo delle velocità, il valore delle coppie in relazione al peso, il consumo energetico. Pertanto i motori sincroni, la cui velocità praticamente non è controllabile, non sono utilizzabili; le macchine a corrente continua, che sono quelle più largamente usate, presentano, a causa delle spazzole e dei contatti, problemi di affidabilità, superabili mediante l'impiego della commutazione elettronica, che però introduce aggravi di peso e di complessità.
È anche necessario ‛modulare' opportunamente la velocità angolare Ω, ossia, praticamente, il momento della quantità di moto sottratto, che appare nella (84). Per questo si regola opportunamente la tensione di armatura, ciò che, a campo d'induzione costante, corrisponde, in un motore a corrente continua, a regolare la velocità Ω. Tuttavia il loop non è tanto semplice, poiché occorre anche tener conto del fatto che la coppia elettromagnetica, che agisce sul motore, dipende a sua volta dalle correnti d'armatura; il sistema è, però, nel suo insieme, controllabile. Naturalmente, considerazioni analoghe valgono per il caso tridimensionale, dove si ha un complicato effetto di interferenza tra le velocità angolari sui tre assi e i corrispondenti sistemi di controllo.
Tra gli altri sistemi di controllo d'assetto, abbiamo già ricordato il sistema di stabilizzazione a spin, che consiste nel mettere il satellite in rapida rotazione intorno a uno degli assi principali centrali d'inerzia. Ciò, naturalmente, può creare difficoltà; tuttavia la ‛rigidezza giroscopica' conferita al corpo dalla rotazione è tale da rendere il sistema teoricamente stabile, se l'asse di rotazione è uno dei due assi cui corrisponde il momento d'inerzia massimo o minimo. Quest'ultima affermazione va, però, modificata se si considera un corpo reale, ossia un corpo non completamente rigido, ma dotato di una certa elasticità, per cui qualsiasi suo movimento è accompagnato da moto relativo tra gli elementi con conseguente inevitabile dissipazione; oppure se si deve tener conto del moto di eventuali masse fluide a bordo (fenomeni di sloshing); o, infine, se si hanno smorzamenti prodotti intenzionalmente, appunto per motivi di stabilità. In tutti questi casi la stabilità è assicurata solo se la rotazione avviene intorno all'asse di massimo momento d'inerzia. Questa è la situazione che si ha, per esempio, in casi come quello illustrato nella fig. 38, in cui un satellite stabilizzato a rotazione intorno all'asse di minimo momento di inerzia, con appendici esterne flessibili, a causa del moto di flessione di queste ultime e della conseguente dissipazione nei punti di attacco, tende a disporsi secondo la configurazione di massimo momento d'inerzia, dopo un tempo più o meno lungo di ‛tombolamento' (tumbling). Un satellite rotante, o ‛spinnato', ha, tra gli altri difetti, anche quello di essere meno efficiente dal punto di vista dell'energia captabile per mezzo di pannelli solari; una semplice considerazione geometrica basata sulla legge di Lambert mostra infatti che l'energia stessa viene ridotta del fattore 1/π, rispetto a quella disponibile. Per questo motivo, la superficie dei satelliti spinnati è completamente ricoperta da pannelli solari.
Un'evoluzione nel campo dei satelliti spinnati si è avuta con la formula dual-spinners, abitualmente usata nei satelliti per telecomunicazioni fino all'Intelsat IVA. In tal caso il satellite è composto di due parti, una delle quali (piattaforma) viene ‛despinnata', cioè fatta controruotare fino a fermarsi e successivamente stabilizzata rispetto alla Terra, mentre l'altra è mantenuta in elevata rotazione. Per motivi di ingombro, è necessario far ruotare il corpo intorno all'asse di momento di inerzia minimo, il che può avvenire - come hanno dimostrato esperienza e teoria - se si aggiunge alla piattaforma un elemento dissipatore che riesce a vincere gli effetti destabilizzanti della dissipazione rotorica. Questo tipo di stabilizzazione (‛girostato') è stato applicato anche in Italia al satellite SIRIO I; il SI RIO II, attualmente in fase di progetto, è basato su un sistema a triplo spin: piattaforma, rotore e pannelli.
Ricordiamo ancora il sistema di stabilizzazione a gradiente di gravità e il sistema a coppia magnetica. In quest'ultimo viene creato un dipolo mediante due conduttori percorsi da corrente orientati in senso normale al campo magnetico terrestre; qualunque movimento angolare secondo gli assi di rollio o di imbardata provoca un momento di reazione; per il terzo angolo di rotazione è necessario un altro sistema, per esempio una ruota di reazione.
Accenniamo ora brevemente agli altri sistemi dei satelliti artificiali.
Il sistema di controllo termico è di importanza fondamentale per ogni tipo di satellite; per la sua messa a punto è necessario uno studio accurato delle orbite e del periodo di non insolazione, che dipende fortemente dall'altezza dell'orbita (v. fig. 39): per esempio, nel caso dei satelliti geostazionari, tale periodo si riduce a una piccola frazione del tempo orbitale (v. fig. 40).
La determinazione della temperatura nei vari punti del satellite viene fatta sulla base della radiazione mutua tra diversi punti materiali. È necessario che il calore prodotto dalla strumentazione di bordo e quello che il satellite riceve dal Sole vengano trasmessi all'esterno; ciò si ottiene mediante complicati sistemi di scambio di calore e giocando sul rapporto tra l'assorbività a e l'emissività e della superficie, che varia fortemente con la lunghezza d'onda della radiazione e che viene controllato mediante speciali vernici.
Il sistema di alimentazione dell'energia è basato di solito sull'impiego delle celle solari, la cui tecnologia, anche in vista delle applicazioni terrestri, è in continua evoluzione. Le ‛padelle solari' sono ricoperte di celle al silicio o all'arseniuro di gallio e funzionano in base al principio della conversione fotovoltaica di energia. Esse possono comportare gravi problemi dal punto di vista della dinamica strutturale e della stabilità, a causa della loro forte massa e flessibilità. Va anche curata in modo particolare l'adesione delle celle al supporto, tenuto conto che un satellite, per essere economicamente vantaggioso, deve oggi raggiungere tempi di vita dell'ordine di decine d'anni. L'eccesso di potenza eventualmente prodotto deve essere immagazzinato in batterie speciali a bordo del veicolo.
Per i satelliti che trasmettono segnali, bisogna predisporre appositi sistemi telemetrici. I segnali vengono modulati, trasmessi e demodulati al suolo. Esistono svariati sistemi di telemetria, la cui tecnica è andata evolvendosi gradualmente: dai sistemi analogici usati nei primi satelliti si è passati a quelli digitali in uso oggi correntemente perché meno soggetti a errori, anche se più soggetti a perdite di segnale. Oltre ai dati specifici della missione, è necessario che il satellite invii a Terra dati ambientali, riguardanti cioè temperatura, tensione degli apparati elettrici, livello dei liquidi, ecc. Un interessante problema è costituito dalla cosiddetta ‛compressione dei dati', che si deve effettuare allo scopo di ridurre le dimensioni, il peso, l'ingombro degli eventuali apparati di registrazione. Certi satelliti, poi, in conseguenza della loro orbita, possono trasmettere dati a Terra solo quando si trovano in una zona più o meno limitata; perciò entro pochi minuti devono trasmettere molti dati. Per questo è, tra l'altro, fondamentale l'accertamento della posizione relativa della stazione di telemetria rispetto al satellite, il che dimostra quanto sia importante la previsione delle ‛effemeridi' del satellite.
Notiamo, infine, che per i satelliti geostazionari è necessario un sistema di controllo della posizione, che deve compensare l'inevitabile slittamento dovuto alle perturbazioni secolari. La correzione viene fatta a intervalli regolari mediante getti gassosi e il consumo di propellente è molto superiore a quello richiesto dal controllo d'assetto.
f) Strutture e materiali
A causa del grande numero di tipi di satelliti artificiali, non esiste una struttura caratteristica, ma ogni realizzazione fa storia a sé. Requisiti comuni alle strutture spaziali sono però: a) leggerezza, b) robustezza, c) rigidezza, d) affidabilità. Mentre il primo requisito è ovvio, va sottolineata la differenza tra le qualità b) e c): la prima indica che il satellite deve essere capace di assorbire le sollecitazioni cui è sottoposto; la seconda, che non deve deformarsi troppo. È bene notare che le due definizioni non sono affatto identiche: per esempio, un satellite molto lungo può benissimo resistere allo sforzo, ma deformarsi eccessivamente. L'affidabilità (cattiva traduzione italiana del termine inglese reliability), consistente nella probabilità di funzionamento del veicolo spaziale, dovrebbe scartare dal valore unitario di una quantità pari a 10-6 o 10-7. Essa, peraltro, è tanto minore quanto più complesso è il sistema.
Assai importanti, per le strutture dei satelliti, sono le qualità dinamiche e quelle termiche. Per le prime, occorre sincerarsi della ‛risposta' strutturale alle sollecitazioni esterne, in particolare a quelle che si hanno al lancio, al distacco degli stadi, alla messa in orbita finale del carico utile. È necessario evitare risonanze; per questo motivo hanno importanza fondamentale le prove dinamiche, che consistono nel porre in vibrazione il modello strutturale facendo variare la frequenza di eccitazione secondo leggi temporali che sono prescritte da norme ben precise e/o secondo particolari forme di sollecitazione (per esempio, di tipo casuale). Questa qualificazione dinamica va poi ripetuta sul modello integrato vettore-satellite e vi è oggi la tendenza a farla precedere da analisi dinamica condotta al calcolatore per mezzo di grossi programmi, basati di solito sulla tecnica degli elementi finiti; programmi che hanno avuto, e stanno avendo, una sempre più straordinaria diffusione. Le prove dinamiche (o le valutazioni analitiche associate) hanno anche lo scopo di determinare la forma tipica della vibrazione strutturale o ‛modo'; da esso dipende, infatti, l'effetto, spesso assai cospicuo, che la flessibilità strutturale ha sulla dinamica generale del veicolo spaziale, tramite le forze d'inerzia ad esso associate.
Le qualità termiche delle strutture spaziali sono collegate anzitutto alla necessità che il carico utile non raggiunga temperature troppo elevate; per certe strutture, poi, come, per esempio, le antenne paraboliche dei satelliti per telecomunicazioni, è necessario evitare le forti deformazioni di carattere termico, che provocherebbero riflessioni irregolari dell'onda elettromagnetica da trasmettere, con conseguente perdita del segnale. La variazione di insolazione durante l'orbita rende questo problema ancora più complicato.
Le qualità illustrate dipendono, oltre che dal tipo strutturale, anche dai materiali impiegati, ovvero dalle loro costanti fisiche. Tali materiali sono generalmente in lega leggera (salvo alcune parti in titanio), ma stanno sempre più affermandosi i materiali compositi, costituiti da una matrice (plastica, ma talvolta anche di polvere metallica sinterizzata) in cui sono contenuti filamenti (generalmente di carbonio, ma talvolta anche di boro) ottenuti mediante speciali processi di lavorazione, che presentano resistenze e rigidezze paragonabili a quelle delle migliori leghe metalliche.
Questi materiali sono generalmente e intrinsecamente anisotropi; sovrapponendone opportunamente un certo numero e sfalsando le direzioni dei filamenti, si può giungere a speciali qualità del materiale. Per esempio, ricordando i problemi termici delle antenne sopra accennati, è possibile ottenere coefficienti di dilatazione termica nulli.
Un problema tipico dei materiali aerospaziali è il ‛degasaggio', ossia la tendenza del materiale, in ambiente a vuoto pressoché assoluto, a perdere eventuali inclusioni gassose in esso contenute; questo fenomeno, come è stato provato, modifica assai profondamente le qualità di certi materiali, e va, se non evitato, almeno controllato. Infine, per i materiali che si trovano a bordo di satelliti destinati a durare molti anni in orbita, è necessario procedere a prove acceleranti, ossia che simulino le condizioni di funzionamento su un arco di tempo assai più breve (qualche mese); le prove sono condotte in appositi simulatori spaziali, enormi e costose apparecchiature in cui le varie condizioni ambientali (in particolare, irraggiamento solare e vuoto) sono riprodotte con precisione assai spinta.
g) Applicazioni dei satelliti artificiali
Le applicazioni dei satelliti artificiali sono molteplici; in questa sede la ristrettezza dello spazio non consente di fare che un fugace cenno alle più importanti; tralasceremo le applicazioni nel campo della navigazione, i satelliti di osservazione e quelli militari. Su queste ultime applicazioni, almeno su quelle non coperte da segreto militare o di altra natura, il lettore potrà trovare informazioni dettagliate nei testi specializzati.
Satelliti per il rilevamento di risorse terrestri. - Una delle applicazioni più utili, dal punto di vista sociale, economico e politico, della tecnica orbitale è il cosiddetto remote sensing, ossia il rilevamento a distanza di un oggetto, effettuato a partire dalle sue caratteristiche esterne. Il nostro stesso modo di vedere è un esempio di remote sensing, nel senso che, dalle informazioni trasportate dalla luce che il nostro occhio riesce a percepire, associate ad altre informazioni precalcolate, riusciamo a capire, per esempio, che quello che vediamo è un libro, una matita, una donna, un albero. I satelliti per il rilevamento di risorse terrestri si fondano sul presupposto che tuttigli oggetti, viventi e no, hanno una propria ‛firma', collegata alle radiazioni, visibili e/o invisibili che essi trasmettono o riflettono. Nelle applicazioni spaziali, tenuto conto delle distanze del satellite dalla superficie terrestre e del potere risolutivo degli apparati che la tecnologia attuale riesce a produrre, il telerilevamento non può essere che limitato a grandi aggregati (foreste, distese d'acqua, ecc.), sebbene non sia da escludere che apparati più sofisticati, con potere risolutivo più elevato (fino a qualche metro), possano individuare oggetti assai più piccoli, come carri armati o velivoli al suolo.
Se si conosce e si sa individuare la ‛firma' di un tipo di piantagione o di vegetazione, è chiaro che, disponendo di una serie di rilevamenti che abbraccino una certa regione o addirittura tutta la superficie terrestre, è possibile effettuare il censimento delle aree boschive relative a quel certo tipo di vegetazione; successivamente, dalla densità stimata di unità vegetali per unità di area, è possibile effettuare una stima del numero totale di individui di quel certo tipo di vegetazione presenti in tutta la regione in esame.
Un esempio classico di satellite per il rilevamento di risorse terrestri è costituito dal Landsat; prima di descriverlo esaminiamo brevemente il principio su cui si basa. L'energia riflessa dagli oggetti è captata da un elemento sensibile in quattro diverse bande di lunghezza d'onda e convertita in segnali elettrici; di queste bande le ultime due sono al di fuori dello spettro visibile. I segnali elettrici, opportunamente manipolati, vengono trasmessi a Terra: i segnali delle bande uno e due sono riprodotti in bianco e nero allo scopo di avere una chiara idea di quello che il satellite ha ‛visto', mentre i segnali delle bande tre e quattro vengono proiettati attraverso filtri blu, rossi e verdi, ottenendo le cosiddette immagini ‛a falso colore'. Senza entrare in dettagli che richiederebbero uno spazio espositivo assai maggiore, ricordiamo che dal confronto delle suddette immagini a falso colore è possibile riconoscere la firma dell'oggetto. Così, per esempio, una vasta distesa d'acqua, che assorbe quasi totalmente l'energia di radiazione che la investe, appare nera nelle bande tre e quattro; l'acqua inquinata appare azzurra, con un tono di azzurro che dipende ovviamente dal tasso di inquinamento. La vegetazione e le piante appaiono di color rosso vivo, con una tonalità che dipende dalle dimensioni delle foglie e che quindi è di grande aiuto per riconoscere il tipo di vegetazione. La lucentezza delle immagini dipende anche dallo ‛stato di salute' della vegetazione, per cui, effettuando più passaggi successivi sulla stessa zona, è possibile rendersi conto dell'andamento temporale delle colture.
Ma le applicazioni del telerilevamento orbitale vanno ancora più in là e permettono la scoperta di difetti geologici, di aree sconosciute, di rocce acquifere - molto importanti nei problemi di irrigazione -, la correzione di dati geografici in zone scarsamente esplorate, ecc.
Il Landsat 1 è stato il capostipite dei satelliti per telerilevamento; lanciato nel 1972 su un'orbita quasi polare di 901 × 920 km, aveva un periodo orbitale che gli consentiva di effettuare 14 rivoluzioni complete al giorno intorno alla Terra e quindi di ‛vedere' ogni punto del pianeta salvo una piccola zona intorno ai poli (l'inclinazione del piano orbitale era di 99°). L'orbita era stata studiata in modo che risultasse ‛eliosincrona', ossia tale che ogni 18 giorni (cioè ogni 18 × 14 = 252 orbite) il satellite si ritrovasse nello stesso punto. Le fotografie scattate dal satellite coprivano un'area di 185 × 185 km2 a ogni passaggio; il Landsat scattava circa 9.000 fotografie alla settimana, che furono sin dal principio messe a disposizione di tutti i richiedenti, a prezzo molto basso.
Uno schema assai semplificato del Landsat 1 (originariamente denominato ERTS = Earth Resources Technology Satellite) è riportato nella fig. 41, dove sono mostrati la forma a farfalla e i sensori, i cui dettagli sarebbe troppo lungo discutere. Va inoltre ricordato che il satellite, vista la grande quantità di dati che raccoglieva e dal momento che, a causa della sua orbita polare, per molto tempo non sorvovolava le stazioni terrestri, doveva ‛comprimere' i dati (eliminando i segnali superflui), registrarli e poi trasmetterli insieme.
Il Landsat 1 fu ritirato dalla NASA il 16 gennaio 1978, dopo cinque anni e mezzo di attività. Nel frattempo, nel 1975, era stato lanciato il Landsat 2, su un'orbita identica a quella del Landsat 1, ma con uno sfasamento di 180°, grazie al quale, durante i due anni e mezzo di vita contemporanea dei due satelliti, l'intervallo tra due successive immagini della stessa zona fu di nove giorni anziché diciotto. Il Landsat 2 fu ritirato dal servizio nel 1980, a causa di un guasto al sistema di controllo di volo. Il terzo membro della famiglia, il Landsat 3, lanciato nel 1980, è dotato di una strumentazione assai più raffinata, che permette risoluzioni ottiche fino a circa 40 m e un migliore apprezzamento delle variazioni di temperatura (telerilevamento termico) anche tra giorno e notte (v. Turnill, Spaceflight..., 1978).
Satelliti per telecomunicazioni. Un satellite per telecomunicazioni permette di ottenere un collegamento tra due punti A e B della superficie terrestre, anche nel caso che sia difficile effettuare un collegamento diretto tra di essi, a causa di ostacoli interposti. Si noti che B può anche essere vicinissimo ad A (posizione B1 indicata nella fig. 42). I vantaggi delle telecomunicazioni via satellite sono evidenti: disponendo di un numero sufficiente di satelliti, si può ottenere la copertura completa della superficie terrestre e avere quindi un collegamento tra due punti qualunque della Terra.
Un sistema per telecomunicazioni comprende, in linea di massima, una rete fissa, che collega punti fissi della Terra, una rete mobile, destinata a collegare nello stesso modo stazioni fisse a Terra e navi o aerei o veicoli spaziali, una rete di telediffusione e/o di radiodiffusione, a carattere regionale o internazionale o mondiale. Uno schema generale di satellite per telecomunicazioni è rappresentato nella fig. 43; la fig. 44 mostra invece il satellite Intelsat IV A, uno dei più recenti di questa categoria.
I satelliti per telecomunicazioni sono caratterizzati da una grande precisione di puntamento, che va realizzata mediante opportuni elementi del controllo di assetto; oggi vengono richieste, e assicurate, precisioni dell'ordine di grandezza del decimo di grado. Le antenne, indicate con A1 e A2 nella fig. 43, debbono anch'esse soddisfare requisiti di grande precisione; ciò ha condotto alla produzione di materiali ad altissima stabilità, come i compositi a fibre di carbonio e di boro, ottenuti sovrapponendo fogli di materiale, dotati ciascuno di un'elevata anisotropia termica e disposti in modo tale che il coefficiente complessivo di dilatazione termica risulti praticamente nullo. Si riesce così a compensare gli effetti dell'irraggiamento solare e a ridurre al minimo le dilatazioni termiche, responsabili appunto delle distorsioni superficiali e della corrispondente perdita di trasmissione. Considerazioni analoghe, sebbene meno stringenti, si possono fare per le antenne di telemetria, destinate a inviare a Terra i dati relativi alle condizioni ambientali a bordo del satellite (temperatura dei vari elementi, tensione delle batterie, ecc.). La superficie esterna è ricoperta interamente da pannelli solari, a causa della stabilizzazione a spin adottata per questo tipo di satelliti (v. È e).
Il sistema di telecomunicazioni dell'emisfero occidentale è attualmente assicurato dal Consorzio Intelsat (International Telecommunications Satellite), cui aderiscono più di cento nazioni. L'Intelsat fu fondato nel 1964 da 14 nazioni e il primo satellite - l'Intelsat I, Early Bird -, lanciato nel 1965, aveva un peso complessivo di 68 kg al decollo e di 38,5 kg dopo l'ignizione del motore di apogeo e una capacità totale di 240 circuiti telefonici, ovvero di un canale televisivo. Lo sviluppo del sistema è stato impressionante; sono state lanciate in successione diverse serie di satelliti: l'Intelsat II (1966-1967), l'Intelsat 111(1968-1970), l'Intelsat IV (1972-1975), l'Intelsat IV A (1976-1980), l'Intelsat V (1981). La serie Intelsat V comprenderà sette satelliti, di cui gli ultimi tre dovrebbero essere posti in orbita dallo Shuttle. La capacità dell'Intelsat V è di circa 12.000 circuiti telefonici più 4 canali televisivi, che sono ancora insufficienti, dato il ritmo frenetico con cui aumenta la richiesta dei servizi di telecomunicazioni.
Il sistema Intelsat è basato sull'impiego di satelliti geostazionari; di solito ve ne sono quattro in funzione contemporaneamente: due sull'Atlantico, uno sul Pacifico e uno sull'oceano Indiano. In alcuni casi può essere necessario (è già avvenuto nel passato) spostare uno dei satelliti del sistema; in generale, oltre al controllo d'assetto, è richiesto un sistema di controllo della posizione (station-keeping), data la tendenza del satellite a muoversi sotto l'effetto delle cause perturbatrici.
La tecnica di lancio è descritta nella fig. 45 (v. Turnill, Spaceflight..., 1978). Il satellite, insieme allo stadio finale Centaur del missile di lancio, viene portato su un'orbita di parcheggio di 185 × 644 km; successivamente, l'accensione del Centaur (che poi si separa) permette di raggiungere la quota di 35.680 km. Il motore di apogeo fornisce le condizioni per l'orbita finale geosincrona, che viene aggiustata e corretta entro un periodo non inferiore ai due mesi.
Per le necessarie manovre di correzione dell'orbita, di controllo di posizione e di assetto vengono impiegati piccoli razzi a idrazina. Nel caso dell'Intelsat IV (stabilizzato a spin, mentre l'Intelsat V è a tre assi), il peso dell'idrazina è notevole, circa 136 kg, e si tratta di peso ‛sottratto' al carico utile. Tuttavia, una volta esaurita l'idrazina, la vita operativa del satellite cessa, anche se la vita orbitale può continuare per centinaia di anni. Queste considerazioni sono necessarie per comprendere la grande importanza del sistema di controllo e della dinamica generale del satellite, su cui anche il movimento del fluido (idrazina) in condizioni di microgravità e la flessibilità strutturale influiscono sensibilmente.
Il sistema sovietico Molniya (Aurora) è basato su un principio diverso: i satelliti si muovono su un'orbita avente un'inclinazione di 65°, perigeo a 500 km nell'emisfero meridionale e apogeo a 40.000 km nell'emisfero settentrionale. Con questa orbita, il satellite resta visibile nelle zone polari per circa 2/3 della sua orbita (che non è geostazionaria, ovviamente). Con un certo numero di satelliti opportunamente distanziati è possibile effettuare trasmissioni pressoché ininterrotte su zone sperdute, dove i collegamenti via terra risulterebbero oltremodo scomodi e costosi. Il sistema Molniya fornisce anche il collegamento tra il Cremlino e la Casa Bianca.
Recentemente l'Unione Sovietica ha costituito anche un sistema di telecomunicazioni su orbita geostazionaria (Statsyonar) composto di sette satelliti dislocati sugli oceani Atlantico, Pacifico e Indiano. Questa iniziativa ha vivamente preoccupato l'Intelsat, soprattutto a causa delle interferenze provocate dalle frequenze di trasmissione, assai vicine, appunto, a quelle dell'Intelsat e di altri sistemi di satelliti.
Nel campo dei satelliti per telecomunicazioni non va dimenticato l'italiano Sirio, lanciato nel 1977 da Cape Canaveral, destinato a effettuare misure sulla propagazione delle onde a frequenze di 11-18 GHz e soprattutto sull'attenuazione e sulla dispersione prodotte dalle condizioni atmosferiche di pioggia, neve, grandine. Il satellite Sirio è stato spesso usato come vero e proprio trasmettitore.
Satelliti scientifici. - I satelliti di questa classe sono molto eterogenei, in quanto gli esperimenti effettuati sono i più svariati e quindi anche gli strumenti di misura, che costituiscono il payload e condizionano la struttura e le prestazioni del satellite, sono assai diversificati.
Una serie gloriosa e storicamente importante di satelliti artificiali è quella degli Explorer, cui si è già accennato nel cap. 2. I satelliti della serie Explorer furono via via modificati, per essere adattati a una vasta gamma di esperimenti scientifici. Alcuni di essi, chiamati Interplanetary Monitoring Platforms (IMP), furono utilizzati per lo studio dello spazio compreso tra la Terra e la Luna e degli effetti del vento solare. Si è trattato, in ogni caso, di satelliti dal peso assai modesto, destinati a missioni talvolta interplanetarie, talvolta su orbita lunare. Un disegno schematico di satellite Explorer è fornito nella fig. 46. Tra gli ultimi lanciati vi è il satellite ISEE 3 (12 agosto 1978), destinato a misurare la concentrazione isotropica dei raggi cosmici di provenienza solare e galattica e altri fenomeni astrofisici e magnetici scoperti recentemente. Di speciale interesse era la posizione iniziale di questo satellite nello spazio, quasi coincidente con uno dei cosiddetti ‛punti di librazione', cioè uno dei punti in cui l'attrazione combinata Luna-Sole-Terra è complessivamente nulla; in tale posizione il satellite si muoveva intorno al Sole esattamente alla velocità angolare della Terra, alla distanza di 1.500.000 km dalla Terra stessa. Tuttavia, difficoltà inerenti alle comunicazioni hanno indotto a modificare l'orbita dell'ISEE 3, trasformandola in un'orbita circolare di circa 145.000 km intorno al punto di librazione.
Come è facile immaginare, una delle scienze che maggiormente hanno tratto vantaggio dalla ricerca spaziale su base orbitale è l'astronomia (v. stelle: Astronomia a raggi X). In orbita, infatti, sono assenti tutti i fenomeni di attenuazione, di assorbimento, di dispersione che si hanno nell'atmosfera e che condizionano grandemente l'osservazione ottica degli oggetti celesti. Il programma statunitense OAO (Orbiting Astronomical Observatory), iniziato nel 1959 e terminato nel 1972, era basato su quattro lanci (di cui peraltro solo due riusciti). I risultati scientifici ottenuti, di prim'ordine, riguardarono l'emissione ultravioletta del pianeta Urano, lo studio delle stelle giovani, che emettono la maggior parte della loro energia nell'ultravioletto, ecc. Particolarmente interessante l'OAO 3, ultimo della serie (orbita di 748 × 740 km, inclinazione di 35°, peso di 2.220 kg), su cui fu montato un telescopio a raggi ultravioletti da 2 cm (Copernicus), di estrema precisione di puntamento, che effettuò uno studio di tre stelle simili al nostro Sole, anche per esaminare la possibilità di comunicazione con altri esseri intelligenti di altri sistemi planetari. Infine, altra applicazione importante dell'OAO 3 è quella illustrata nella fig. 47: osservando una stella dalla posizione A e la stessa stella dalla posizione B, e paragonando i risultati, si possono avere informazioni importanti sui fenomeni di inquinamento atmosferico terrestre, in particolare sul deterioramento dello strato ozonico terrestre, derivante dal cloro contenuto nel freon, il gas usato nelle confezioni spray (v. Turnill, Spaceflight..., 1978).
Tra i satelliti per osservazioni astronomiche vanno ricordati i due Explorer 42-48 (SAS: Small Astronomy Satellites), dai cui risultati è stato possibile ricavare una vera e propria mappa dei raggi gamma, non visibili da Terra, nonché alcune informazioni fondamentali sui cosiddetti ‛buchi neri'. Entrambi i satelliti furono lanciati dal poligono equatoriale italiano S. Marco, che dimostrò in tutt'e due le occasioni la grande validità della sua concezione.
Grandi speranze sono fondate sul progetto Space Telescope, la cui realizzazione è prevista per il 1983-1984; il programma contempla la messa in orbita di un telescopio a riflessione del diametro di 2,4 m, che dovrebbe consentire l'osservazione di corpi 50 volte meno brillanti e 7 volte più lontani di quelli osservabili da Terra; si potrebbe quindi finalmente arrivare all'osservazione di uno o più pianeti delle stelle più vicine. In altre parole potrebbe essere accertata l'esistenza di sistemi solari simili al nostro, che finora possono essere soltanto ipotizzati su base statistica. Altri risultati potrebbero riguardare la curvatura dell'universo, con riflessi fondamentali sulle ricerche cosmogoniche.
La serie dei satelliti lanciati per scopi scientifici è lunghissima. Non va dimenticato che, a prescindere dalla strumentazione specifica di misura di grandezze particolari, lo stesso studio delle orbite dei satelliti e delle loro perturbazioni ha fornito e fornirà informazioni su alcuni parametri geofisici, come, per esempio, le armoniche superiori del campo gravitazionale terrestre, di cui si conoscono i valori per circa 30-40 termini.
Tra i satelliti destinati a ricerche sulla fisica del Sole, va ricordato l'Helios 1, frutto di una collaborazione tra gli Stati Uniti e la Repubblica Federale Tedesca; lanciato su orbita eliocentrica, il 15 marzo 1975 arrivò alla minima distanza dal Sole mai raggiunta (48.000.000 km). Le misurazioni dell'Helios 1 riguardavano la temperatura superficiale del Sole e il vento solare; tra gli altri risultati, degno di nota è l'accertamento di un grande numero di meteoriti (circa dieci volte di più che in vicinanza della Terra), caratterizzate da una quasi perfetta isotropia direzionale. Particolarmente sofisticato ovviamente il sistema di controllo termico, che consente di mantenere all'interno del satellite la temperatura di 30 °C, contro i 370° esterni. Ulteriori risultati sono stati ottenuti dall'Helios 2, destinato a raggiungere i 44.000.000 km di distanza dal Sole, con conseguente aumento del 10% del calore ricevuto.
Nel 1980 è stato lanciato il satellite SMM (Solar Maximum Mission), il cui carico utile è costituito da strumenti specifici per lo studio dei brillamenti solari; se ne attendono i risultati sotto forma di dati relativi a radiazioni elettromagnetiche con lunghezze d'onda comprese in una vasta gamma: raggi ultravioletti, raggi X e raggi γ. Il satellite, stabilizzato a tre assi, è caratterizzato da una elevatissima precisione di puntamento.
Satelliti meteorologici. - L'osservazione meteorologica coi satelliti è stata una delle prime applicazioni della tecnica orbitale. Infatti, le osservazioni effettuabili dall'esterno dell'atmosfera consentono previsioni accurate anche su un arco di tempo abbastanza lungo (qualche giorno).
I satelliti meteorologici operano nell'ambito di un sistema che comprende satelliti geostazionari e satelliti su orbita bassa. I primi forniscono ogni mezz'ora delle immagini del disco terrestre in diverse lunghezze d'onda, in particolare nello spettro visibile e nell'infrarosso termico. Invece i satelliti su orbita bassa perlustrano tutta la superficie terrestre, comprese naturalmente le zone non illuminate dal Sole, e forniscono un quadro completo della dinamica atmosferica istantanea. Mediante l'uso di modelli matematici assai sofisticati, queste informazioni vengono opportunamente elaborate per dedurne le previsioni meteorologiche.
Un altro dato utilizzato - anche se indirettamente - è il flusso di calore negli strati atmosferici, che è la somma di quello solare reirradiato dalla Terra e di quello proprio della Terra; dalle variazioni locale e temporale di questo flusso è possibile conoscere alcune caratteristiche dell'atmosfera, quali la composizione o la nuvolosità.
Negli Stati Uniti il programma di osservazione meteorologica s'iniziò nel 1960 col satellite Tiros (Television and InfraRed Observation Satellite), del peso di circa 120 kg, sulla cui superficie erano montate due telecamere a 180°. Il Tiros scattava una fotografia ogni 128 secondi, con possibilità di riduzione a una ogni 32 secondi; fu questo uno dei primi casi in cui i dati, registrati su nastro, erano compressi e ritrasmessi in vicinanza della stazione di telemetria: la prima applicazione della tecnica di compressione dei dati. L'orbita del Tiros I era di 692 × 740 km. Il programma continuò con altri satelliti Tiros, fino al Tiros 10, lanciato nel 1965, che cessò di funzionare nel 1967. Il successivo programma meteorologico USA, chiamato Tos, fu portato avanti negli anni 1966-1969 per mezzo dei satelliti della serie ESSA, da 1 a 9, che sostanzialmente erano versioni perfezionate dei Tiros. Tra l'altro, gli ESSA dettero un importante contributo anche a una migliore conoscenza di zone innevate degli Stati Uniti, dimostrando così le capacità del satellite come strumento per la previsione di inondazioni e di altre calamità naturali. Un deciso miglioramento si ebbe con la nuova serie di satelliti ITAS/NOAA (1970-1976), capaci di prendere fotografie anche di notte e di fornire così informazioni di valore inestimabile agli effetti delle previsioni. Le orbite dei NOAA erano quasi circolari a 1.400 km di quota.
Nel 1974 fu fatto un altro grande passo avanti con l'invio in orbita geostazionaria dell'SMS 1 , che, come si è detto, poteva effettuare riprese ogni trenta minuti nel visibile e nell'infrarosso. Il primo di una nuova generazione di satelliti meteorologici, il Tiros N (che riprende quindi la vecchia denominazione), è stato lanciato nell'ottobre 1978. Esso è dotato di una strumentazione straordinariamente avanzata, sofisticata e multipla: radiometri ad alta risoluzione, un registratore di attività solare e un perlustratore in verticale. Si ritiene che il Tiros N, nelle sue versioni più avanzate, permetterà di effettuare previsioni fino a due settimane di anticipo.
Sono previsti altri lanci in orbita polare sincrona a 883 km di quota, fino al 1985; il peso in orbita di questi satelliti sarà di 689 kg. Nel campo dei satelliti meteorologici non si possono dimenticare quelli delle serie Nimbus, che sono in realtà nati proprio per motivi meteo, ma che successivamente, con l'aggiunta di strumenti sempre più sofisticati, sono stati trasformati in sistemi per lo studio delle scienze terrestri, come l'oceanografia e lo studio del movimento dei ghiacciai. I Nimbus sono stati, tra l'altro, i predecessori delle serie Landsat.
Il sistema spaziale meteorologico dell'Unione Sovietica è basato sul programma Meteor, derivato dai prototipi Cosmos. Il sistema è costituito da tre satelliti a distanza successiva di 90° e 180°, che passano sopra una certa area della Terra nell'emisfero settentrionale a intervalli di 6 e 12 ore, e analogamente nell'emisfero sud. Anche i satelliti Meteor sono in grado di effettuare fotografie notturne. Radiometri e altri strumenti misurano la radiazione terrestre (che, come si è detto, dà una misura della frazione di globo terrestre coperta da nubi). Non si conoscono molti dettagli tecnici (nemmeno il peso); si conosce l'orbita, quasi polare (81°), di 644 × 713 km. Il programma continua con 3-4 lanci l'anno; attualmente si hanno i Meteor 2 e i Meteor 2-02, che costituiscono versioni avanzate, dotate di strumentazioni sempre più raffinate e precise. Anche l'Europa, attraverso la sua agenzia spaziale, l'ESA, ha contribuito al programma spaziale meteo, con il Meteosat, il cui primo esemplare ha funzionato dal novembre 1977 al novembre 1979; il secondo esemplare è stato lanciato con il terzo Ariane. Il satellite è geosincrono e ha un peso di circa 700 kg. Il Meteosat fa parte di una serie di 5 satelliti geostazionari; gli altri quattro saranno forniti da Stati Uniti (2), URSS e Giappone.
Le grandi stazioni spaziali. - L'argomento che viene qui di seguito trattato riguarda più la tecnologia del futuro che quella del presente (v. Glaser, 1968 e 1980).
Il perfezionamento tecnico e la domanda sempre crescente nel settore delle attività spaziali comportano la necessità di realizzare sistemi di dimensioni sempre maggiori. Questa tendenza, che è d'altronde comune a tutte le tecniche di avanguardia, è destinata ad assumere caratteri sempre più marcati con l'avvento dei vettori recuperabili, come lo Shuttle, il quale consentirà una drastica riduzione del costo di messa in orbita di materiale. Esempio classico è rappresentato dai satelliti per telecomunicazioni: dalle antenne di due metri dell'Intelsat IV, si è passati a quelle di quasi sei metri dell'Intelsat V e sono già in progetto antenne dell'ordine delle decine e delle centinaia di metri, che potrebbero rendere effettivamente economico ogni tipo di trasmissione, telefonica e televisiva, di enormi quantità di informazione.
Un altro possibile campo di applicazione su cui da anni si discute e si approntano progetti è quello delle stazioni orbitanti per la raccolta dell'energia solare (SPS: Solar Power Satellites). Questo tipo di applicazione, ideato da P. Glaser nel 1969, in un'epoca, cioè, in cui il problema dell'energia non aveva ancora assunto le drammatiche proporzioni che avrebbe assunto negli anni settanta-ottanta, rappresenta una delle speranze energetiche del futuro. Anche se non è affatto certo, oggi, che il programma SPS verrà realizzato, vale tuttavia la pena di descriverlo brevemente.
Si tratta fondamentalmente di realizzare nello spazio e porre in orbita geostazionaria una struttura di grandi dimensioni (10 × 5 km; v. figg. 48 e 49) completamente ricoperta di pannelli capaci di assorbire l'energia incidente proveniente dal Sole e di trasformarla in energia di altro tipo da inviare a Terra, perché sia trasformata in energia elettrica da immettere nella rete di distribuzione.
La convenienza di usare un'orbita geostazionaria è evidente, quando si pensi che in tali condizioni l'energia solare è disponibile durante la maggior parte dell'anno, a differenza di quanto accade sulla superficie terrestre. In orbita geostazionaria la radiazione solare subisce una interruzione massima di 72 minuti al giorno nei ventidue giorni che precedono e negli altri ventidue che seguono gli equinozi (v. fig. 40). In totale, i fenomeni di eclisse riducono la potenza disponibile solo dell'1% rispetto a quella totale disponibile nell'arco dell'intero anno. Perciò, a conti fatti, l'energia ottenibile coll'SPS è quattro volte superi ore a quella che sarebbe ottenibile sulla Terra.
Tra i sistemi di conversione dell'energia solare che potrebbero essere utilizzati, va citato in primo luogo quello di conversione fotovoltaica, attualmente in uso in alcuni piccoli impianti di terra e nei pannelli solari che forniscono l'energia ai satelliti artificiali. Poiché il processo fotovoltaico è passivo, le necessità di manutenzione (un problema non solo economico) sono ridotte al minimo. Tuttavia, anche la tecnica di conversione di energia per mezzo di unità di potenza convenzionali a ciclo termodinamico (Brayton o Rankine) sta ricevendo una certa attenzione. La prima soluzione, per quanto assai attraente sul piano della funzionalità, impone la produzione su scala industriale dei materiali tipici delle celle solari. Infatti, la massa delle celle solari è la componente fondamentale in ogni tipo di conversione fotovoltaica; tuttavia, non bisogna dimenticare che l'investimento necessario, in termini di attrezzature, di attività di ricerca e di sviluppo sarebbe più oneroso per parecchi ordini di grandezza, se si volesse realizzare una potenza-base equivalente mediante conversione fotovoltaica sulla Terra. Tra i materiali candidati alla realizzazione delle celle solari, l'arseniuro di gallio appare favorito a lungo termine, mentre per un futuro prossimo è più probabile l'impiego delle celle al silicio.
Il problema successivo riguarda la trasmissione a terra. Le soluzioni sono sostanzialmente due: trasmissione a microonde (2,40 ÷ 2,50 GHz) e trasmissione laser. Al momento attuale appare favorita la prima delle due, che richiede peraltro un gran numero di amplificatori a campo incrociato (amplitrons) e di klystrons. I rendimenti della conversione sono dell'ordine del 70 ÷ 80% per unità rispettivamente di 5 kW (amplitrons) e 70 kW (klystrons) su una potenza complessiva di 5 GW. L'antenna di trasmissione sarà un disco del diametro di circa 1 km; la trasmissione nello spazio alla frequenza indicata avviene con rendimenti altissimi (99%), purché l'antenna ricevente a terra (rectenna) abbia un diametro di circa 10 km.
Descritto così brevemente il sistema, passiamo a discutere, altrettanto brevemente, i problemi che esso pone. Il primo è quello della costruzione in orbita, che è comune a tutte le grandi strutture; la costruzione e il montaggio nello spazio richiedono protezione dagli agenti tipici dello spazio stesso, che è d'altronde, sotto alcuni aspetti (assenza di gravità e di precipitazioni atmosferiche), un ambiente ideale. Allo scopo di minimizzare le spese di trasporto, qualunque sistema di grandi strutture deve ‛impacchettare' al lancio il materiale necessario in forma assai compatta; questa esigenza, unita a quella di avere in orbita strutture molto leggere, porta alla necessità di sviluppare metodi di costruzione automatica in orbita, uno dei quali è indicato schematicamente nella fig. 50. I materiali impiegati vanno dalle leghe leggere alle fibre termoplastiche al carbonio. È evidente comunque che solo lo sviluppo di vettori notevolmente più grandi dello stesso Shuttle e totalmente recuperabili (v. fig. 51) potrebbe consentire il montaggio in orbita, in tempi ragionevoli e con una spesa non eccessiva, di un sistema del genere.
Un altro formidabile problema è rappresentato dalle possibili conseguenze del fascio di radiazioni sull'ambiente. Nel progetto attuale la distribuzione della densità di energia nel fascio di microonde in vicinanza della rectenna è indicata schematicamente nella fig. 52; la densità massima è di 23 mW/cm2, che non sarebbe di per sé troppo elevata anche se non sono noti gli effetti che provocherebbe a lungo termine sull'ambiente circostante. Anche l'aumento medio delle radiazioni a microonde rispetto ai valori attuali (di circa un fattore 10) nelle grandi aree urbane desta qualche preoccupazione.
Formidabili problemi tecnologici sono quelli collegati alla rectenna, che, per le sue enormi dimensioni, richiede un grosso sforzo di ingegneria civile con la costruzione di centinaia di migliaia di pilastri. Per ridurre gli accennati inconvenienti ambientali si pensa anche a una dislocazione della rectenna sul mare, con evidente ingigantimento dei problemi relativi alla sua realizzazione. Ma il problema più grande, che rende fino a oggi incerta l'effettiva realizzazione dell'SPS, è la sua convenienza non solo da un punto di vista economico, ma anche energetico, dato che la messa in funzione di una centrale del tipo sommariamente descritto comporta a sua volta un dispendio di energia recuperabile solo dopo molti anni. Innegabili invece sono i vantaggi sul piano culturale e scientifico, al livello di ‛ricaduta' tecnologica.
È stato calcolato che l'attuale fabbisogno energetico dei paesi della CEE sarebbe totalmente coperto con 35 piattaforme delle dimensioni sopraindicate; ciò dà, pensiamo, un'idea sufficiente della onerosità del problema. Le stime attuali prevedono possibilità realizzative non prima del 2010.
5. L'esplorazione dello spazio
a) Dinamica dei voli interplanetari
Le (59) valgono per ogni tipo di conica kepleriana; lo stesso dicasi per la (65), che di quelle è diretta conseguenza e che, come abbiamo visto, è l'integrale delle forze vive applicato al caso in questione. Detti r0 e V0 rispettivamente i valori della distanza dal corpo attraente e della velocità assoluta, si ha

Il tipo di conica è definito dal valore di E che figura nella (85). Difatti, se si ha E 〈 0, la conica non può estendersi all'infinito, perché altrimenti in quel punto si avrebbe un valore negativo di V2; quindi la conica non può che essere un'ellisse e, come caso particolare, un cerchio: è il caso, già esaminato nel cap. 4, dell'orbita intorno a un corpo centrale di attrazione. Quando è E = 0, si può avere r = ∞, perché in quel punto è V = 0: si tratta del caso limite di un'ellisse che ha un fuoco al finito (anzi, in questo caso, al centro degli assi) e un punto all'infinito, cioè di una parabola. Per valori positivi di E si ha ancora velocità finita all'infinito, si supera la parabola e si ha l'iperbole. I tre casi sono rappresentati nella fig. 53.
Dunque, in un caso estremamente ipotetico in cui agisca costantemente un solo corpo attraente, per far raggiungere a un corpo una distanza infinita è necessario imprimergli la velocità, detta ‛seconda velocità cosmica',
V = √-2-ν-r, (86)
che è √-2 volte superiore a quella necessaria, alla stessa quota r, per la sostentazione orbitale (in realtà le cose si svolgono in maniera diversa, come poi vedremo.) Per velocità inferiori si ha un'orbita ellittica, per velocità superiori iperbolica. Si suole anche dire che la (86) è la velocità alla quale un corpo, inizialmente in quiete, cadrebbe sulla Terra o, eventualmente, su un altro corpo celeste, attrattovi dalla rispettiva forza gravitazionale.
Per l'equazione polare della conica vale ancora la (61), con e 〈 1 per l'ellisse (in particolare, e = 0 per il cerchio), e = 1 per la parabola, e > 1 per l'iperbole.
La geometria dell'orbita iperbolica è rappresentata nella fig. 54: un fuoco è ancora nel centro di attrazione T e il semilatus rectum è dato dal segmento PT; dall'equazione della conica, che riportiamo per comodità,

con e > 1, si deduce che, dovendo in ogni caso essere r > 0, il valore limite di ψ che si ha per r = ∞,
ψ0 = cos-1(− 1/e), (88)
definisce la pendenza degli asintoti dell'iperbole e - una volta assegnato p - la distanza d (che è della massima importanza, come vedremo, nei problemi di trasferimento interplanetario).
Come abbiamo detto, e come è evidente, lo schema fin qui illustrato non è realistico, in quanto è necessario tener conto degli altri corpi celesti, che pure esercitano una forza d'attrazione sul mobile e il cui effetto abbiamo già parzialmente illustrato in sede di analisi delle perturbazioni delle orbite terrestri (v. cap. 4, È b). Tuttavia, è pure chiaro che nello spazio esisteranno zone in cui l'effetto di un particolare corpo celeste è predominante: una zona ove questo avvenga viene chiamata ‛sfera di influenza' del corpo celeste in questione. Questo non significa affatto che, nella zona d'influenza suddetta, l'effetto degli altri corpi sia nullo, ma piuttosto che - almeno in prima approssimazione - la traiettoria seguita durante un volo interplanetario può ritenersi costituita da archi di traiettoria, ciascuno svolgentesi all'interno di una zona d'influenza.
Del concetto di zona d'influenza può darsi una definizione quantitativa precisa. Consideriamo la fig. 55, in cui si hanno due grossi corpi celesti (per esempio la Terra e Venere), che attraggono un corpo S che si muove in prossimità di essi, e trascuriamo l'effetto degli altri corpi. Rispetto a un sistema di riferimento inerziale, dette m, mV, mT le masse dei tre corpi, si ha il sistema di equazioni differenziali (v. Kaplan, 1976)
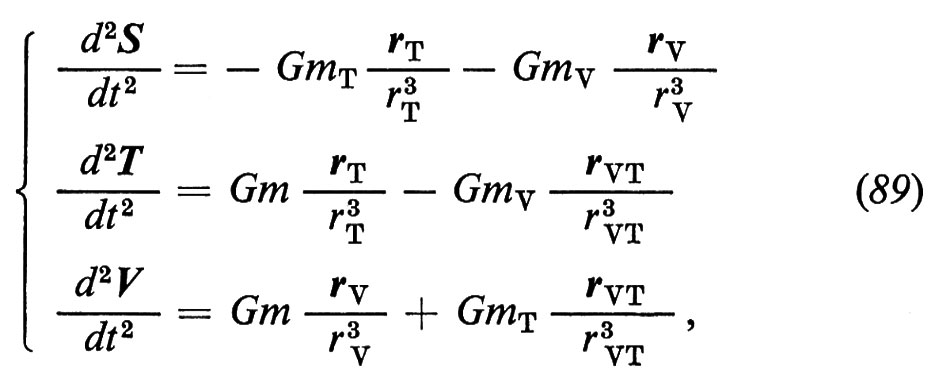
dove G è la costante di attrazione universale (tale che GmT = ν) e le altre grandezze sono indicate nella fig. 55. Facendo la differenza tra la prima e la seconda delle (89), si ha l'equazione del moto relativo di S rispetto a T:

Il primo termine a secondo membro è quello kepleriano di T; il secondo è il disturbo gravitazionale che V porta al moto di rT e che, come abbiamo già detto nel cap. 4, § b, non è tanto dovuto alla forza d'attrazione che V esercita su S, quanto alla differenza tra questa forza e quella che S risentirebbe se fosse posto in T. Analogamente si ha

Ora, per stabilire quale dei due corpi è quello che veramente ‛disturba' l'altro, non c'è che da confrontare l'influenza di ciascuno dei due termini al secondo membro delle (90) e (91) rispetto al corrispondente termine newtoniano. Effettuando i relativi calcoli geometrici, che non è qui il caso di riportare, si ottiene, per il moto di S rispetto a V, il rapporto disturbo/termine newtoniano
e, per il moto rispetto a T,

Eguagliando i valori di ρV e ρT si ottiene la condizione per cui i due disturbi sono percentualmente uguali, e resta così definita la sfera d'influenza. Ulteriori esemplificazioni analitiche, su cui non insistiamo, portano a concludere che il rapporto rV/rVT, che definisce la sfera d'influenza, è

I raggi delle sfere di influenza dei singoli pianeti del sistema solare sono indicati nella tab. IV (v. Kaplan, 1976).
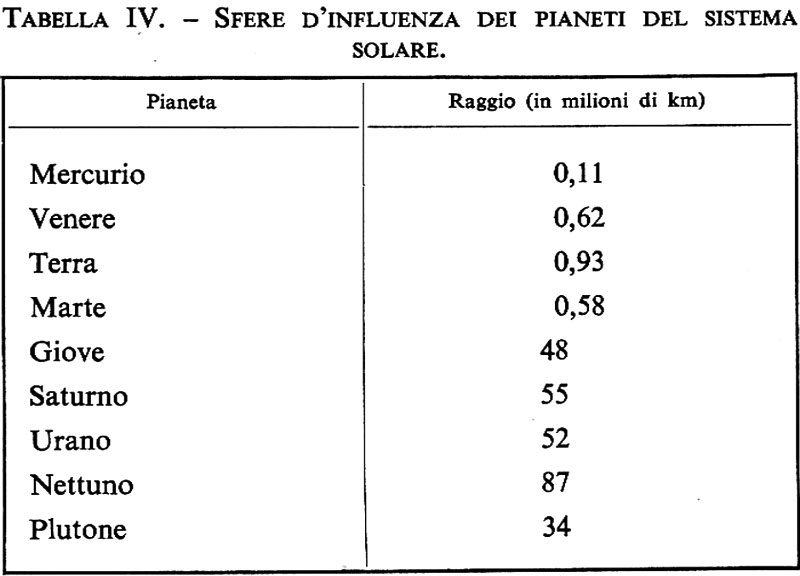
Per il buon successo di una missione spaziale è di fondamentale importanza il progetto relativo, che riguarda la scelta dell'epoca di lancio e la sequenza delle operazioni da eseguire durante la traiettoria di avvicinamento all'obiettivo e nella fase terminale. A causa delle grandi quantità di energia in gioco, è fondamentale lo studio dell'epoca ottima di lancio. Già dal 1925 W. Hohmann descrisse la traiettoria ottima tra due orbite circolari concentriche quali sono, con grande approssimazione, quelle della Terra e del pianeta obiettivo della missione. Tale traiettoria ottima è un'ellisse (ellisse di Hohmann) tangente alle due orbite (v. fig. 24). Consideriamo, per esempio, la coppia Terra-Marte (che è coerente con quella della fig. 24, in quanto l'orbita di Marte è esterna a quella terrestre). La Terra ha un periodo di circa 365 giorni, Marte di 687: la loro distanza varia tra un minimo e un massimo e l'intervallo di tempo tra due minimi (congiunzione) successivi è di circa due anni. Inoltre, a causa della non perfetta circolarità delle orbite e della loro diversa inclinazione, il suddetto minimo è variabile e si verifica un ‛minimo dei minimi' ogni sette congiunzioni circa. Si ha quindi una ‛finestra di lancio' con cadenza biennale, centrata intorno al minimo locale, e condizioni eccezionalmente favorevoli a ritmo quindicennale: l'ultima volta che queste si verificarono fu nel 1971 (epoca del lancio delle sonde sovietiche Mars 2 e Mars 3), la prossima sarà nel 1986.
Si consideri l'ellisse della fig. 24 relativa al trasferimento Terra-Venere, a partire da una orbita terrestre di parcheggio di 500 km. È necessario anzitutto ‛svincolare' il veicolo spaziale dall'attrazione terrestre, il che si ottiene imprimendogli la seconda velocità cosmica, pari a 11,28 km/s, depurata della velocità orbitale (nel caso attuale 7,78 km/s), che il veicolo già possiede; l'incremento necessario è quindi di 3,50 km/s. A questo è necessario sommare (vettorialmente) la variazione richiesta perché la velocità iniziale del veicolo sia pari a quella all'afelio dell'ellisse ξ (in quanto l'orbita di Venere è interna rispetto a quella terrestre). Impiegando le relazioni kepleriane, si ha, per l'incremento suddetto,

dove ν è la costante d'attrazione solare e le distanze r e a sono indicate nella fig. 24. L'incremento Δv varia con a, che va calcolata, naturalmente, sulla posizione che Venere avrà al momento dell'ingresso in orbita del veicolo, e che è del tutto diversa da quella che ha all'istante di lancio. Nella situazione di Hohmann si ha Δv = 31,96 km/s, cui è peraltro necessario sottrarre la velocità orbitale della Terra rispetto al Sole (29,78 km/s). È necessario quindi imprimere al veicolo una velocità di 2,18 km/s superiore alla velocità di fuga, in direzione opposta a quella dell'orbita terrestre.
Nelle successive fasi del volo, il veicolo è soggetto alle influenze combinate dei vari pianeti, ciascuno dei quali possiede una sua ‛sfera d'influenza', come si è già visto. Per ciò che riguarda l'effetto prodotto dal campo gravitazionale di un pianeta sul moto di un veicolo-sonda, si può dire che, nel sistema di riferimento del pianeta, la velocità della sonda, all'ingresso (W-) e all'uscita (W+) della sfera di influenza del pianeta, rimanga eguale in modulo, ma vari in direzione. La velocità assoluta, pertanto, può variare grandemente e il suo modulo V diminuirà se il veicolo passa davanti al pianeta e aumenterà nel caso contrario (v. fig. 56). Questo fatto può essere sfruttato allo scopo di ridurre la velocità di ingresso sul pianeta.
b) I sistemi dei veicoli spaziali.
La fig. 57 mostra un modello della sonda Viking 1, che è costituita essenzialmente da una struttura reticolare metallica e dalle zampe di atterraggio. La struttura metallica contiene tutte le apparecchiature di bordo, tra cui importanza fondamentale riveste il calcolatore (non indicato nella fig. 57), che comanda, mediante un programma già inserito, le successive manovre di volo e quelle specifiche della missione scientifica cui la sonda è destinata (i comandi emessi da Terra raggiungerebbero Marte dopo 20 minuti). Le comunicazioni con la Terra sono mantenute per mezzo di due antenne, una ad alto e l'altra a basso guadagno. Nella flg. 57 è visibile il soil sampler, ossia la gamba meccanica che estrae campioni di suolo che sono analizzati a bordo della sonda. Particolarmente importanti sono i sistemi di stabilizzazione e di controllo d'assetto del veicolo, di solito realizzati con un meccanismo a getti. La posizione del veicolo rispetto a un riferimento fisso è ottenuta mediante sensori (di assetto e di posizione) solari e stellari.
Il sistema propulsivo per il volo spaziale interplanetario deve possedere essenzialmente due caratteristiche: lunga durata, con alta affidabilità e bassi consumi di propellente, e alto impulso specifico. Questi vantaggi sono offerti in massimo grado dalla ‛propulsione elettrica', che sarà sempre più largamente applicata in futuro. In generale un sistema di propulsione elettrica comprende i seguenti elementi: a) un generatore di energia (solare, nucleare o chimica); b) un sistema di conversione, per convertire l'energia del generatore in energia elettrica; c) un sistema del propellente; d) uno o più thrusters, che convertono l'energia elettrica in energia cinetica del getto.
I tipi fondamentali di propulsione elettrica sono: 1) elettrotermici, in cui il propellente viene riscaldato elettricamente e fatto espandere attraverso l'ugello termodinamicamente; 2) elettrostatici, basati sull'interazione di un campo elettrostatico con particelle cariche del getto; 3) elettromagnetici, basati sull'interazione di campi elettrici e magnetici nel plasma propellente. Con questi sistemi si può prevedere di raggiungere impulsi specifici assai elevati (1.000 s e più), peraltro con spinte piuttosto basse.
c) L'esplorazione del sistema solare
L'esplorazione della Luna e della superficie lunare da parte sovietica ebbe inizio gia nei primissimi tempi dell'era spaziale con il programma Lunik. Il 2 gennaio 1959, appena un anno e mezzo dopo il lancio dello Sputnik, fu inviata verso il nostro satellite naturale la sonda Lunik 1, il primo oggetto fabbricato dall'uomo in grado di raggiungere la seconda velocità cosmica. Il Lunik, che avrebbe dovuto schiantarsi sulla superficie lunare, passò invece a circa 6.000 km da essa e si inseri in un'orbita solare, naturalmente incontrollata. L'impresa riuscì invece alla successiva sonda, il Lunik 2, lanciata il 12 settembre 1959, che si infranse sul suolo lunare lasciandovi gli emblemi dell'Unione Sovietica. L'annuncio destò ovviamente grandissimo scalpore presso l'opinione pubblica mondiale che, con grande superficialità, alimentata anche dai grandi mezzi di informazione, giudicò ormai definitivamente risolta a favore dell'Unione Sovietica la cosiddetta ‛sfida spaziale'.
Tutto il programma Lunik, per un totale di una trentina di lanci, fu suddiviso in gruppi di missioni, ciascuno dei quali aveva lo scopo preciso di far progredire la tecnologia e la tecnica dell'esplorazione lunare e, più in generale spaziale, in un determinato settore. La missione della sonda Lunik 3 (che concluse e completò la prima serie), lanciata il 4 ottobre 1959, sarà ricordata come una delle più sensazionali e spettacolari imprese dei primi tempi della astronautica: per la prima volta, infatti, si poterono osservare le immagini dell'altra faccia della Luna, ossia di quella non visibile dalla Terra. I risultati della missione furono presentati dallo scienziato sovietico Blagonravov in una memorabile seduta del COSPAR (Committee on SPAce Research), a Nizza, nel gennaio 1960, e appresi con viva emozione da studiosi di tutti i paesi. Particolarmente interessante fu la tecnica di lancio seguita dai sovietici; il Lunik 3 era stato infatti immesso in un'orbita terrestre con l'apogeo a circa 480.000 km (si ricordi che la distanza Terra-Luna è di 380.000 km), per cui fu la stessa gravità lunare a catturare la sonda, facendola passare sopra la superficie alla distanza prevista (6.000 km) per consentirle di effettuare le riprese fotografiche.
I sovietici mostravano così di essersi completamente impadroniti delle tecniche di flyby lunare.
Il successivo problema da risolvere, anche in vista di una possibile esplorazione umana della Luna (che per i Sovietici non è ancora avvenuta), era quello dell'atterraggio dolce (soft-landing), alla cui risoluzione fu destinata la serie di sonde il cui primo esemplare fu lanciato il 2 aprile 1963 circa tre anni e mezzo dopo il Lunik 3. Tutti i lanci fallirono, per svariati motivi, e si dovette attendere il 1966 per avere il primo effettivo soft-landing lunare con la sonda Lunik 9, dalla strana forma ellittica (v. fig. 58), staticamente bilanciata in posizione verticale, dotata di quattro supporti (petali), estratti dal corpo principale su comando impartito da Terra. Il Lunik 9 inviò varie fotografie della superficie lunare, riprese in diverse condizioni di illuminazione, ma è chiaro che lo scopo principale della missione fu la messa a punto delle tecniche di atterraggio e non i risultati scientifici. Altro grande avvenimento fu il volo spaziale del Lunik 10, nell'aprile 1966, primo satellite artificiale lunare, posto su un'orbita di 350 × 1.020 km, con inclinazione di 71°. Il Lunik 10 trasmise informazioni di grande interesse scientifico riguardanti la radiazione, i fenomeni elettromagnetici nello spazio e le armoniche superiori del campo gravitazionale lunare, determinate attraverso il rilievo delle perturbazioni dell'orbita della sonda, secondo una tecnica non dissimile da quella gia usata nel caso terrestre. Al Lunik 10 fecero seguito altri satelliti lunari e altre sonde a soft-landing, con lo scopo di preparare, operativamente e tecnologicamente, la via alle missioni del Lunokhod. Tra le altre, va ricordata la missione del Lunik 15, lanciata poche ore prima dell'Apollo, che avrebbe dovuto prendere campioni del suolo lunare, per riportarli a Terra. La sonda rimase effettivamente in orbita durante la missione degli astronauti statunitensi tanto che si rese necessario un intervento ufficiale da parte delle autorità americane per evitare interferenze a livello di radiofrequenze tra il sistema di comando del Lunik 15 e quello delle comunicazioni dell'Apollo. La discesa sulla superficie lunare del Lunik 15 fallì. Il tentativo riuscì invece con la successiva sonda, ma un altro spettacolare successo dovevano conseguire i sovietici con la sonda 17 (v. fig. 59), che portava il veicolo lunare Lunokhod. Interessante anche qui la tecnica di lancio, consistente in un primo inserimento in orbita circolare, seguito da un trasferimento su orbita ellittica più bassa e da soft-landing.
Il Lunokhod (veicolo lunare) era costituito da una grossa scatola metallica ermeticamente chiusa, di circa due metri di diametro, contenente la strumentazione e le apparecchiature di ripresa e di trasmissione, sostenuta da un telaio mosso da quattro paia di ruote; il veicolo veniva messo in moto da Terra mediante cariche fatte esplodere in successione, che gli conferivano una certa velocità, mentre la frenatura avveniva automaticamente, per mezzo di sensori che rivelavano irregolarità troppo pronunciate del suolo lunare (burroni, buche, massi, pendenze troppo forti).
Particolarmente impegnativo si rivelò il problema del controllo termico, a causa dei forti sbalzi di temperatura tra ‛giorno' e ‛notte' sul suolo lunare: a ogni levar del sole era necessario aprire la scatola per ricaricare le batterie con l'energia solare, badando bene di richiuderla prima che i raggi diventassero troppo intensi. Va pure ricordato che, a causa della distanza Terra-Luna, di circa un secondo luce, l'immagine del veicolo appariva alla squadra di controllo, che la seguiva da Terra su uno schermo televisivo, arretrata di qualche metro rispetto alla posizione effettiva istantanea: ciò rendeva la guida ancora più difficile. La missione del Lunokhod 2, lanciato nel 1973, durò cinque giorni; il suo scopo, pienamente raggiunto, era quello di saggiare le condizioni della superficie lunare, irta di picchi, di burroni, di irregolarità, con pendenze fino all'80%. Il Lunokhod viaggiava su questo inferno con stupefacente disinvoltura, ma forse il risultato più importante fu l'accertamento delle condizioni di visibilità, perfette durante la notte lunare, meno soddisfacenti durante il giorno, a causa di una specie di nube di polvere cosmica che circonderebbe il nostro satellite naturale.
Il programma sovietico è poi continuato con le altre sonde Lunik, che hanno ottenuto risultati scientifici sempre interessanti. In particolare, va ricordato che, a partire dal Lunik 16, lanciato nel settembre 1970, è iniziato il programma di analisi di campioni di suolo lunare, raccolti a bordo di vettori rilanciati verso Terra in volo balistico. Così, ad esempio, la sonda 24, del 1976, riportò a Terra una quantità imprecisata di materiale, una piccola parte del quale fu anche esaminata in laboratori statunitensi.
In sostanza, l'esplorazione sovietica della Luna è stata assai intensa e condotta con apparecchiature scientifiche automatiche, cioè senza equipaggi umani. È difficile dire se questa decisione abbia corrisposto a un effettivo piano di politica scientifica, o se sia stata dettata da difficoltà tecnologiche operative. Sta di fatto che un alto esponente sovietico dichiarò, fin dall'inizio, che l'esplorazione automatica sarebbe costata un decimo di quella umana, a parità di risultati scientifici. Inoltre i sovietici dimostrarono sin dall inizio una grande padronanza delle più sofisticate tecniche lunari: i molti insuccessi (da mettere comunque sempre in conto in imprese del genere) furono dovuti a fattori accidentali.
Assai più ridotto, e con scopi diversi, fu il programma lunare statunitense, ideato in funzione del progetto Apollo, che rientra nel novero dei voli manned, ossia con equipaggio umano (v. cap. 6). Lo scopo principale dei lanci americani verso la Luna era appunto quello di raccogliere informazioni da utilizzare poi per preparare lo sbarco degli astronauti. Così fu varato il programma Ranger, basato su una serie di sonde di peso crescente, da 40 a 350 kg, fornite di sofisticati apparati ottici e televisivi e di un accurato sistema di controllo d'assetto. I primi sei lanci furono altrettanti insuccessi, il che sembrò mettere in forse la buona riuscita del progetto Apollo; ma finalmente una notevole messe di risultati fu ottenuta con gli ultimi tre lanci della serie Ranger, le sonde 7-8-9, che riuscirono a scattare complessivamente più di 17.000 fotografie a distanza ravvicinata, con potere risolutivo fino a 25 cm.
Il passo successivo fu effettuato col programma dei Lunar Orbiter; mentre i Ranger impattavano sul suolo lunare, gli Orbiter come dice il nome venivano posti in orbita intorno alla Luna, per verificare le tecniche di discesa e per raccogliere dati scientifici, sempre in vista del progetto Apollo. Tutti e cinque i voli Orbiter furono coronati da successo. L'Orbiter 1 (agosto 1966), posto in orbita eccentrica, fotografò una vastissima porzione della superficie lunare, comprendente ovviamente anche le zone destinate all'atterraggio dell'Apollo. Le perturbazioni dell'orbita fornirono preziose informazioni sulla distribuzione della gravità lunare e soprattutto sui suoi effetti secolari, che, come è naturale, hanno grande importanza nel caso in cui un veicolo debba restare a lungo in orbita intorno alla Luna. I cinque satelliti lunari (l'ultimo lanciato nell'agosto 1967), su comando impartito da Terra, cambiavano orbita, si alzavano e si abbassavano fino all'impatto finale, sempre controllato, quando la missione era da ritenersi conclusa.
Il terzo e ultimo programma pre-Apollo fu il Surveyor, destinato soprattutto alla messa a punto delle tecniche di soft-landing (peraltro, come si è visto, già da tempo possedute dai sovietici). Le sette sonde Surveyor (con due soli insuccessi), lanciate tra il gennaio 1966 e il gennaio 1968, erano costituite (v. fig. 60) da una capsula con gli strumenti ottici e di misura, montata su un carrello a tre zampe. I Surveyor venivano fatti atterrare sulla Luna direttamente, cioè senza previo inserimento su un'orbita di parcheggio, azionando i retrorazzi in vicinanza della superficie lunare, per ridurre la velocità al valore richiesto (12 km/h). I risultati ottenuti furono della massima importanza per il successo della missione Apollo.
Anche per l'esplorazione di Marte i sovietici si mossero con notevole anticipo rispetto agli americani, inviando sonde verso il pianeta ‛fratello' fin dal 1962; tuttavia le tre sonde lanciate quell'anno non riuscirono, per vari motivi, a raggiungere la superficie di Marte, anche se la seconda (denominata Mars 1) passò a breve distanza dal pianeta (senza peraltro trasmettere dati significativi, a causa di un guasto nel sistema del controllo di assetto di antenna).
Si dovette attendere fino al maggio 1971 per la ripresa dell'attività di ricerca su Marte da parte sovietica. Questa data, la stessa scelta per il lancio del Mariner 9, corrispondeva a una grande finestra di lancio (la prossima, come si è detto, si avrà nel 1986). Tuttavia la prima sonda (Cosmos 419) fallì di nuovo, mentre la seconda (Mars 2) ottenne qualche risultato: la capsula di atterraggio riuscì a scendere sulla superficie del pianeta, separandosi dal modulo orbitante, ma impattò contro il suolo e si distrusse. Il modulo orbitante continuò invece a girare intorno al pianeta, fornendo importanti risultati scientifici sulla chimica e sulla fisica dell'atmosfera, in particolare sul forte contenuto in anidride carbonica (~ 90%) e sulla quasi totale assenza di azoto e di vapor d'acqua.
Pochi giorni dopo fu lanciato il Mars 3, che effettuò un atterraggio parzialmente soft e riuscì a trasmettere alcune immagini ravvicinate della superficie marziana, peraltro fortemente disturbate da una delle frequenti tempeste di polvere. Anche in questo caso il modulo orbitante trasmise per circa tre mesi dati e informazioni scientifiche.
Non è compito di questo brevissimo riassunto presentare le sensazionali scoperte che seguirono il volo dei Mars 2 e 3, alcune delle quali furono confermate da successive esplorazioni, altre invece corrette. Tali risultati sembravano escludere la presenza di ogni forma di vita e di vegetazione, su una superficie coperta di polvere che provoca le tempeste, di cui si è detto, e che si alterna a distese rocciose. Queste ultime zone, la cui presenza fu rilevata dall'analisi della conducibilità termica del suolo, a sua volta determinabile dall'analisi della variazione temporale della temperatura, sarebbero i ‛mari' di cui da secoli si parlava sulla base delle osservazioni astronomiche convenzionali: i ‛mari', infatti, sono in generale più caldi delle altre zone e si raffreddano più lentamente. Altre informazioni riguardarono la densità atmosferica (valutata circa 1/200 di quella terrestre, al suolo dei due pianeti) e le temperature superficiali, che variano assai fortemente, da 15 °C a −110 °C ai poli.
Interessante fu anche la tecnica di lancio, schematizzata nella fig. 61. Da un'orbita di parcheggio intorno alla Terra, la sonda viene trasferita su un'altra orbita, eliocentrica, verso Marte; la separazione tra orbiter e lander (modulo di atterraggio) avviene prima dell'inserimento del primo nella sua orbita; dopo la separazione le due sezioni si dirigono l'una verso l'orbita definitiva, l'altra verso la superficie del pianeta.
Nel 1973, pochi giorni prima della fine della finestra di lancio biennale, furono inviate le sonde Mars 4 e 5 e, successivamente, la 6 e la 7, che dovevano realizzare un ambizioso programma di ricerca, fornendo osservazioni e risultati combinati per effetto dello sfasamento nello spazio e nel tempo. La missione dette qualche risultato ma fu, nel suo complesso, un insuccesso.
Gli Stati Uniti hanno basato il loro programma di ricerche su Marte soprattutto sulle sonde Mariner, di cui parleremo anche a proposito dell'esplorazione di Venere. La missione della prima sonda, il Mariner 3, si risolse in un insuccesso; a distanza di pochi giorni, però, nel novembre 1964, fu lanciata la sonda 4, che dopo un volo di circa 230 giorni sorvolò Marte alla quota di 9.800 km, prendendo per la prima volta fotografie di un pianeta a distanza così ravvicinata. Il Mariner 4 raggiungeva il peso già rispettabile di 260 kg ed era fornito di strumenti ottici e di misuratori di raggi cosmici. La trasmissione dei dati dal Mariner 4 durò circa dieci giorni e le immagini mostrarono che Marte, contrariamente a quanto si era sempre ritenuto, presenta un aspetto assai più simile alla Luna che non alla Terra, cosparso com'è di crateri e di profondi avvallamenti. Ciò fu confermato, come si è detto, anche dalle contemporanee osservazioni sovietiche.
Un grande successo, scientifico e tecnologico, arrise alle sonde Mariner 6 e Mariner 7, lanciate rispettivamente il 24 febbraio e il 27 marzo 1969; dopo un viaggio assai più breve di quello delle due sonde precedenti (circa 388 milioni di chilometri per Mariner 6, circa 316 per Mariner 7, contro i 500 e più di Mariner 4), che durò rispettivamente 156 e 130 giorni, le due sonde giunsero in prossimità di Marte nel luglio 1969, pochi giorni dopo lo sbarco sulla Luna degli astronauti dell'Apollo. Forse per questa coincidenza, essendo l'opinione pubblica mondiale polarizzata verso l'altra spettacolare impresa spaziale, la missione non ebbe la risonanza che meritava. Ambedue le sonde passarono a circa 3.500 km dalla superficie di Marte e le fotografie trasmesse a Terra durante i periodi di minima distanza (ciascuno di poco più di un'ora), fornirono alcune informazioni fondamentali sulla conformazione ancora in gran parte sconosciuta del pianeta. In particolare fu (o almeno sembrò) accertato che la calotta di ghiaccio del polo sud è composta in gran parte da anidride carbonica solida. Le caratteristiche dell'atmosfera, anch'essa quasi tutta composta di CO2, l'assenza pressoché totale di acqua, l'aspetto della superficie sembravano escludere ogni possibile forma di vita.
Nel 1971, in coincidenza con la grande finestra di lancio, anche gli Stati Uniti inviarono altre due sonde su Marte: la 8 fallì, ma la 9 poté essere immessa su un'orbita di 1.387 × 7.140 km e restò attiva per circa un anno. Fu il primo satellite artificiale posto in orbita attorno a un altro pianeta. Anche in questo caso si ebbero risultati sensazionali: tra gli altri, la definitiva distruzione del mito dei ‛canali' di Marte; la scoperta di una forte attività geologica, con vulcani di enormi dimensioni; la spiegazione della variabilità di colore, rivelata dalle osservazioni da Terra, dovuta alle violente tempeste di polvere. Fu ancora una volta confermata la quasi totale assenza di vapor d'acqua nella atmosfera di Marte, sebbene alcune sinuosità osservate specialmente in vicinanza delle calotte polari facessero pensare a letti di antichi corsi d'acqua (o, eventualmente, di altro liquido), peraltro completamente essiccati. Molto interessanti furono anche le fotografie relative ai due satelliti naturali di Marte, Fobos e Deimos, ciascuno del diametro di una ventina di chilometri. La strumentazione del Mariner 9 era assai raffinata; il potere risolutivo ottico era di 275 metri; la sonda presentava larghe appendici flessibili per i pannelli solari (più di 2 metri di lunghezza) e aveva un accurato sistema di controllo d'assetto. Il peso totale superava i 1.000 kg, di cui circa la metà era costituita dal propellente necessario per l'inserimento in orbita (funzionamento dei retrorazzi).
Il programma statunitense continuò con le due sonde Viking, lanciate nel 1975. La storia di questi lanci ha risvolti anche di natura politica: inizialmente previsti per il 1973, furono poi rinviati alla successiva ‛piccola finestra di lancio', posteriore di due anni, per motivi di carattere finanziario. Inoltre, si era pensato di programmare le date di lancio in modo che l'arrivo coincidesse con il 4 luglio 1976 duecentesimo anniversario dell'indipendenza americana. Invece, vari inconvenienti tecnici, capitati sia al lanciatore sia alla sonda, fecero rinviare il lancio stesso di nove giorni (20 agosto 1975) per il Viking 1 e di diciannove giorni (9 settembre 1975) per la sonda 2.
Lo schema delle sonde Viking è rappresentato nella fig. 62; destinate al soft-landing, erano costituite dalle due solite sezioni, l'orbiter e il lander. L'orbiter aveva un peso totale di 2.325 kg (compresi 1.422 di propellente) ed era dotato di strumenti per misurazioni dirette (eventuale contenuto di vapor d'acqua nell'atmosfera, gravità, densità del pianeta) e per l'assistenza al lander. Quest'ultimo, con un peso complessivo di 1.067 kg (491 di propellente), chiuso dentro uno scudo di protezione biologica atto a impedire la contaminazione dell'atmosfera marziana da parte di microorganismi terrestri, era montato su un treppiedi ed era fornito di una pala automatica esterna, destinata a raccogliere campioni del suolo marziano, e di una sofisticata apparecchiatura per l'analisi chimica dei campioni estratti e per altre misure meteorologiche, sismografiche, biologiche, ecc.
Come si è detto, il Viking 1 fu lanciato il 20 agosto 1975; durante il volo di avvicinamento a Marte, non poche pressioni furono esercitate sul team di scienziati che lo seguiva perché fosse aumentata la velocità in modo da rispettare la data fatidica del 4 luglio 1976 per l'atterraggio. Tuttavia questo aumento di velocità fu giudicato troppo pericoloso per assicurare un atterraggio che fosse veramente soft.
Le fotografie della superficie di Marte, scattate quando la sonda era ormai a soli 1.500 km di quota, sul suo ‛periapside', rivelarono un'altissima densità di crateri. Finalmente, il 20 luglio si iniziò la manovra di distacco dei due moduli, con la successiva riduzione della velocità del lander, che portò alla sua deorbitazione e all'atterraggio. Subito dopo iniziò la trasmissione dei dati, che rivelò una distesa di rocce di color rosso, su uno sfondo di cielo rosa acceso; l'estrazione di campioni dal suolo e la successiva analisi misero in evidenza una grande quantità di ossigeno, che avrebbe potuto derivare da attività biologica, anche se, fino a oggi, non si è raggiunta la certezza assoluta in un senso o nell'altro.
Per il Viking 2, che, come si è detto, seguì il Viking 1 a pochi giorni di distanza, fu scelto con grande cura il punto di atterraggio, nella speranza che si potessero ottenere informazioni sostanzialmente diverse e complementari rispetto a quelle del primo; invece i risultati furono assai simili e anche in questo caso non si riuscì a dare una risposta certa alla assillante questione della vita su Marte. L'opinione ufficiale della NASA è che, se anche su Marte ci fossero forme di vita, le sonde del tipo Viking non riuscirebbero a stabilirlo con certezza.
La sonda Venus 1, del febbraio 1961, inaugurò l'esplorazione, o almeno i tentativi di esplorazione, del pianeta Venere. Si trattò anche della prima sonda interplanetaria sovietica, anzi mondiale, cui non arrise però il successo che una così audace impresa avrebbe meritato. Nemmeno la Venus 2 riuscì a raggiungere il pianeta, contro cui si infranse invece la Venus 3 senza trasmettere alcuna informazione. Fondamentale fu invece la messe di risultati raccolta dalla Venus 4, che discese sulla superficie venusiana con un paracadute e trasmise dati per più di un'ora e mezza, il tempo di permanenza nell'atmosfera densissima e caldissima (temperature dell'ordine dei 300 °C). Si ritiene che la sonda abbia finito per urtare contro uno dei picchi della superficie disintegrandosi. Una sorte analoga toccò alla Venus 5, cui furono apportate alcune innovazioni tecnologiche, risultanti dall'esperienza della sonda precedente. Solo cinque giorni dopo fu lanciata la Venus 6, il cui viaggio durò in totale 127 giorni, quattro meno della Venus 5, per cui la discesa avvenne a sole 24 ore di distanza. I risultati scientifici trasmessi indicavano ancora temperature e pressioni estremamente elevate: dai 300 °C ai 400 °C per le prime, dai 70 ai 150 kg/cm2 per le seconde, con valori delle decelerazioni di discesa dell'ordine dei 350 g. Queste sollecitazioni eccezionali avrebbero procurato il collasso strutturale delle due astronavi.
Di questi insegnamenti fecero tesoro gli scienziati e gli ingegneri sovietici, nel progetto della successiva sonda Venus 7, dotata di potenti antenne trasmittenti, i cui segnali furono interpretati come una prova certa dell'atterraggio su Venere quando la loro intensità si ridusse a una frazione insignificante dei valori mantenuti durante la discesa. Le informazioni della Venus 7, che portava gli emblemi sovietici, confermarono i valori eccezionalmente elevati di cui si e gia parlato.
Un ulteriore salto di qualità si ebbe con la sonda 8, composta di due moduli: di questi, quello di discesa sembra sia atterrato regolarmente, mentre quello di servizio bruciò nell'atmosfera venusiana. Va notato incidentalmente che, in tutte le sonde Venus, il peso complessivo non variò sensibilmente, mantenendosi sempre di poco superiore ai 1.000 ÷ 1.100 kg; peraltro i continui perfezionamenti tecnologici, consentiti dalle conoscenze sempre più sicure delle condizioni del pianeta, si traducevano in un arricchimento delle strumentazioni e in un miglioramento delle prestazioni. Così la Venus 8 era fornita di un sistema di refrigerazione che le permise di resistere bene alle altissime temperature incontrate in discesa. Sorprendentemente, la Venus 8 indicò una visibilità alla superficie piuttosto scarsa e una minima oscillazione delle temperature al suolo tra giorno e notte (ciascuno della durata di circa due mesi terrestri).
Con la Venus 9, del 1975, si giunse alla formula del doppio modulo, orbiter + lander, e si riuscì finalmente a ottenere le immagini della superficie venusiana; immagini tutt'altro che oscure, contrariamente a quanto le precedenti osservazioni - appunto quelle della sonda 8 - avevano fatto temere, che rivelarono una superficie coperta di picchi e di irregolarità pronunciate. La Venus 10, che atterrò in un punto notevolmente lontano dal precedente, confermò i valori ormai noti (465 °C, 92 atmosfere al suolo, con venti moderati di circa 3,5 m/s, ma che, a causa della forte densità, corrispondono a pressioni dinamiche di enorme entità, inimmaginabili sulla Terra) e confermò pure la quasi totale assenza di polvere, che induce a classificare Venere tra i pianeti giovani, in via di evoluzione.
Il lancio della prima sonda americana verso Venere (il Mariner 1), avvenuto nel 1962, fu un insuccesso; dopo un mese fu lanciato il Mariner 2, che riuscì a sorvolare il pianeta alla quota di 36.000 km e dette le prime informazioni sugli elevati valori, soprattutto di temperatura, di cui si è parlato. La sonda, inoltre, rivelò una quasi totale assenza di campo magnetico e di fasce del tipo Van Allen. L'esplorazione riprese nel 1967 per mezzo del Mariner 5, i cui risultati non furono però molto esatti.
Si arriva così al 1973, quando viene lanciato il Mariner 10, primo esempio di missione multipla, su Venere e Mercurio. In realtà, in questa missione, il ruolo di Venere fu quello di incurvare, per mezzo della sua gravità, la traiettoria della sonda, in modo da farle raggiungere Mercurio, secondo la ben nota tecnica di flyby. Tuttavia, al passaggio su Venere, il Mariner 10 effettuò riprese di straordinario interesse, riprendendo una visione di insieme della circolazione atmosferica del pianeta. A questo punto una correzione di rotta mise la sonda in direzione di Mercurio, che fu sorvolato a bassissima quota, a meno di 200 km. La superficie del pianeta apparve subito assai simile a quella lunare, con escursioni di temperatura tra giorno e notte dell'ordine dei 700 °C, dovute alla totale assenza di atmosfera e alla vicinanza al Sole. Il Mariner 10 sorvolò Mercurio tre volte, fornendo informazioni sulla gravità, sulla densità, sullo stato interno di tensione e sulla costituzione del pianeta; fu anche accertato che Mercurio è uno dei pochi pianeti dotati di campo magnetico, dovuto a masse interne. Assai interessante fu, in questo caso, un dettaglio tecnico: a causa del quasi totale esaurimento del propellente di manovra, si decise di applicare la tecnica della ‛vela solare'; la vela era costituita dall'antenna di trasmissione e dai pannelli solari, mentre il propellente erano i fotoni solari, ossia la pressione di radiazione, di cui abbiamo già parlato a proposito delle perturbazioni delle orbite dei satelliti artificiali terrestri.
Il 3 marzo 1972 veniva lanciata la sonda statunitense Pioneer 10, destinata all'esplorazione di Giove; la velocità iniziale scelta (52.000 km/h, superiore quindi alla seconda velocità cosmica) era tale da far giungere la sonda stessa alla minima distanza dal pianeta (130.000 km) in circa 1 anno e 9 mesi.
Il viaggio del Pioneer 10 fu di estrema importanza agli effetti della conoscenza delle caratteristiche dello spazio interplanetario del sistema solare. Così, il passaggio attraverso la corona degli asteroidi aveva destato, in fase di previsione, non poche preoccupazioni; era stato calcolato, infatti, che, date le altissime velocità in giuoco, anche un corpo piccolissimo, del diametro di circa mezzo millimetro, avrebbe danneggiato il veicolo spaziale in modo irreparabile. Invece, il Pioneer 10, quando uscì dalla cintura, non presentava alcuna lesione apprezzabile, per motivi che non sono ancora stati chiariti; comunque i risultati vennero assunti come prova che anche future astronavi con equipaggio umano avrebbero potuto attraversare indenni questa zona pericolosa. Qualche mese più tardi, l'astronave venne a trovarsi nel mezzo di una delle più vistose tempeste solari che siano mai state osservate, e anche in questo caso le informazioni relative alla distribuzione delle particelle cariche furono molte e importanti. Finalmente, nel novembre 1973, districandosi nel labirinto gravitazionale delle lune di Giove e sfruttando la gravità del pianeta e dei suoi satelliti per accelerare, decelerare e modificare la traiettoria, il Pioneer 10 riuscì a prendere una serie di fotografie. Furono così rilevati dei particolari delle 13 lune suddette (in realtà a quell'epoca si riteneva che fossero 12), salvo di quella forse più interessante di tutte, Io. I risultati confermarono l'esistenza della ‛grande macchia rossa', nell'emisfero sud, sulla natura della quale furono avanzate varie ipotesi; le osservazioni del Pioneer 10 avrebbero poi mostrato l'esistenza di altre, più piccole, macchie rosse nell'atmosfera del pianeta.
La successiva sonda, il Pioneer 11, fu lanciata il 5 aprile, quando il Pioneer 10 era già vicinissimo a Giove. L'esperienza fatta consentì un avvicinamento maggiore dei precedenti e quindi migliori e più dettagliate osservazioni. Tra i risultati più significativi, la conferma che Giove è un pianeta allo stato liquido, che irradia più calore di quanto non ne riceva dal Sole (quindi tende a raffreddarsi), e che su di esso esiste un forte campo magnetico, diviso in due zone di intensità assai diversa.
Esaurita la missione su Giove, ciascuna delle due sonde, sotto l'azione della gravità e della velocità raggiunta, ha continuato la sua corsa verso le zone più esterne del sistema solare.
La più recente missione spaziale a lungo raggio è in fase di compimento da parte delle sonde Voyager 1 e 2, lanciate nell'agosto e nel settembre 1977. Le sonde, dopo aver visitato Giove nel 1979 e aver scattato molte fotografie del pianeta e delle sue 4 lune galileiane, sono giunte in prossimità di Saturno nell'estate 1981, avendo compiuto un viaggio di circa 2,3 milioni di km. Purtroppo, un incidente di viaggio, dovuto, pare, a un urto contro uno dei frammenti che formano gli anelli del pianeta, ha danneggiato la strumentazione di una delle due sonde, in modo peraltro non irreparabile; la sonda ha poi proseguito verso Urano, donde potrebbe ancora fornire qualche informazione verso il 1986.
In conclusione, si può affermare che l'esplorazione del sistema solare mediante sonde automatiche continuerà negli anni futuri e costituirà - insieme ai voli orbitali dello Space Shuttle - uno dei cardini della politica spaziale americana. (Per maggiori dettagli, v. Buedeler, 1979, e Turnill, Spaceflight..., 1978).
6. Il volo umano nello spazio
a) Il pre-Apollo
Il volo spaziale degli apparecchi automatici, che abbiamo descritto finora, non era presente che in minima parte nelle intenzioni e nelle aspirazioni dei primi realizzatori. Inconsciamente o no, era in tutti l'idea del volo manned, cioè con esseri umani a bordo: dai progetti più ambiziosi, come quello dello sbarco sui pianeti più lontani, all'altro, poi realizzato, dell'esplorazione lunare, per finire a quello, che va prendendo sempre più consistenza, delle stazioni orbitanti.
Una volta stabilita, con il lancio dello Sputnik, la capacità dell'uomo di porre effettivamente in orbita terrestre un manufatto, le difficoltà che si frapponevano al volo umano risiedevano soprattutto in limitazioni di carattere psicofisico. Infatti, mentre il limite ‛astronomico' della Terra può stimarsi intorno ai 1.000-2.000 km, l'ambiente abitabile senza speciali accorgimenti si estende per pochi chilometri, a causa dell'estrema rarefazione dell'atmosfera e per l'effetto delle radiazioni esterne. Nel volo orbitale è poi di fondamentale importanza il ruolo dell'assenza di peso, per i tanti riflessi che essa ha sulle attività muscolari e cardiovascolari e sulla struttura dell'organismo umano. Si aggiungano a ciò le paure e gli altri disagi di ordine psicologico derivanti dalla permanenza nello spazio e si avrà un quadro delle difficoltà che si presentavano al tempo dei pionieri delle missioni spaziali umane e che, in parte, si presentano ancora.
Le ricerche in questo settore hanno dato luogo a una scienza che ha ormai contorni propri: la biologia spaziale. Ma già assai prima della seconda guerra mondiale, fin da quando Valier (v. cap. 2) propugnava l'uso del velivolo a razzo e si cominciava a pensare al rientro balistico, si era cominciato a studiare in laboratorio il problema del ‟quarto ambiente naturale dell'uomo" (secondo una felice definizione di L. Napolitano).
Fra le prime realizzazioni pratiche bisogna ricordare le imprese del prof. Picard, che effettuò, verso la fine degli anni trenta, un'ascensione in pallone fino a circa 16.000 m di quota. Ma ben presto seguirono missioni sempre più ambiziose e rischiose: nel 1939 avvenne il primo volo sperimentale di un aeroplano a razzo (l'Heinkel He-178) con pilota a bordo; nel 1947 il Bell X5-1 superò la velocità del suono; nel 1951 un pilota americano, a bordo di un razzo Skyrocket, raggiunse la quota di 24.000 m. E finalmente fu avviato il più celebre fra tutti i programmi pionieristici, non ancora spaziali: la costruzione dell'X15, destinato a volare a quote estremamente elevate (fino a 75.000 m) e a grandi velocità.
Si era pronti, a questo punto, per il grande passo, e nel 1958 la NASA (allora NACA) annunciò il suo nuovo programma spaziale umano: il Mercury. Non va dimenticato che l'epoca era quella di poco seguente il lancio dello Sputnik. Il programma prevedeva una prima fase, a carattere essenzialmente sperimentale, di volo suborbitale, da condurre per mezzo di razzi del tipo Redstone; mentre la fase finale avrebbe dovuto svolgersi in condizioni orbitali per mezzo del ben più potente Atlas.
Il problema principale era quello del disegno della capsula e delle sue parti: anzitutto il seggiolino dei piloti, che al lancio si sarebbero trovati a sopportare accelerazioni assai elevate, dell'ordine dei 10 g, sia pure per intervalli di tempo relativamente brevi; poi il sistema di protezione termica, fondamentale nelle fasi di rientro nell'atmosfera, durante il quale il riscaldamento cinetico fa raggiungere al rivestimento esterno temperature dell'ordine dei 1.700 gradi. Il primo problema fu risolto mediante l'introduzione di un seggiolino a sagoma speciale capace di assorbire le accelerazioni previste; il secondo per mezzo di un sistema ‛ablativo', ottenuto ricoprendo la capsula con una sostanza che assorbe il calore esterno sublimando (ossia passando direttamente dallo stato solido a quello gassoso).
Nel frattempo proseguivano gli esperimenti di medicina spaziale e la selezione dei candidati al volo suborbitale. Il primo lancio della capsula Mercury (senza equipaggio) avvenne nel settembre 1959; nel 1961 fu effettuato un lancio di prova con un essere vivente a bordo: uno scimpanzè di nome Ham. In quest'occasione il Mercury raggiunse i 253 km di quota su una gittata di 212 km. Al rientro, lo scimpanzè era vivo e vegeto, e anche di ottimo umore. Ormai si era pronti per il primo volo umano del Mercury e i tre astronauti prescelti (J. Glenn, V. Grissom e A. Shepard) furono trasferiti a Cape Canaveral, agli inizi del 1961, per le ultime prove fisiologiche, in attesa del grande evento.
Ma, ancora una volta, l'Unione Sovietica piazzò il primo colpo inaspettato, con un'impresa destinata a rimanere nella storia. Il 12 aprile 1961 - e sempre in coincidenza con un grande congresso scientifico (COSPAR, Firenze) - fu lanciato in volo orbitale Yuri Gagarin, a bordo della capsula Vostok (Oriente): la missione fu di una sola orbita di 181 × 237 km e durò in totale (comprese cioè le fasi di ascesa e di rientro) 1 ora e 28 minuti. È facile, naturalmente, immaginare la grande ripercussione che l'evento ebbe sull'opinione pubblica mondiale, con titoli di scatola sui giornali, servizi radiofonici e televisivi, dibattiti di ogni genere.
Finalmente, il 5 maggio 1961, potè aver luogo il primo volo del Mercury, con A. Shepard a bordo; si trattò di una traiettoria circa parabolica, con vertice a 187,5 km di quota su una distanza di 486 km, per una durata complessiva di 15 minuti. A bordo furono registrate accelerazioni fino a 11 g.
Si trattava quindi di un successo, ma meno importante di quello raggiunto da Gagarin. Fu in questa occasione che J. F. Kennedy lanciò la solenne promessa: ‟Prima della fine del decennio un americano sulla Luna e poi sano e salvo a Terra".
Il duello a distanza continuava. Il secondo lancio Mercury stava per finire in tragedia (Grissom, allo splashdown nel Pacifico per poco non annegò), quando l'Unione Sovietica nell'agosto 1967 inviò nello spazio H. Titov; stavolta per un volo di 17 orbite, per una durata complessiva di 24 ore. Come al solito i sovietici fornirono scarsi dettagli tecnici sulla capsula e solo alcuni anni più tardi: si trattava di una semplice sfera, nella configurazione di rientro, con un sistema di protezione termica probabilmente ancora di tipo ablativo.
La reazione statunitense fu ovviamente un'accelerazione del programma Mercury, che finalmente raggiunse la fase di volo orbitale, con J. Glenn, che, nel febbraio 1962, compì tre orbite terrestri di 161 × 261 km; lo splashdown avvenne però a notevole distanza dal punto previsto (forse a causa della scarsa conoscenza delle caratteristiche atmosferiche). Un imponente servizio aeronavale di sicurezza era stato predisposto per evitare il ripetersi degli inconvenienti lamentati da Grissom. Il secondo volo, sempre di tre orbite, fu compiuto da S. Carpenter nel maggio dello stesso anno.
Gli Stati Uniti sembravano dunque essersi rimessi in corsa, quando ecco il nuovo exploit sovietico, con il doppio lancio dell'agosto 1962: la Vostok 3 con A. Nikolayev, seguito a un giorno di distanza da P. Popovic sulla Vostok 4.
Le due astronavi si rincorsero nello spazio secondo un programma preordinato, giungendo, a varie riprese, a pochi chilometri di distanza l'una dall'altra: chiaro segno che si stava affinando la tecnica di rendez-vous. Anche l'atterraggio fu quasi sincrono; il volo costituì un ennesimo spettacolare successo spaziale sovietico.
Il progetto Mercury prevedeva quattro missioni orbitali, e, a questo punto, non ne rimanevano che due, agli Stati Uniti, per migliorare la loro tecnologia e le loro conoscenze psicofisiche. Da questo punto di vista furono estremamente utili le missioni di W. Schirra e di G. Cooper. Quest'ultimo asserì, sorvolando il Tibet, di poter osservare le case e il fumo dei camini! Verso la fine del volo, Cooper fece distaccare dall'astronave una piccola capsula dotata di un segnale luminoso, che poi inseguì nello spazio; anche questa manovra, per quanto modesta, era ovviamente predisposta in vista delle future tecniche di rendez-vous, a loro volta premessa indispensabile all'attuazione delle missioni lunari.
A questo punto si chiudeva la prima fase del duello spaziale fra Stati Uniti e Unione Sovietica, con i sovietici innegabilmente in vantaggio. Si passava quindi alla seconda fase, centrata, da parte americana, sul programma Gemini e, da parte sovietica, sul Voskhod. Intanto i sovietici completavano il programma Vostok. Nel giugno 1963 veniva lanciata in orbita la Vostok 5 con a bordo V. Bikovsky, che, come primo risultato, avrebbe stabilito un record, rimasto a lungo imbattuto, di permanenza nello spazio: 119 ore! Ma ancora più emozionante fu il lancio della Vostok 6, che seguì a un giorno di distanza, e che recava a bordo la prima - e per ora - unica donna astronauta: V. Tereskova, che restò in orbita per 77 ore e atterrò tre ore prima di Bikovsky. Al di là dei propositi propagandistici, il lancio della Tereskova aveva certamente lo scopo di mostrare le possibilità di vita della donna nello spazio - o almeno in orbita -, con importanti conseguenze sulle prospettive di popolamento delle future stazioni spaziali.
I sovietici segnarono un altro punto a loro favore con le imprese del nuovo programma Voskhod. Cominciò nel 1964, con il lancio della prima capsula con tre astronauti a bordo, seguita dalla Voskhod 2, nel marzo 1965, con i due piloti P. Beliarev e A. Leonov. Fu questi il primo cosmonauta a effettuare la ‛passeggiata spaziale', della durata di circa 10 minuti, durante i quali uscì dalla capsula e, mantenendosi - ovviamente - saldamente legato alla capsula stessa per mezzo di una fune speciale, e indossando una apposita tuta, rimase a diretto contatto con l'ambiente spaziale (circa 40 assoluti!). L'avvenimento, per quanto non eccezionale dal punto di vista scientifico, suscitò forte emozione, contribuendo ad alimentare l'alta considerazione in cui era tenuta l'astronautica sovietica.
Intanto stava decollando il progetto Gemini. La denominazione derivava dalle caratteristiche del progetto stesso, che prevedeva una capsula con due piloti a bordo, assai più grande e più pesante della Mercury, destinata soprattutto all'acquisizione delle tecniche di rendez-v0us. Questo doveva avvenire tramite l'aggancio dell'astronave all'ultimo stadio (l'Agena) del razzo di lancio Atlas-Agena, appositamente messo in orbita; si era anche pensato, inizialmente, alla creazione di una gravità artificiale, ottenibile facendo ruotare la capsula su se stessa (con la forza centrifuga in funzione di peso apparente), ma questo progetto fu poi abbandonato. Comunque, il Gemini rappresentò un vero trionfo degli Stati Uniti, che, partiti in ritardo, nel giro di due anni presero nettamente la testa nella ‛gara spaziale'. Ricordiamo alcune fasi: nel primo volo, avvenuto solo cinque giorni dopo l'impresa di Leonov, furono collaudati i sistemi di controllo computerizzato durante tre orbite; dalla Gemini 4, giugno 1965, E. White compì la prima passeggiata spaziale statunitense; nella Gemini 7 F. Borman e J. Lovell, con un volo di 330 ore, frantumarono il record di durata appartenente a G. Cooper e C. Conrad, della Gemini 5, che lo avevano già strappato al sovietico della Vostok 5; nello stesso volo fu collaudata con successo la tecnica di rendez-vous con un'altra astronave pilotata da W. Schirra e T. Stafford. E poi, altre passeggiate e altri rendez-vous, fino alla vera e propria manovra di aggancio (docking), effettuata nel 1966 da Armstrong e Scott; manovra che lasciò col fiato sospeso a causa di vibrazioni prodottesi al momento dell'aggancio stesso.
Quando il programma Gemini terminò, nel novembre 1966, la tecnologia spaziale statunitense era pronta per le missioni lunari. Invece, per tutta la durata del Gemini, i sovietici non avevano inviato nessun uomo nello spazio.
b) Il progetto Apollo
Nella sfida e nell'impegno che J. F. Kennedy prese davanti al Congresso nel maggio 1961, e di cui abbiamo già parlato, non mancò, probabilmente, la componente emotiva, derivante dal grave ritardo che gli Stati Uniti mostravano di avere, nella corsa spaziale, rispetto all'Unione Sovietica. Ma già da parecchi anni erano iniziati in America gli studi e i preparativi per missioni umane sulla Luna ed oltre. I primi piani prevedevano un programma di circumnavigazione lunare, seguita da una fase di sbarco vero e proprio (come infatti avvenne). Nel 1960 al progetto, che ormai cominciava ad assumere contorni definiti, fu dato il nome di Apollo. Il primo studio della NASA (Concepts for Apollo) era in realtà uno studio di fattibilità, e si rifaceva alla celebre pubblicazione di H. Oberth Die Rakete zu den Planetenräumen (v. cap. 2) e ai lavori di von Braun.
Ovviamente, il primo punto da decidere riguardava il tipo di missione e il propulsore necessario per effettuarla. I razzi disponibili, o in via di sviluppo, apparvero del tutto insufficienti, per l'imponenza della spinta necessaria, e fu quindi dato mandato a von Braun e ai suoi quasi 7.500 specialisti (in gran parte tedeschi) di Huntsville, di realizzare il vettore dalle caratteristiche desiderate. Compito certamente tremendo.
Furono presi in considerazione tre tipi di missione: il primo prevedeva un lancio diretto verso la Luna, con ‛allunaggio' morbido e ritorno dalla superficie del satellite sempre con lancio diretto. Fatti i conti, si vide che questo processo sarebbe stato estremamente dispendioso dal punto di vista energetico; tuttavia furono effettuati studi di fattibilità per il razzo relativo, il Nova, che però non fu mai realizzato. Un secondo progetto prevedeva la costruzione di due razzi, delle dimensioni del Saturno, uno dei quali avrebbe portato in orbita terrestre di parcheggio il carico pagante e l'altro il modulo di servizio; dopo l'aggancio in orbita terrestre, il nuovo veicolo sarebbe partito alla volta della Luna. Fu finalmente prescelta la terza soluzione, che descriveremo più in dettaglio in seguito, e la cui missione consisteva in: a) lancio in orbita di parcheggio terrestre; b) separazione e lancio verso la Luna; c) inserimento in orbita lunare; d) separazione del modulo orbitante da quello di discesa; e) discesa sulla Luna; f) viaggio di ritorno pressappoco inverso.
Ma, come abbiamo detto, rimaneva il problema principale, quello della costruzione e della messa a punto del vettore. È impossibile seguire in questa sede lo sviluppo della tecnologia del razzo.
La prima serie, di dieci esemplari, si chiamò Saturno I e aveva una spinta di circa 500 t; i primi esemplari erano monostadi (kerosene + ossigeno), negli ultimi fu aggiunto un secondo stadio (ossigeno liquido + idrogeno liquido). Questa prima serie durò dal 1961 al 1965, seguita dalla serie Saturno I-B, con spinta maggiorata (680 ÷ 725 t), che durò, con nove lanci, tutti coronati da successo, fino al 1968.
Il quinto lancio fu pure il primo con equipaggio umano. Si era finalmente pronti per la versione finale, il Saturno V; il gigantesco razzo aveva cinque motori (ossigeno liquido + kerosene), ciascuno capace di sviluppare una spinta uguale a quella prodotta complessivamente da tutti e otto i motori del Saturno I-B, per un valore totale di 3.400 t; il peso al decollo (carico pagante compreso), era di circa 2.900 t. Una sommaria descrizione del veicolo è riportata nella fig. 63: si noti l'enorme altezza (~ 110 m) e il diametro (circa 10 m primo e secondo stadio, 6,60 m terzo stadio).
Vale forse la pena di fornire alcuni dettagli tecnici sui singoli stadi. Il primo (Boeing Co.) consuma kerosene e ossigeno liquido all'impressionante portata di 12.000 l/s e porta il veicolo a 8.500 km/h a 61 km. Gravi problemi strutturali furono brillantemente risolti dall'équipe di von Braun per ridurre il peso; uno dei cinque motori, quello centrale, è rigidamente connesso al razzo, mentre i quattro laterali sono dotati di sospensione cardanica, che consente il controllo d'assetto del razzo. Il secondo stadio (Rockwell mt.), pure a cinque motori (colla stessa formula del precedente), ha una spinta di 530 t e porta il veicolo a 24.000 km/h a 180 km di quota. Il terzo stadio (a ossigeno e idrogeno liquidi) ha un solo motore, cardanico, con una spinta massima di 10 t. Ha due compiti: subito dopo la separazione del secondo stadio, fornisce al veicolo l'incremento di velocità necessario (4.000 km/h) per fargli raggiungere la velocità (28.000 km/h) di inserimento nell'orbita di parcheggio; durante un'orbita successiva (in genere la seconda), il motore viene riacceso, per far raggiungere al veicolo la ‛seconda velocità cosmica' (39.000 km/h), necessaria per lasciare il campo gravitazionale terrestre.
Vediamo ora come è costituito il carico utile, che si trova in testa al vettore (v. fig. 64). Ha un'altezza totale di 25 m (leggermente diversa nelle versioni Skylab, di cui parleremo in seguito) e comprende le seguenti parti: 1) sistema di sicurezza al lancio; 2) modulo di comando; 3) modulo di servizio; 4) modulo lunare; 5) adattatore. Descriviamole singolarmente.
Il sistema di sicurezza è, in sostanza, un elemento catapultabile che, in caso di pericolo al lancio, si stacca dal resto del veicolo e, sostenuto da un paracadute, porta a terra l'equipaggio.
Il modulo di comando è l'abitacolo dei tre piloti, uno dei quali non lo lascia mai durante tutta la missione, mentre gli altri due lo lasciano solo per la parte di missione che si svolge sulla Luna. Ha forma conica, con sezione pressoché equilatera ed è lungo circa 3 m. L'interno del modulo (che è poi l'unica parte del veicolo a tornare a Terra) è un intrico di cavi, di apparecchi di misura, di comandi. Particolare cura è posta nella messa a punto del sistema di controllo della temperatura (20 ÷ 25 °C) e dell'ambiente (specialmente in seguito alla catastrofe del 1967, di cui parleremo più tardi). Molto importante è anche il sistema di protezione termica al rientro (realizzato con il processo dell'ablazione, con strati di resina spessi fino a 7 cm). Vi sono poi motori ausiliari di controllo per la fase di rientro a Terra.
Il modulo di servizio è costituito da una struttura cilindrica (7 m) e contiene il sistema principale di propulsione del veicolo spaziale, con una spinta di circa 9 t; il modulo di servizio viene abbandonato durante la fase di rientro. In esso si trovano anche gli strumenti scientifici. All'inizio del volo lunare, il sistema modulo di comando + modulo di servizio si stacca dal modulo lunare, gli gira intorno e gli si riaggancia, in modo da poter poi consentire il passaggio di due astronauti nel modulo lunare stesso. Manovra inversa si ha naturalmente all'inizio della traiettoria di rientro.
Il modulo lunare è un veicolo costituito da due diverse parti separate. La sua funzione è quella di trasportare due degli astronauti dall'orbita lunare verso la superficie del satellite terrestre e viceversa, oltre a costituire la base operativa durante la permanenza sulla superficie lunare. La prima delle due parti, il modulo di discesa, è anche quella che poi serve da piattaforma per il lancio di ritorno e ha una spinta variabile tra i 680 e i 4.500 kg.; questa variabilità è necessaria per consentire la modulazione richiesta dal controllo della traiettoria del veicolo, specie durante la fase di touchdown (allunaggio). Notevolmente complicata è la manovra di fuoriuscita della piattaforma di lancio.
Il modulo di risalita è quello occupato dagli astronauti e possiede due aperture: una che serve durante la fase di rendez-vous in orbita lunare e un'altra da cui si esce all'aperto, una volta giunti sulla superficie lunare, muovendosi carponi in direzione retrograda. Naturalmente anche questo modulo ha organi di propulsione propri (1.517 kg di spinta), che servono per riportare l'equipaggio al modulo orbitante.
L'adattatore (adapter), infine, ha solo funzione di raccordo aerodinamico tra veicolo spaziale e lanciatore e contiene il modulo lunare.
La storia del programma Apollo, nella sua fase operativa, ebbe inizio, si può dire, nel 1964, col primo volo del Saturno I, che mise in orbita il primo modulo di comando. Intanto proseguiva a ritmo serrato l'addestramento dei futuri astronauti a Cape Kennedy (così era stato ribattezzato, temporaneamente, il celetre poligono di Cape Canaveral). E qui si ebbe anche un tragico evento: il 27 gennaio 1967 White, Grissom e Chaffee, mentre si trovavano nella cabina di simulazione dell'impianto di prova, morirono carbonizzati in un incendio dovuto probabilmente a un corto circuito e alimentato dall'atmosfera della cabina stessa, costituita da ossigeno puro. Questo fu anzi il motivo per cui, nelle versioni successive, l'atmosfera di ossigeno fu sostituita da una miscela, meno infiammabile, di ossigeno e azoto.
Questo tragico incidente colpì l'opinione pubblica e ritardò il programma di 18 mesi, a causa delle polemiche e delle inchieste che seguirono. Comunque, nell'ottobre 1968, si ebbe il primo volo umano dell'Apollo in orbita terrestre (Saturno I) - prova generale delle successive missioni lunari -, in cui furono provati con successo i meccanismi di docking e le manovre relative tra le varie parti dell'astronave: si ebbero anche polemiche tra il centro di controllo e i membri dell'equipaggio, infastiditi dalle troppe riprese televisive effettuate da Terra, al punto che il veterano W. Schirra, al ritorno, si dimise dalla NASA.
L'ottava missione costituì il primo volo umano intorno alla Luna (Saturno V); furono provate le complesse manovre di inserimento e disinserimento dall'orbita lunare, tutte perfettamente riuscite (la missione ebbe luogo durante le festività natalizie), e furono prese, durante le 20 ore di permanenza in orbita lunare, numerose fotografie che sarebbero poi state di grande aiuto nella missione finale.
Ulteriori prove furono effettuate nelle missioni 9 (terrestre) e 10 (lunare): tutte confermarono l'ottimo stato del veicolo e l'addestramento degli astronauti.
Si giunse così al 16 luglio 1969, data d'inizio della missione destinata al vero e proprio sbarco sulla Luna, con gli astronauti N. Armstrong, E. Aldrin e M. Collins. Seguia mone il volo sulla carta riportata nella fig. 65. Dopo la partenza (1), si ebbe la separazione del primo stadio (2), quella del secondo (3) e quella del terzo (4). Si raggiunse così l'orbita di parcheggio, percorsa per due volte (5) e poi abbandonata per l'inserimento nell'orbita di trasferimento Terra-Luna (6) (che subì una correzione, prevista, verso la fine della traiettoria: mid course correction); il 19 luglio, avvenne l'inserimento (7) nell'orbita lunare, di 100 × 121 km (successivamente l'orbita fu circolarizzata a causa delle forti influenze del campo gravitazionale lunare). Il 20 luglio si ebbe la separazione tra modulo di comando e modulo lunare (8). Aldrin e Armstrong scesero sulla Luna, mentre Collins restava nel modulo orbitante. Finalmente, il 20 luglio 1969 alle 21,17 (ora dell'Europa centrale), il modulo lunare raggiungeva la superficie della Luna nel Mare Tranquillitatis. Armstrong annunciò al centro di controllo di Houston: ‟L'Aquila è atterrata!".
A questo momento di grande emozione seguì quello dell'uscita dalla capsula, che avvenne con la necessaria grande cautela. I due astronauti effettuarono una passeggiata lunare della durata di 2 ore e 1/4; piantarono la bandiera americana (retta da un telaio, a causa dell'assenza di vento) e deposero una piastra commemorativa; fecero esercizi di moto e salti per verificare gli effetti della ridotta gravità lunare; raccolsero circa 22 kg di pietre lunari, per il successivo esame nei laboratori a Terra (una parte fu inviata anche in Italia); lasciarono strumentazioni scientifiche, destinate a registrare gli eventi fisici sul satellite (come i terremoti), da raccogliere nelle missioni successive.
Il volo di ritorno non presentò difficoltà: solo le solite vibrazioni all'aggancio (10), tre ore e mezzo dopo il decollo (9), destarono qualche preoccupazione. Si ebbe poi il ritorno dei due astronauti nel modulo di comando (11); la separazione e l'abbandono del modulo lunare, l'inserimento nella traiettoria di ritorno (12), la mid course correction, la separazione e l'abbandono del modulo di servizio (13). Ancora una volta il mondo trattenne il fiato durante il rientro; era già stato constatato che gli strati alti dell'atmosfera, altamente ionizzati a causa delle complesse trasformazioni di carattere fluidodinamico nelle zone caldissime del ‛naso' della capsula, impedivano le comunicazioni radio: ci fu circa 1 minuto di blackout. Finalmente si ebbe lo splashdown il 24 luglio, con solo 30 secondi di errore sull'istante previsto. Fu disposto di isolare gli astronauti per eventuali possibili contaminazioni, precauzione poi rivelatasi inutile.
La missione successiva, Apollo 12, del novembre 1969, non ebbe caratteristiche molto diverse; solo la durata della permanenza sulla Luna fu assai maggiore (31 ore, con due ‛passeggiate' per complessive 7 ore e 1/2). Invece la missione 13 fu drammatica, a causa dell'esplosione di un serbatoio di ossigeno quando ormai il veicolo era in vicinanza della Luna. Fu necessario rinunciare allo sbarco e si dovette ‛inventare' una traiettoria di ritorno.
Il programma fu completato da altri quattro voli; ormai si trattava di routine, tanta era la sicurezza dei lanci, del volo, delle manovre. Le missioni fino alla 14 furono definite dalla stessa NASA ‛missioni tecniche'; la 15, la 16 e la 17 furono, invece, ‛scientifiche', nel senso che non si trattava di affinare i dettagli del volo, ma solo di fare osservazioni e raccogliere dati. Va ricordata peraltro la missione 15, in cui fece la sua comparsa il Lunar Rover (v. tav. III), veicolo destinato al trasporto di materiali, di antenne televisive, degli stessi astronauti.
Il Rover, che pesava 209 kg ed era mosso da batterie con una autonomia complessiva di 92 km, poteva portare fino a 400 kg. Non va dimenticato che in ambiente lunare il peso è circa 1/6 di quello terrestre, mentre la resistenza dei materiali resta invariata; quindi l'effetto dell'ambiente lunare era tale da accrescere le prestazioni del veicolo, che poteva raggiungere, con i due astronauti a bordo, i 17 km/h, anche sull'accidentatissima superficie lunare. Comunque il raggio massimo di escursione del Rover fu limitato a circa 10 km dal punto di sbarco, allo scopo di evitare problemi agli astronauti in caso di cattivo funzionamento del veicolo.
Nel dicembre 1972, con il volo Apollo 17, il programma era concluso.
Così, solo quindici anni dopo il lancio dello Sputnik, l'attività spaziale aveva documentato la sua grande capacità di progresso. Il bilancio del progetto Apollo fu certamente assai importante dal punto di vista scientifico. Le pietre lunari (385 kg complessivamente) trasportate a Terra e successivamente esaminate fornirono (e ancora forniscono) preziose informazioni sulla chimica e sulla geologia del satellite, e sulla formazione e lo sviluppo del sistema solare; gli strumenti sismografici lasciati dagli astronauti hanno permesso di raccogliere dati relativi a più di 10.000 terremoti e 2.000 impatti di meteoriti sulla Luna; va a questo proposito ricordato che impatti di questo tipo danno luogo a intense vibrazioni della superficie lunare, sulla cui natura ancora non si hanno idee molto chiare. La raccolta dei dati è durata fino al 1977, anno in cui fu decisa la chiusura delle stazioni di osservazione a Terra, per motivi economici.
c) Il post-Apollo
Mentre negli Stati Uniti veniva portato avanti il progetto Apollo, i sovietici svilupparono un loro nuovo programma, che non è, almeno nominalmente, ancora terminato, anche se i nuovi e più recenti sviluppi si sono notevolmente allontanati dagli scopi iniziali.
A questo nuovo programma fu dato il nome di Soyuz (‛unione'). Il suo scopo era (ed è) quello di sviluppare il volo spaziale, le manovre orbitali e di aggancio, e le ricerche tecnologiche e scientifiche in ambiente orbitale terrestre.
I veicoli Soyuz sono costituiti da tre sezioni: il modulo di rientro, al centro dell'astronave, con il modulo orbitale da un lato e il modulo strumentale dall'altro. Questi ultimi due vengono sganciati e abbandonati durante il rientro.
Il modulo di rientro - che è occupato dagli astronauti anche durante la fase di ascesa in orbita - ha forma di paraboloide tronco ed è studiato in modo da fornire una certa portanza durante il rientro.
La portanza è quella forza di natura aerodinamica, normale alla traiettoria, che sostiene anche un comune aeroplano (v. fig. 66); essa consente quindi un rientro non ‛balistico' (come quello dei primi Vostok e Voshkod, in cui si raggiungevano accelerazioni dell'ordine di 8 ÷ 10 g; con il rientro non balistico si arriva a 4 ÷ 5 g). Si ha peraltro un più elevato riscaldamento, a causa della maggiore permanenza nell'atmosfera, per cui il sistema di protezione termica necessita di maggiore attenzione.
A parte i sistemi comuni a tutte le capsule abitate, le Soyuz (almeno le prime) non dispongono di impianti di rigenerazione dell'acqua, che è contenuta in appositi serbatoi. L'atterraggio viene rallentato dall'apertura di un paracadute a 8.000 m di quota, seguita da accensione di retrorazzi in vicinanza del suolo, per cui la velocità verticale al touchdown non supera i 3 m/s.
Il modulo orbitale ha un volume complessivo di 6 m3, sufficiente per consentire agli astronauti le normali attività lavorative in posizione eretta. Un complesso sistema di aperture conduce al modulo di rientro e all'esterno della navetta.
Il modulo di servizio contiene tutta la strumentazione, i sistemi di controllo e di telemetria; vi sono due motori a liquido, ciascuno da 400 kg, che sono impiegati per manovre orbitali fino a 1.300 km (la massima quota delle Soyuz) e per frenare l'astronave al rientro; mentre un motore più piccolo è usato per il controllo di assetto. Anche qui esiste un sistema di sicurezza al decollo.
Il lancio della prima Soyuz avvenne il 23 marzo 1967, dopo due anni di assenza degli astronauti sovietici dallo spazio; tutti si aspettavano qualche nuovo evento a sensazione quando invece fu dato all'astronauta Komarov l'ordine di rientrare, dopo sole 18 orbite. Il paracadute di atterraggio, alla quota di circa 7 km, si impigliò nell'astronave, che si schiantò al suolo. Fu in seguito rivelato che l'astronauta era soggetto a disturbi cardiaci, anche se sembra da escludersi che questa circostanza sia in qualche modo collegata con il disastro.
Nella seconda missione, le Soyuz 2 e 3, lanciate nell'ottobre 1968, effettuarono orbite e atterraggi indipendenti, e due rendez-vous in orbita (a circa cento metri di distanza), uno senza aggancio. Il primo docking vero e proprio fu compiuto nel lancio successivo, del gennaio 1969: la Soyuz 4, con il solo astronauta Shatalov fu raggiunta dalla 5 con Volinov, Chrunov, Eliseev, che effettuarono un aggancio con controllo manuale, accoppiando meccanicamente ed elettricamente le due navicelle, che risultarono quindi alimentate dalla stessa fonte di energia. Vi fu anche una passeggiata spaziale di Eliseev e Chrunov.
Alla missione successiva parteciparono le Soyuz 6, 7 e 8, che furono impiegate in complesse manovre di aggancio. Seguì la missione Soyuz 9. Una novità si ebbe con il volo della Soyuz 10 (aprile 1971), in cui fu tentato l'aggancio con la prima stazione spaziale, Salyut 1, lanciata tre giorni prima; l'aggancio durò 5 ore e mezzo, ma gli astronauti non entrarono nella stazione, ciò che fu fonte di varie congetture da parte di osservatori occidentali.
La missione Soyuz 11 (gennaio 1971) finì in un disastro. Tutto andò bene al lancio e per i 23 giorni durante i quali i tre membri dell'equipaggio (Dobrovolsky, Volkov, Datrayev) lavorarono nella stazione Salyut 1; anche il rientro non presentò, apparentemente, problemi e l'atterraggio avvenne regolarmente, ma, all'apertura del portello della capsula, i tre astronauti furono trovati morti. Le cause della disgrazia non furono mai accertate; gli occidentali avanzarono l'ipotesi che si fosse trattato degli effetti della prolungata permanenza in orbita in condizioni di assenza di peso (circostanza poi smentita dalle successive imprese spaziali); invece i sovietici diffusero la notizia che tutto era dovuto a una rapida depressurizzazione della cabina, seguita a una avaria al sistema di tenuta.
Da allora, come si è detto, il programma Soyuz, pur registrando alcuni insuccessi tecnologici, è continuato, con scopi soprattutto scientifici. Comunque l'obiettivo iniziale, ossia l'affinamento delle procedure di aggancio, ha ceduto il passo man mano che la tecnologia spaziale si perfezionava alla ricerca di risultati scientifici di rilievo.
Questo cambiamento di indirizzo è avvenuto in concomitanza con la costruzione e il lancio delle stazioni automatiche del tipo Salyut, cui si è già accennato. Le Salyut hanno una lunghissima vita orbitale e quindi consentono la realizzazione di varie missioni spaziali consecutive. Ci limitiamo a ricordare le più importanti.
La Soyuz 17 rappresentò un grande successo, sia per la precisione del lancio e delle manovre, sia per il compimento del primo esperimento di recupero, sotto forma liquida, fino al valore di 1 litro al giorno per uomo, del vapore acqueo derivante dalla traspirazione. La Soyuz successiva fu una delle pochissime in cui fu usato il seggiolino eiettabile di sicurezza, per un cattivo funzionamento al lancio; un particolare curioso fu che i due astronauti (Lazarev e Makarov), durante le fasi di emergenza, chiesero al centro di controllo l'esplicita assicurazione che non sarebbero atterrati in Cina (a causa delle cattive relazioni tra i due paesi). La missione fu in seguito designata Soyuz 00. Nella Soyuz 18 furono anche effettuati esperimenti con scarafaggi (!), allo scopo di accertare se la loro grande facilità di riproduzione si manteneva anche in condizioni prolungate di assenza di peso. La Soyuz 23, del 1973, fu costretta a un precipitoso ritorno a Terra, a causa di un difettoso funzionamento dei sistemi elettronici.
Le versioni successive, pur senza far registrare eventi degni di nota, hanno raccolto e continuano a raccogliere una massa continua di risultati scientifici, che fanno del Soyuz un programma estremamente valido.
Recenti sviluppi hanno avuto, in particolare, le ricerche relative alla crescita delle piante nello spazio, che risulta alterata per una difficoltà di imbibizione delle radici, a causa del diverso meccanismo di diffusione dell'acqua entro mezzi porosi, derivante dall'assenza di gravità. Altre attività riguardano studi di gravitometria, oceanografia, geodinamica, magnetismo; ma lo scopo finale resta, probabilmente, sempre la realizzazione di grandi stazioni spaziali.
Il post-Apollo non trovò impreparati gli Stati Uniti, che già negli anni sessanta avevano pensato all'utilizzazione di ‛residuati' del grande progetto lunare. Il primo programma realizzato è stato lo ‛Skylab', inizialmente noto sotto la denominazione di ‛Apollo applications'. Si trattava di costruire una stazione spaziale tipo Salyut, destinata a ospitare in successione vari equipaggi specializzati. Il modo di realizzazione dette luogo a varie discussioni: si era pensato inizialmente di utilizzare i serbatoi di propellente - vuoti - del Saturno V, una volta che essi avessero esaurito la loro funzione. Ma poi prevalse l'idea di costruire e lanciare una vera e propria stazione spaziale, che, nel maggio1973, fu messa in orbita circolare a 435 km di quota, per mezzo di un Saturno V. Il lancio fu caratterizzato da notevoli difficoltà: si ebbero fortissime vibrazioni al decollo, che causarono avarie ai sistemi di protezione termica e anti-meteoriti e che misero fuori uso uno dei pannelli solari. A questo punto lo Skylab sembrava inabitabile e, come prima misura, fu deciso di posporre di 5 giorni il lancio del primo equipaggio; poi, orientando opportunamente il veicolo (con i sistemi di controllo da Terra), si riuscì a limitare l'aumento di temperatura (che aveva intanto raggiunto i 1000 all'interno della stazione). Infine fu dato agli astroflauti il compito di provvedere in orbita alle riparazioni necessarie.
Così, finalmente, il 25 maggio 1973 furono messi in orbita, con un Saturno I-B, tre astronauti: P. Conrad, comandante, J. Kerwin (lo scienziato di bordo) e P. Mertz. Ci vollero vari giorni per riparare il pannello di protezione solare, lavorando all'interno e all'esterno dell'astronave, e altri ce ne vollero per liberare il pannello solare dai frammenti del sistema di protezione termica. Durante tutte queste manovre, ovviamente, i due astronauti rimasero in contatto con il centro di controllo. Finalmente ebbe inizio la vera e propria missione, che durò, complessivamente, 28 giorni; fu così battuto il record di durata precedente (23 giorni), appartenente agli sfortunati astronauti della Soyuz 11.
Gli astronauti della missione Skylab 2 (così chiamata perché fu considerata come Skylab 1 la messa in orbita della stazione), nonostante le difficoltà tecniche viste, riuscirono a compiere l'80% degli esperimenti previsti (osservazioni del Sole, per un totale di 81 ore, varie misurazioni scientifiche, ecc.), compresi quelli, di gran lunga più importanti, riguardanti l'adattabilità a zero g.
Anche la successiva missione, Skylab 3, fu caratterizzata da difficoltà di ordine tecnico, relative al sistema di protezione termica, che fu ancora una volta riparato dall'equipaggio. La missione durò 52 giorni, durante i quali, oltre ai soliti esperimenti, furono fatte prove riguardanti i processi di saldatura e di crescita di cristalli, sorprendentemente facilitati in condizioni di zero g.
Tra le prove fisiologiche condotte, va ricordata quella effettuata su due ragni (Anita e Arabella, la prima morta durante la missione, la seconda al rientro), i quali si dimostrarono in grado di tessere la tela anche a zero g.
La terza e ultima missione, Skylab 4, del novembre 1973, durò complessivamente 84 giorni; tra i suoi risultati più importanti vi è l'osservazione di comete in condizioni straordinariamente favorevoli. L'8 febbraio 1974 l'equipaggio depressurizzava lo Skylab (ormai divenuto un ‛relitto spaziale', dopo una vita totale di quasi 4.000 orbite e con ancora 6 ÷ 10 anni possibili di permanenza in orbita) e rientrava.
Oltre alla grandissima importanza dei risultati scientifici, vale la pena di ricordare l'intervista rilasciata da uno dei componenti dell'ultima missione, il colonnello Pogue, relativa alla vita prolungata nello spazio. ‟Durante i primi giorni, a causa dello spostamento dei liquidi interni del corpo, la faccia si gonfia, dando agli europei un aspetto orientale. Si hanno difficoltà di respirazione e congestioni auricolari per le prime 12 settimane. Vi sono poi alterazioni nella produzione di globuli rossi, alterazioni che scompaiono dopo circa 9 settimane. Sono inevitabili versamenti involontari di urina. Immaginabili le difficoltà dovute all'assenza di peso, con gli oggetti più disparati (compresi i contenitori di rifiuti) che volano nella cabina. I pasti vanno appositamente studiati perché devono contenere una quantità ottimale di minerali; ma la dieta adottata non basta a saziare gli astronauti. Altri problemi sono connessi con l'igiene personale (anche radersi richiede più tempo che a Terra); invece le piccole ferite si rimarginano presto.
Dal punto di vista emotivo si ha un notevole grado di irritabilità, provocata dalle difficili condizioni in cui si opera. Ogni piccolo inconveniente è amplificato e desta non poche preoccupazioni. Con l'andare del tempo si ha sempre più bisogno di svaghi e di riposo e uno dei passatempi preferiti sembra l'osservazione dell'esterno dell'astronave".
Fra le attività post-Apollo non va dimenticata la missione congiunta Soyuz-Apollo, avvenuta in un periodo di stasi, in vista di nuovi sviluppi, dei programmi spaziali delle due superpotenze. Le trattative furono iniziate nel 1969 e prevedevano inizialmente una generica ‛collaborazione spaziale'; naturali diffidenze e difficoltà politiche ritardarono l'approvazione dell'accordo, che fu firmato a Mosca il 24 maggio 1972 da Nixon e Kossygin.
Anche durante la preparazione della missione furono lamentate - soprattutto da parte americana - incomprensioni e reticenze; per esempio, a un gruppo di astronauti americani furono fatte varie difficoltà durante la loro visita al poligono di Baikonur. Sorsero poi difficoltà tecniche, derivanti dalle differenze nel materiale di volo. Finalmente, il 15 luglio 1975 alle 12,20, partì, come previsto, da Baikonur, la Soyuz 19, con Leonov e Komarov. Dopo sette ore e mezzo, da Cape Canaveral veniva lanciato il Saturno I-B con una capsula a bordo della quale erano Stafford, Slayton e Brand. Questi tre astronauti avevano imparato il russo e quelli sovietici parlavano inglese. L'incontro nello spazio e l'aggancio avvennero il 17 luglio, in un'orbita a 226 km di quota. Dopo tre ore, tempo richiesto per completare i preparativi tecnici necessari, furono aperti i portelli delle due astronavi saldamente agganciate: Leonov e Stafford si strinsero la mano in un caloroso saluto, dopodiché i due equipaggi si scambiarono visite reciproche.
L'aggancio durò due giorni, durante i quali i due equipaggi fecero esperimenti in comune e tennero insieme una conferenza stampa. Poi il rientro, immediato e semplice per i sovietici, ritardato di tre giorni (per l'effettuazione di ulteriori esperienze) e caratterizzato da difficoltà tecniche per gli americani. Per gli americani, questo fu anche l'ultimo volo con un razzo balistico.
d) Lo Shuttle
Il programma Apollo, portato a termine dopo appena quindici anni dall'inizio dell'era spaziale, rappresentò la realizzazione di un sogno che durava dai primordi dell'umanità. Sembrava che le porte del cosmo fossero ormai spalancate all'uomo e che nulla ostasse al raggiungimento dei pianeti più lontani. Ma tutto questo era vero solo dal punto di vista strettamente tecnologico: ben presto altre considerazioni si fecero strada. L'Apollo era costato una cifra pari alla metà del reddito nazionale annuo di uno Stato come l'Italia; i risultati erano stati sì importanti, dal punto di vista scientifico, ma la gente non lo capiva e pensava che potessero esserci altri motivi all'origine della sfida, o gara, spaziale fra le due superpotenze. Avvenne, delle conquiste spaziali, un po' quello che era avvenuto degli insediamenti vichinghi sulle coste dell'America del Nord: il mondo di allora ne era probabilmente a conoscenza, ma non era pronto per utilizzarne i risultati e quella conquista andò praticamente perduta. La colonizzazione dell'America fu ripresa dopo qualche secolo, e così sarà, forse, per l'attività spaziale extraorbitale: forse un giorno l'uomo si porrà ancora il traguardo di sbarcare sui pianeti più lontani.
Fra la fine degli anni sessanta e l'inizio degli anni settanta, scoppiò, su scala mondiale, la crisi dell'energia; i grossi problemi economici che ne derivarono investirono, ovviamente, anche il settore dell'attività spaziale, dati gli alti costi che questa comportava. Uno degli elementi che più incideva sull'onerosità dei programmi spaziali era il fatto che, per ogni missione, il veicolo usato andava completamente distrutto. Nacque così l'idea del reusable ('riusabile'), il cui primo esempio è lo Space Shuttle.
La parola shuttle significa ‛spola del telaio' ed è comunemente usata per indicare veicoli, di qualsiasi tipo, che fanno continuamente avanti e indietro tra due stazioni. Lo Shuttle, che, come vedremo, nel volo di ritorno e nelle fasi di atterraggio si comporta come un aeroplano, fa la spola fra la Terra e un'orbita terrestre; per ora non si sa se e quando eventuali obiettivi più lontani potranno essere presi in considerazione. Lo Shuttle è progettato per un equipaggio di sei o sette membri (anche se i voli realizzati finora sono stati limitati a due membri), ma ha anche una versione cargo (da impiegarsi durante le fasi di costruzione delle prossime stazioni spaziali), che è poi quella attuale.
La configurazione realizzata (v. tav. IV) è per il momento limitata a quattro esemplari (i primi due sono stati battezzati Columbia ed Enterprise). Il corpo centrale è costituito dall'orbiter, che ha l'aspetto di (ed è sostanzialmente) un veicolo con ala a delta, delle dimensioni di un moderno aeroplano a reazione a medio raggio: comprende una cabina di pilotaggio, un pannello di strumentazione e un grande compartimento centrale cilindrico, per l'alloggiamento del carico utile (8,3 m di lunghezza per 4,6 m di diametro); può contenere un totale di 29,5 t di satelliti e strumentazione, e, se necessario, circa la metà del carico può essere riportata a Terra. Al decollo, il peso totale del veicolo è di 2.000 t; tre motori principali situati nella coda del veicolo e due boosters a propellente solido sviluppano complessivamente una spinta di 3.000 t. Circa due minuti dopo il decollo, i boosters si separano dal veicolo e cadono nell'oceano, per essere successivamente recuperati (ed essere riusati nei voli seguenti). Nei sei minuti successivi sono in azione i tre motori dell'orbiter, che utilizzano il propellente (una miscela di ossigeno e idrogeno liquidi), contenuto nel gigantesco serbatoio che viene poi sganciato e si distrugge al rientro nell'atmosfera terrestre (eventuali frammenti residui cadono entro aree prestabilite): è questa, oltre, ovviamente, al propellente, l'unica parte non recuperabile del veicolo. La spinta finale per l'inserimento in orbita è fornita da due piccoli motori (2,7 t) montati ai lati della coda verticale del veicolo.
Si ha poi la fase spaziale, di durata variabile, con manovre effettuabili per mezzo dei suddetti motori di manovra; per il controllo d'assetto si hanno 44 piccoli reattori montati nelle zone anteriori e posteriori del veicolo.
I parametri dell'orbita dello Shuttle possono essere variati, in modo che l'inclinazione orbitale, la sua quota (200 ÷ 900 km) e l'angolo di copertura terrestre che ne risulta possono essere scelti a seconda delle necessità della missione.
Per questi primi anni i lanci dello Shuttle avvengono dal centro Kennedy della NASA, in Florida, per cui le inclinazioni possibili variano tra 28,5° e 75°. Successivamente sarà possibile usare il poligono di lancio di Vanderberg, sulla costa occidentale degli Stati Uniti, che permetterà inclinazioni fino a 104°.
Alla fine della missione vengono azionati i retrorazzi, che, riducendo la velocità del veicolo, ne provocano la deorbitazione e poi il rientro. Prima del contatto con l'atmosfera il veicolo viene posto in assetto di elevata incidenza (per avere la necessaria forza portante). Trenta minuti prima dell'atterraggio l'orbiter incontra l'alta atmosfera a 122.000 m e la temperatura sale a più di 1.260 °C. Sul naso e sul bordo d'attacco dell'ala viene usato perciò un sistema assai ‛denso' di protezione termica, costituito da piccole mattonelle quadrate (di circa 20 cm dilato), fabbricate con varie sostanze sintetiche, molto sofisticate.
Man mano che la densità dell'aria aumenta, diminuisce la velocità dell'orbiter, che si trasforma gradualmente da veicolo spaziale in velivolo. Il controllo d'assetto viene trasferito dai razzi di controllo alle superfici aerodinamiche sull'ala e sulla coda.
Al momento del touchdown la velocità dell'orbiter è passata da 28.000 km/h (velocità orbitale) a 350 km/h.
Il primo volo orbitale del Columbia avvenne nell'Aprile 1981, con atterraggio al Dryden Flight Research Facility, California (alla fine del programma di prove, gli orbiters atterreranno al NASA Kennedy Space Center, Florida). Nel secondo volo, del novembre 1981, fu provato con successo il ‛braccio spaziale' canadese. Il terzo fu fatto atterrare a White Sands, New Mexico, il 30 marzo 1982, otto giorni dopo il lancio e dopo 129 orbite. L'equipaggio si adattò ben presto alle condizioni di gravità zero, dopo un breve periodo iniziale dei soliti disturbi fisiologici.
Indipendentemente dai risultati scientifici - che sono ancora in fase di esame -, nei primi voli lo Shuttle ha dimostrato la grande validità della formula del reusable dal punto di vista operativo. Dal punto di vista tecnologico, ha destato qualche preoccupazione il sistema di protezione termica: in seguito alle vibrazioni connesse con il lancio, infatti, alcune delle mattonelle si staccano, con evidenti conseguenze in fase di rientro. Perciò molti degli sforzi attuali sono concentrati su questo problema, anche perché il costo di ognuna delle mattonelle è dell'ordine di 1.000 dollari (fabbricazione e montaggio inclusi). Con le attuali tecnologie, i pezzi da sostituire sono circa 100 ÷ 150 per volo; la spesa, come si vede, è irrisoria, in confronto ai costi del non riusabile.
e) Il futuro
È assai difficile, oggi, prevedere il futuro dei voli spaziali. Per l'immediato, c'è lo Spacelab - ancora basato sullo Shuttle -, una versione del quale sarà realizzata nel quadro di una collaborazione NASA-ESA. Lo Spacelab è uno speciale carico pagante, contenuto nel compartimento merci durante tutto il volo; si prevede che la fase orbitale durerà 30 giorni.
Per la prima volta scienziati, ingegneri, tecnici, uomini e donne e non astronauti - potranno far esperimenti in orbita terrestre in diversi settori tecnico-scientifici: astrofisica, raggi ultravioletti, dinamica dell'atmosfera terrestre, biologia, scienza dei materiali (crescita dei metalli e leghe, compositi), fisica dei fluidi, microgravità, lavorazione in ambiente spaziale (elettroforesi), ecc. Il primo volo Spacelab è previsto per il 30 settembre 1983.
Ma lo Shuttle, lo abbiamo detto, diventerà il trasportatore spaziale per eccellenza per la costruzione di quelle stazioni che, per i prossimi 50 anni almeno, rappresenteranno il vero futuro spaziale.
bibliografia
AA.VV., Studio del controllo di assetto di un veicolo spaziale per telecomunicazioni con antenne ad altissima direttività, Consiglio Nazionale delle Ricerche, Roma 1977.
AA.VV., Studio di strutture a tecnologia avanzata e ad alta stabilità per antenne di un satellite di telecomunicazioni, Consiglio Nazionale delle Ricerche, Roma 1977.
AA.VV., Materials for space applications (a cura di P. Santini), Advisory Group for Aeronautical Research and Development, Nato Hqs., Paris 1983.
Academy of Science of the USSR, The other side of the Moon, Oxford 196‟Acta astronautica", Journal of the International Academy of Astronautics.
‟Aeronautica, missili & spazio" (a cura dell'Associazione Italiana di Aeronautica e di Astronautica).
‟Astronautics & aeronautics" (a cura dell'American Institute of Aeronautics and Astronautics).
Baker, R. M. L., Makemson, X., An introduction to astrodynamics, New York-London 1967.
Bate, R. R., Mueller D. D., White, J. E., Fundamentals of astrodynamics, New York 1971.
Battin, R. H., Astronautical guidance, New York 1964.
Berman, A. J., The physical principles of astrodynamics, New York-London 1961.
Benson, C., Faherty, W. B., Moonport. A history of Apollo launch facilities and operations, NASA, Washington 1978.
Bignier, M., Spacelab development and its operational verification, I.A.F. Paper No 77-52, Paris 1977.
Braun, W. von, Ordway, F., History of rocketry and space travel, New York 1969.
Braun, W. von, Ordway, F., The rockets' red glare, New York 1976.
Breakwell, J. V., Ross, S., Research in interplanetary transfer, in ‟ARS journal", febbraio 1961, pp. 201-208.
Breckenridge, R. A., Remote sensing of Earth from space, New York 1981.
Brouwer, D., Clemence, G. M., Methods of celestial mechanics, New York 1961.
Browman, L. J., Krock, R. H., Composite materials, New York-London 1974.
Buedeler, W., Geschichte der Raumfahrt, Künzelsau 1979.
Cartrights, M., Apollo expeditions to the Moon, NASA, Washington 1975.
Ciolkovskij, K. E., Vne zemlij, Kaluga 1920.
Cochran, T. H., Combustion experiments in a zero gravity laboratory, New York 1981.
Cooper, P. A., Holloway, P. I., The Shuttle story, in ‟Astronautics and Aeronautics", 1981, XIX, I, pp. 24-34.
Corliss, W. R., Scientific satellites, NASA Report SP 133, Washington 1967.
Crossfield, S. A., Clay, B., Testpilot der X-15, Zürich 1962.
Dooling, D., Launch the Shuttle, in ‟Astronautics and Aeronautics", 1981, XIX, 3, pp. 4-8.
Dornberger, W., V2, Dere Schuss ins Weltall., Eislingen 1952.
Dunning, R. S., The orbital mechanics of flight mechanics, NASA Report SP 325, Washington 1973.
Ertel, I., Morse, M. L., The Apollo speacecraft, voll. I e II, NASA, Washington 1969.
‟ESA technical review", ESA, Paris.
Escobal, P. R., Methods of orbit determination, New York 1965.
Ezell, E.C., The partnership. A history of the Apollo-Soyuz test project, NASA, Washington 1978.
Faget, M., Manned space flight, New York 1965.
Garibotti, J. F. e altri, Development of advanced composite materials and geodetic structures for future space systems, in ‟Acta astronautica", 1982, IX, pp. 473-480.
Garrett, H., Pike, C., Space systems and their interactions with Earth's space environment, New York 1981.
Glaser, P. E., Power from the Sun: its future, in ‟Science", novembre 1968, CLXII, pp. 857-886.
Glaser, P. E., The Earth benefits of solar power satellite, in ‟Space solar power review", 1980, I, pp. 9-38.
Goddard, R. H., The papers of R. H. Goddard, 4 voll., New York 1970.
Graul, E. H., Weltraummedizin, Berlin 1970.
Grimwood, J. M., Hacker, B. C., A history of project Gemini, NASA Washington 1977.
Harrie, D. T., Liquid propellant rocket combustion instability, NASA SP 194, Washington 1972.
Henry, J. P., Biomedical aspects of space flight, New York 1966.
Herrick, S., Astrodynamics, New York-London 1977.
Hill, P. G., Peterson, R., Mechanics and thermodynamics of propulsion, Reading, Mass., 1965.
Huang, D. H., Design of liquid propellant rocket engines, NASA Report SP 136, Washington 1966.
Huang, D. H., Solid rocket motors igniters, NASA Report SP 8651, Washington 1961.
Huang, D. H., Solid rocket performance analysis and prediction, NASA Report SP 8078, Washington 1971.
Jane's, Al the world's aircraft, missiles and spacecraft, London 1980.
Janin, G., The stability of eccentric polar orbits around the Moon, in ‟Acta astronautica", 1982, IX, pp. 421-424.
‟Journal of AIAA". American Institute of Aeronautics and Astronautics, New York.
‟Journal of astronautical sciences". American Astronautical Society, New York.
‟Journal of guidance and control". American Institute of Aeronautics and Astronautics, New York.
‟Journal of spacecraft and rockets", American Institute of Aeronautics and Astronautics, New York.
Kaplan, M. H., Modern spacecraft dynamics and control, New York 1976.
Koelle, H. H., Handbook of astronautical engineering, New York-London 1961.
Langton, N. H., The history of astronautics up to 1945, London s.d.
Leonow, A. W., Lebedew, W., Der Mensch im Weltall, Leipzig 1978.
Likins, D. W., Bouvier, H.K., Attitude control of nonrigid spacecraft, in ‟Astronautics and aeronautics", 1971, XXIX, 5, pp. 64-71.
Marshall Space Flight Center, Saturn illustrated technology, NASA, Washington 1964.
Martin, J., Communication satellite systems, Englewood Cliffs, N. J., 1978.
Nasa Historical Series, This new ocean. A history of project Mercury, NASA, Washington 1966.
Oberth, H., Die Rakete zu den Planetenräumen, München 1923-1960.
Opel, Fr. von, Die Geschichte der Raketenentwicklung, München 1968.
Perkins, W. R., Engineering of dynamic systems, New York-London 1969.
Ravelli, G., Corso di telemisure e prove di volo, Roma 1976.
Riabchikov, E., Russians in space, New York 1971.
Rosholt, R., An administrative history of NASA, 1958-1963, NASA, Washington 1966.
Sänger, E., Raketen Flugtechnik, Oldenburg-München 1933-1965.
Sänger, E., Raumfahrt heute, morgen, übermorgen, Düsseldorf 1963.
Santini, P., Aspetti delle orbite dei satelliti artificiali, in ‟Missili", Roma 1964.
Santini, P., Stability of flexible spacecraft, in ‟Acta astronautica", 1976.
Santini, P., Thermoelastic and thermal buckling analysis of large space structures, in ‟Acta astronautica", 1983 (n. speciale).
Santini, P., Bottiglieri, C., Marchetti, M., Dynamic response of large space structures, in ‟Acta astronautica", 1982, IX, pp. 455-471.
Sarner, S. F., Propellant chemistry, New York 1966.
Scarboro, C. W., Pictorial history of Cape Kennedy, 1950-1965, NASA, Washington 1966.
Sheldon, W., Soviet space exploration, the first decade, New York 1968.
Sivori, V., Conteggio alla rovescia, Roma 1970.
Smolders, P., Soviet in space, New York 1973.
Spacelab user's guide. A short introduction to spacelab, NASA-ESA, Washington 1979.
Steinhoff, E., The eagle has returned, Washington 1977.
Sutton, G. P., Ross, D.M., Rockets propulsion elements, New-York-London, 1976.
Szebehely, V., Theory of orbits. The restricted problems of three bodies, New-York-London 1967.
Thomson, W.T., Introduction to space dynamics, New-York-London 1961.
Tiesenhausen, G. von, Space flight evolution, NASA technical Memorandum, Washington 1968.
Todericiu, D., Raketentechnik im 16. Jarhundert, Düsseldorf 1977.
Turnill, R., Spaceflight directory, London 1978.
Turnill, R., The observer's book of manned spaceflight, London 1978.
U.S. Printing Office, Project Gemini, Washington 1969.
Western Union Telegraph Co., The Western union communicator, 1973.
White, W. A., A history of centrifuge in aerospace medicine, Douglas Aircraft Co., 1965.
Williams, D. D., Torques and attitude sensing in spin-stabilized synchronous satellites, in Torques and attitude sensing in Earth satellites (a cura di S. F. Singer), New York 1964.
Diritto cosmico di Rolando Quadri, Benedetto Conforti
sommario: 1. Introduzione. 2. Il problema relativo all'esistenza e alla natura delle norme applicabili alle attività cosmiche. Irrilevanza delle convenzioni sulla navigazione aerea. 3. Inconsistenza delle soluzioni fondate su dati naturalistici. 4. Il carattere non spaziale della disciplina internazionalistica delle attività cosmiche. 5. Ricostruzione dei principi applicabili. □ Bibliografia.
1. Introduzione
È da escludere, a parte talune inconsistenti fantasie profetiche, l'esistenza di veri e propri precursori del diritto internazionale cosmico. L'interesse della dottrina verso questa materia cominciò infatti a manifestarsi solo negli anni che immediatamente precedettero i primi annunci statunitensi e sovietici relativi al lancio di satelliti artificiali ed è in seguito cresciuto di pari passo con ‛'intensificarsi delle attività cosmiche e soprattutto in relazione al primo ‛allunaggio', anche se non può dirsi che allo sbrigliarsi della fantasia nelle più svariate direzioni abbia corrisposto sempre una sostanza di contributi, soprattutto a causa di una certa confusione delle scienze di cui ci occuperemo a suo luogo. È singolare che la riflessione della dottrina non si sia immediatamente esercitata, almeno in un ordine affine, da quando sulla fine della seconda guerra mondiale nuovi procedimenti tecnici permisero ai Tedeschi di lanciare dei corpi fino a 200 km dal suolo (V-2), dandosi così pratico inizio a quel progresso delle telearmi che doveva culminare nei missili intercontinentali capaci di coprire enormi distanze e la cui problematica tende a confondersi con quella dei mezzi cosmici. La dottrina, che non avvertì ab initio il valore di quelle esperienze belliche, come è dimostrato dall'assenza di indicazioni al riguardo nelle varie trattazioni di diritto internazionale bellico e in quelle generali, si è poi viceversa lanciata in una vera e propria avventura, precorrendo i tempi e dando vita a una specie di fantascienza che trova corrispondenza in una terminologia di anticipo. Così, mentre sono divenuti correnti termini come ‛astronautica', ‛diritto astronautico' ecc., non mancano autori i quali già parlano di un ‛diritto interstellare' e, come minimo, di un ‛diritto interplanetario', ed è noto che non pochi autori hanno più o meno accolto e sviluppato l'idea di un ‛metadiritto' (metalaw), del quale sono anche stati formulati taluni principi diretti a regolare i rapporti con eventuali comunità più o meno umane di origine extraterrestre! Per quanto ci riguarda, riteniamo che sia opportuno contenere la nostra analisi il più vicino possibile alle esperienze e alla portata delle esperienze già acquisite o di presumibile prossima realizzazione. È avvenuto più volte, nella storia del diritto internazionale, che nuovi avvenimenti di eccezionale rilievo generalmente conseguenti ai progressi delle scienze e della tecnica, abbiano imposto alla dottrina il compito particolarmente complesso di inquadrarli in un sistema di principi conformi ai loro caratteri, talvolta anche prendendo atto dell'impossibilità di utilizzare schemi e categorie tradizionali o della necessità di sottoporli a revisione alla luce delle nuove esperienze. Sta di fatto però che la dottrina ha in generale seguito il processo storico, piuttosto che anticiparlo con previsioni piu o meno avventate; e che solo nutrendosi dell'esperienza viva e vissuta, essa ha potuto su solide basi procedere alla revisione degli schemi preesistenti, alla costruzione di schemi nuovi o eventualmente all'inquadramento delle nuove esperienze negli schemi preesistenti utilizzando l'elemento razionale insito nelle istituzioni. Così è avvenuto, ad es., nel campo della navigazione aerea agli inizi di questo secolo e così avvenne in rapporto ai progressi della navigazione marittima, e via di seguito. Invece, nel campo cosmico, la tendenza a precorrere i tempi, con il pretesto che è possibile che tutto divenga possibile, e sotto la suggestione del senso apocalittico delle nuove conquiste della tecnica, ha fatto smarrire il senso della realtà e ha determinato un vero e proprio disorientamento sul piano metodologico, ora nel senso, come si è già accennato, di una confusione fra dati naturalistici e dati giuridici, ora nel senso di un'affrettata utilizzazione o proiezione nel nuovo campo di categorie del pensiero giuridico la cui stessa esattezza alla luce delle nuove esperienze avrebbe potuto essere contestata anche in rapporto a fenomeni cosiddetti tradizionali. In particolare la navigazione aerea e quella marittima hanno suggerito facili analogie, senza che si tenesse conto che i progressi della tecnica hanno senso e portata generale e che semmai è proprio a partire dai fenomeni cosmici che si poteva operare una revisione di uguale portata anche in rapporto ai cosiddetti fenomeni tradizionali. In effetti, se si parte dall'idea che il raggiungimento di spazi extraterrestri non è che uno degli aspetti, anche se il più sensazionale, del generale progresso tecnico che ha sconvolto i presupposti del regolamento tradizionale, dovranno considerarsi come relativamente più realistiche le teorie di quegli autori che preconizzano mutamenti radicali nel campo del diritto internazionale marittimo, oppure di quelli che preconizzano una revisione sostanziale dei principi in materia di navigazione aerea, con la conseguenza di invertire più o meno i termini di quell'analogia. D'altra parte è sempre a questa fantasiosa tendenza a precorrere i tempi che si debbono i tentativi di codificazione dei principi del diritto cosmico, onde risolvere in anticipo tutta una serie di problemi che non presentano alcuna attualità e che non è neppure detto che si debbano porre in un più o meno lontano domani. Ci riferiamo al movimento di codificazione avviato dall'Assemblea generale delle Nazioni Unite, e in particolare alla Convenzione sui principi relativi all'esplorazione e all'uso dello spazio extratmosferico, inclusi la Luna e gli altri corpi celesti, approvata da tale organo e aperta alla ratifica degli Stati membri il 26 gennaio 1967.
Circa la terminologia, noi usiamo l'espressione ‛diritto internazionale cosmico' di preferenza non solo rispetto alle espressioni che riflettono esperienze lontane ed eventuali come quelle già dette, ma anche di preferenza rispetto a tutte quelle che riflettono concezioni di natura ‛spaziale'; e ciò sia nel senso di separare e distinguere gli spazi cosmici dallo spazio terrestre, com'è il caso per l'espressione d'uso nella letteratura angloamericana outer space law, sia nel senso di utilizzare la categoria dello ‛spazio' come misura giuridica dei fenomeni cosmici anche eventualmente a prescindere dalla separazione indicata, com'è per l'espressione angloamericana space law e per quella tedesca Weltraumrecht. Infatti, parlando di diritto internazionale degli spazi esterni, extraterrestri (ed extratmosferici), si cade in una petizione di principio da un lato, si urta contro le esperienze già acquisite dall'altro. In effetti la questione fondamentale da risolvere è proprio quella se il diritto internazionale proceda o no da un punto di vista spaziale. È ben possibile invece supporre che esso si ponga da un punto di vista ‛funzionale', in rapporto dunque non al ‛luogo' nel quale i fenomeni cosmici si manifestano, bensì alle attività cosmiche in quanto tali e ai loro effetti. Resta poi da vedere se e in quale misura le attività cosmiche di cui esiste un'esperienza storica siano effettivamente extraterrestri, esterne, extratmosferiche. D'altro lato, parlando di diritto degli spazi puramente e semplicemente, senza allusioni a una separazione fra la zona terrestre e quella o quelle extraterrestri, si commette il grave errore di utilizzare terminologicamente una categoria, quella dello ‛spazio', che viene poi disdetta nella sostanza delle trattazioni. L'impiego della categoria spaziale ha senso infatti solo se e fino a quando vengano opposte zone a regime giuridico differente e in particolare una zona terrestre a una zona extraterrestre o similmente. Ma ove questa opposizione fra zone non venga ammessa ovvero tale opposizione venga comunque considerata come oggetto di discussione, è chiaro che la categoria dello spazio non esercita giuridicamente alcuna funzione. È vero che ogni fenomeno reale si situa in una relazione spaziale, ma ciò non significa affatto che questa situazione sia rilevante per il regolamento giuridico.
Parlando invece di diritto internazionale cosmico si evitano tutte queste incongruenze, difficoltà e improprietà di linguaggio. In effetti cosmo è non solo tutto lo spazio e quindi anche quello terrestre, ma è altresì tutto ciò che vi ha luogo. L'espressione è quindi abbastanza neutra per coprire ogni possibile posizione e soluzione di problemi. D'altro lato tale espressione si presta a opporre tutti i fenomeni ai quali è essenziale l'ambiente terrestre a quelli, oggetto per l'appunto del diritto cosmico, cui i caratteri dell'ambiente terrestre sono indifferenti.
2. Il problema relativo all'esistenza e alla natura delle norme applicabili alle attività cosmiche. Irrilevanza delle convenzioni sulla navigazione aerea
La questione fondamentale è quella che riguarda la natura della nuova branca del diritto internazionale o, se si vuole, del diritto tout court. Si tratta di ius conditum e cioè di un insieme di regole già in vigore o si tratta di ius condendum e cioè di una spes iuris (magari di un diritto in statu nascendi) diversamente concepito e concepibile a seconda della formazione dei giuristi o dell'interesse dei vari governi?
Secondo un'opinione sostenuta soprattutto all'epoca dei primi lanci spaziali, verso la fine degli anni cinquanta, la disciplina giuridica delle attività cosmiche sarebbe già ricavabile, nelle sue linee generali, e sia pure implicitamente, dai due grandi trattati cui si deve la codificazione dei principi consuetudinari relativi alla navigazione aerea, ossia la Convenzione di Parigi dell 3 ottobre 1919 e quella di Chicago del 7 dicembre 1944. Significativi al riguardo sarebbero i primi articoli delle due Convenzioni, i quali attribuiscono agli Stati la sovranità completa ed esclusiva sullo spazio atmosferico (o aereo) al di sopra dei loro territori. Non vi è accordo peraltro, e anzi esistono due posizioni nettamente contrapposte, sulle conclusioni che dovrebbero trarsi dalla regola sancita da siffatti articoli. Sostengono alcuni che essa, sebbene contempli il solo spazio atmosferico in quanto unico spazio praticamente rilevante all'epoca della stipula delle Convenzioni, dovrebbe considerarsi come automaticamente estesa agli spazi cosmici (lex minus dixit quam voluit); secondo altri, invece, proprio la sottoposizione alla sovranità dei singoli Stati dello spazio atmosferico implicherebbe, a contrario, la libertà degli spazi extratmosferici e la loro natura di res communis omnium.
A nostro avviso le Convenzioni di Parigi e di Chicago non hanno mai avuto né hanno nulla da dire a proposito dei fenomeni cosmici.
Per quanto attiene alla Convenzione di Parigi, pare fuori dubbio che essa presenti storicamente un nesso molto stretto con esigenze di natura bellica, con esigenze di sicurezza quali si erano manifestate nel corso della prima guerra mondiale e particolarmente nel campo della neutralità. È noto che agli inizi del fenomeno della navigazione aerea l'orientamento dottrinale fu largamente favorevole al principio della libertà degli spazi aerei (anche se variamente limitata) o quanto meno alla distinzione in due o tre zone degli spazi aerei, in modo da assicurare solo in una porzione limitatissima di questi (ad es. 300 m, cioè l'altezza della allora più alta costruzione umana, la torre Eiffel) l'esclusività e la pienezza sovrana dello Stato sottostante. Malgrado talune reazioni, si può dire che, nel periodo anteriore alla prima guerra mondiale, il principio della sovranità dello Stato sullo spazio aereo non sia mai stato accolto in modo sicuro e incontestato.
Fu in sostanza nel corso della prima guerra mondiale che il principio della libertà degli spazi aerei si urtò all'opposizione assoluta degli Stati rimasti neutrali in vista dei danni che avrebbero potuto derivar loro dalla trasformazione dei loro cieli in teatro della guerra. Fu così la stessa Conferenza della pace di Parigi a organizzare una Commissione aeronautica interalleata al fine di redigere un progetto di convenzione sulla navigazione aerea. Questa Commissione si pronunciò a favore della sovranità piena e assoluta dello Stato sottostante. E tale principio fu incorporato nell'art. 1 della Convenzione di Parigi precitata: Les Hautes Parties Contractantes reconnaissent que chaque Puissance a la souveraineté complete et exclusive sur l'espace atmosphérique au dessus de son territoire. Lo stesso principio venne poi incorporato nella Convenzione di Madrid del 1926 fra la Spagna e alcuni Stati dell'America Latina, nella Convenzione per l'aviazione commerciale fra gli Stati Uniti e altri Stati americani firmata all'Avana il 20 febbraio 1928 e infine nell'art. 1 della Convenzione di Chicago sull'aviazione civile, che riproduce integralmente la formula della Convenzione di Parigi, salva la sostituzione del termine ‛spazio aereo' a quello ‛spazio atmosferico'.
La dottrina anteriore alle esperienze cosmiche, prendendo atto di tali enunciazioni, non contestò in generale il principio dell'estendersi della sovranità dello Stato al di sopra del suolo, raffigurando il territorio come una entità tridimensionale a forma di cono o piramide avente la punta al centro della Terra e la base ora nell'infinito (cuius solum est, eius est usque ad infinitum), ora ai limiti dell'atmosfera terrestre, ora in una zona inferiore dell'atmosfera terrestre; per lo più peraltro non approfondendo il problema dei limiti superiori esterni del territorio, dato che le difficoltà di un tale problema non erano compensate da un apprezzabile interesse pratico. Così se la dottrina riconobbe talvolta su un piano logico che la teoria che spingeva la sovranità dello Stato usque ad infinitum non era in realtà che uno slogan, un espediente per sfuggire le difficoltà, in realtà essa non seppe per lo più opporre sul piano positivo nessun argomento di notevole rilievo, spesso limitandosi a parafrasare la teoria criticata dicendo che essa spingeva la sovranità dello Stato usque ad absurdum. In conclusione si può dire che nella dottrina anteriore alle esperienze cosmiche non esiste nessun preciso orientamento circa i limiti esterni superiori della sovranità statale, sicché la tesi della illimitatezza di questa, o quanto meno della indeterminatezza dei confini di questa, compare ancora negli scritti di diritto aeronautico degli anni cinquanta, dove spesso si dichiara di dover rinunciare alla soluzione di un tale problema, malgrado la configurazione tridimensionale del territorio, e ci si appaga della sola delimitazione laterale.
In sostanza la dottrina, partendo dall'idea che l'estendersi della sovranità dello Stato al di sopra del suolo si giustifichi con criteri di sicurezza, in particolare con riguardo alla possibilità di caduta di oggetti sul suolo, oltre che di osservazione dall'alto, doveva necessariamente essere portata a escludere ogni limite superiore e cioè la divisione degli spazi in più zone, poiché i progressi della tecnica spostavano sempre più in alto i pericoli di offesa. E ciò spiega perché di fronte alle prime esperienze cosmiche si è subito fatta strada la prima delle due tesi che dianzi ricordavamo, la tesi cioè secondo cui le Convenzioni citate sulla navigazione aerea, parlando di spazio ‛atmosferico' o ‛aereo', non intenderebbero affatto determinare un limite superiore alla sfera della sovranità dello Stato, ma semplicemente userebbero espressioni che nel 1919 e nel 1944 apparivano sufficienti a coprire ogni ipotesi. Le esigenze della sicurezza, alla cui soddisfazione mirarono le stipulazioni indicate, implicherebbero logicamente un'estensione, oltre la portata strettamente terminologica delle disposizioni, dell'esclusività statale.
Riteniamo anche noi che la terminologia usata dagli artt. I delle Convenzioni di Parigi e di Chicago non sia vincolante, ma ciò per dedurne proprio il contrario della teoria esposta. In effetti ci pare da scartare l'idea che i negoziatori di tali Convenzioni abbiano avuto in vista, come sembrerebbero indicare le espressioni, la presenza di gas terrestre sia pure minima. D'altra parte, se è vero che i negoziatori si posero un problema di sicurezza e, quindi, di esclusività statale, è certo che essi non ebbero riguardo che al fenomeno della navigazione aerea e che pertanto costituirebbe un abuso bello e buono estendere la portata delle disposizioni oltre i limiti determinati dall'oggetto del regolamento e, più particolarmente, a fenomeni imprevisti e cosi nuovi e diversi anche Sotto l'aspetto tecnico quali quelli cosmici. Va anzi aggiunto che nell'economia generale delle Convenzioni, l'enunciazione del principio della sovranità statale sugli spazi aerei non ha carattere tecnico, dato che esso fu espresso una volta sola senza che, durante i lavori preparatori delle Convenzioni medesime, se ne discutesse neppure la portata e che si evitò accuratamente, nel redigere gli altri articoli (relativi agli aspetti tecnici della navigazione aerea), di richiamarsi a tale enunciazione, considerata evidentemente dagli stessi negoziatori come equivoca e pericolosa. Poiché d'altro lato tali Convenzioni non potrebbero essere più chiare nell'indicare l'oggetto del loro regolamento, dato che non parlano che di aéronef (aircraft) e dato che esse insistono nel definire il loro esclusivo oggetto anche nell'Annesso VII della Convenzione di Chicago, che riproduce un Annesso della Convenzione di Parigi, riferendosi espressamente ai soli mezzi di locomozione che utilizzano la pesantezza dell'aria o la spinta aerodinamica, appare come una pura astrazione la stessa tesi che, fondandosi sulla lettera degli artt. 1, vuole spingere i limiti della sovranità dello Stato fino a quelli dell'involucro gassoso. È infatti ben noto che, a dispetto di ogni progresso tecnico, la navigazione aerea in senso proprio non è concepibile che nei limiti della tropo sfera (una decina di km) o al massimo della stratosfera (fino a una quarantina di km). Se ne può dedurre che le espressioni spazio ‛aereo' e spazio ‛atmosferico' furono impiegate per superare le difficoltà di precisazioni difficili o impossibili dati i progressi della navigazione aerea, ma che esse non intesero affatto adottare un criterio funzionalmente insignificante quale quello della presenza sia pur minima di gas terrestre. L'oggetto di tali Convenzioni essendo solo ed esclusivamente la navigazione aerea, si deve dunque ritenere, del resto con un numero sempre crescente di scrittori, che il limite sia stato stabilito là dove è ancora possibile un'efficiente spinta aerodinamica. In realtà lo scopo delle disposizioni di cui è questione non sembra affatto quello di risolvere problemi di portata generale, ma piuttosto quello di fornire un mezzo di interpretazione delle altre disposizioni ponendo una ragionevole presunzione a favore dell'esclusività statale nella materia oggetto del regolamento, il quale, considerato in se stesso, avrebbe potuto dar luogo a non pochi dubbi circa l'autonomia rilasciata allo Stato di sorvolo.
Se le considerazioni che precedono sono esatte, è da censurare anche l'altra opinione sostenuta alla luce delle Convenzioni di Parigi e di Chicago, quella cioè che pretende ricavare dai citati artt. I, con argomento a contrario, la natura di res communis omnium degli spazi atmosferici extrastratosferici o di quelli extratmosferici. Se infatti le Convenzioni indicate si occupano in modo esclusivo della navigazione aerea e della zona in cui questa è possibile, esse non possono risolvere implicitamente problemi di altra natura, i quali pertanto restano in base a esse del tutto aperti.
3. Inconsistenza delle soluzioni fondate su dati naturalistici
Quasi tutti gli scrittori, siano o non siano favorevoli all'utilizzazione, nel dominio cosmico, delle Convenzioni internazionali sulla navigazione aerea, subiscono la tentazione di risolvere in base a dati naturalistici il problema della natura giuridica degli spazi cosmici e ciò in vista di una rigida separazione di zone (atmosfera, extratmosfera), attribuite rispettivamente alla sovranità dei singoli Stati sottostanti ovvero al comune uso dell'umanità. Sulla base di dati naturalistici, in altri termini, si vuole applicare agli spazi quella separazione fra zone che è caratteristica della dottrina relativa al regime giuridico dei mari, distinti alla stregua dei concetti di mare territoriale, sottoposto alla sovranità dello Stato costiero, e di mare libero, aperto all'uso di tutti. E si vuole con ciò contrastare la teoria spaziale dell'usque ad infinitum (usque ad coelum, usque ad sidera). Dati naturalistici e separazione fra zone sono anche presupposti della citata Convenzione del 1967, che ha inteso codificare i principi applicabili agli spazi cosmici: gli artt. 1 e 2 della Convenzione sanciscono per l'appunto il divieto di estendere la sovranità territoriale allo spazio extratmosferico (outer space), inclusi la Luna e i corpi celesti, e dichiarano che l'esplorazione e l'uso di detto spazio, liberi a tutti gli Stati su di un piano di perfetta eguaglianza, costituiscono appannaggio dell'umanità intera.
Quando il primo satellite sovietico, Sputnik I, fu piazzato in orbita, venne spontaneo domandarsi se il lancio poteva o no considerarsi in armonia con la sovranità degli Stati i cui spazi venivano attraversati. Tale satellite non poteva evitare infatti nel suo viaggio orbitale di passare e ripassare sopra a territori statali, utilizzando ad es. soltanto gli spazi antistanti il mare libero e il territorio sovietico. La prima risposta a tale quesito fu meramente naturalistica e precisamente nel senso che non era il satellite a passare di fronte ai territori esteri, ma che erano i territori esteri a passare e ripassare di fronte al satellite seguendo il movimento di rotazione della Terra. Fu risposto a sua volta che anche se per ipotesi i territori avessero cessato di ruotare intorno all'asse terrestre, Sputnik I sarebbe egualmente venuto a trovarsi di fronte a essi. Non è necessario evidentemente confutare le basi di una tale discussione circa le colpe rispettive del satellite artificiale e dei territori statali, discussione non scientifica ma faceta.
È certo comunque che la teoria che gode maggior credito e che si ritrova più o meno marcatamente presso la grande maggioranza degli scrittori di cose cosmiche, e ciò al fine di spingere la sovranità dello Stato fino ai limiti esterni dell'atmosfera e di sanzionare oltre la natura degli spazi cosmici di res communis omnium, è quella che si fonda sui movimenti cosmici. Scrive a questo riguardo l'autore che può essere a giusto titolo riguardato come il principale esponente di questo indirizzo: ‟Ogni proiezione della sovranità statale oltre l'atmosfera terrestre mancherebbe di base in considerazione della natura dei fenomeni astronomici. La rotazione della Terra intorno al proprio asse, il suo movimento di rivoluzione intorno al Sole e il movimento dei pianeti attraverso il sistema galattico fanno sì che la relazione delle sovranità particolari sulla superficie terrestre con gli spazi extratmosferici non sia mai costante per la più piccola pensabile unità di tempo. Una tale proiezione negli spazi delle sovranità basate su parti della superficie terrestre darebbe luogo a una serie di coni adiacenti dalla forma irregolare e dal contenuto continuamente cangiante [...]; i razzi, le stazioni spaziali e le astronavi muterebbero continuamente di posizione rispetto alle sovranità territoriali sottostanti nel muoversi a sì grandi velocità che, quale che sia il rapporto fra le stazioni terrestri e tali mezzi spaziali, il controllo di questi non potrebbe mai avere carattere territoriale analogo al controllo esercitato da uno Stato sullo spazio aereo o nell'ambito delle proprie acque territoriali. Solo le attività che si svolgono nei limiti dell'atmosfera terrestre appaiono suscettibili di un grado di controllo simile grosso modo a quello che può essere esercitato nei limiti delle acque territoriali o al di sopra di esse e del territorio. In ragione dei caratteri dei fenomeni astronomici fondamentali, lo spazio oltre l'atmosfera terrestre è e deve restare una cosa fuori commercio non suscettibile di appropriazioni per proiezione in un tale spazio di una qualsiasi sovranità particolare su una frazione della superficie terrestre" (v. Jenks, 1956, pp. 103 ss.). Anche in Italia vi è chi ha ripreso queste considerazioni fondandovi la costruzione degli spazi extratmosferici come res communis omnium: ‟La proiezione della sovranità territoriale nello spazio sovrastante - si è detto - assume sempre, come presupposto, un mondo statico, o quanto meno un universo nel quale i vari moti dai quali sono animati i vari sistemi sono irrilevanti rispetto alla fissazione del rapporto giun dico tra il territorio statale e il mondo che vi insiste. È chiaro che se lo spazio atmosferico si misura soltanto per qualche decina di chilometri si può ragionare come se la Terra e lo spazio nel quale essa si muove fossero fissi, anziché estremamente mobili. È invece risaputo che, mentre la Terra ruota intorno a se stessa, il nostro pianeta si sposta anche intorno al Sole alla velocità di circa 100.000 km all'ora, mentre ancora l'intero sistema solare si muove con moto infinitamente più rapido negli spazi della Galassia. Cosicché un dato punto o un dato corpo che si muove nello spazio potrà considerarsi sopra un determinato Stato e quindi assoggettabile in via ipotetica alla sua sovranità soltanto per frazioni infinitesimali di tempo. Così è pure degli oggetti (satelliti artificiali) che ruotano intorno alla Terra a velocità enormi: anch'essi passano nello spazio sovrastante l'uno o l'altro Stato con una rapidità la quale non permette di fissare alcun rapporto giuridicamente apprezzabile" (v. Monaco, 1958, pp. 587 ss.). Sempre sul piano naturalistico le considerazioni che precedono sono in generale completate osservando che, a differenza degli spazi extratmosferici, lo spazio atmosferico fa invece corpo, costituisce un tutto inseparabile, un'unità col suolo, e che quindi è logico che esso partecipi del regime giuridico di quest'ultimo restando assoggettato alla sovranità degli Stati sottostanti.
Contro la teoria ora esposta, che può essere chiamata terrestre stricto sensu poiché ha riguardo solo agli elementi più o meno materiali che compongono il nostro pianeta, alcuni autori hanno adottato punti di vista più generosi nei riguardi della sovranità dello Stato, non esitando ad ammettere una proiezione di questa negli spazi extratmosferici, cioè fino al limite ove la forza di gravitazione terrestre viene a cessare (teorie terrestri lato sensu) in quanto sopraffatta da quella degli altri corpi celesti. La Terra è al centro di un sistema che essa controlla e governa in virtù della forza di gravità. Se il potere della Terra si irradia ben oltre l'atmosfera, perché la sovranità dello Stato dovrebbe subire questo limite? Non è forse vero che la Luna, il satellite della Terra, gira con essa intorno al Sole accompagnandola nei suoi movimenti cosmici in un ordine quasi perfetto (salvo piccole oscillazioni) e mantenendo una posizione costante rispetto all'asse terrestre? Anziché assumere, dunque, come criterio la presenza di gas terrestre, fenomeno a un certo punto quasi impercettibile e, quindi, insignificante, converrebbe piuttosto assumere come criterio la forza di gravitazione (altri specificano la possibilità di ‛caduta'). Non può dirsi però che questo insieme di teorie sia molto chiaro e determinato. Alcune formulazioni sono state interpretate nel senso che il limite della sovranità statale sarebbe là dove la forza di gravitazione della Terra è controbilanciata da quella del Sole, mentre altre teorie si contentano di assumere come limite la zona in cui prevale la forza di attrazione della Luna.
In realtà, tutte le teorie fondate essenzialmente su dati naturalistici non possono risolvere i problemi che si propongono in quanto invertono il processo logico della ricerca giuridica. Anziché ricercare in primo luogo il fondamento e il senso dell'esclusività statale per poi commisurarvi i fenomeni oggetto di studio in base ai loro caratteri reali eventualmente diversi da quelli tradizionali (navigazione aerea, ecc.), esse assumono a caso e in modo dogmatico un qualsiasi criterio giuridico (possibilità di controllo delle attività spaziali; esigenze di sicurezza; ecc.) senza controllarne la validità, la portata e il rapporto possibile con i fenomeni oggetto di studio. Ora se è vero, senza dubbio, che il giurista ha bisogno del tecnico, dell'esperto onde controllare se la ratio di una norma copra o no una determinata esperienza, è altresì vero che il giurista conserva tutta la sua autonomia nel formulare la quaestio iuris e cioè l'ipotesi normativa cui rapportare i dati dell'esperienza. Fin quando quindi la quaestio iuris non sia esattamente formulata, ogni ricerca naturalistica non può essere di alcun ausilio per il giurista. Una volta smarrito il senso della ricerca scientifica e operata la confusione delle scienze, il ragionamento tende naturalmente a deviare e a perdersi in considerazioni non pertinenti. Così è manifestamente privo di senso, onde separare giuridicamente due zone - l'una esclusivistica, l'altra di comune uso -, appellarsi alla circostanza che l'atmosfera fa parte della Terra, costituisce un'unità fisica con essa, mentre gli spazi extratmosferici sono un aliud rispetto alla Terra. Queste considerazioni possono evidentemente avere senso e interesse solo sul piano naturalistico, non su quello giuridico, poiché al problema giuridico è manifestamente estranea la presenza o meno di gas terrestre, dato che, superato il limite ove è possibile la navigazione aerea, la presenza minima di gas non puo contrassegnare i fenomeni che vi hanno luogo rispetto a quelli che hanno luogo negli spazi extratmosferici. Così è ugualmente privo di senso appellarsi, sempre allo stesso fine, alla velocità dei movimenti cosmici, alla fissità degli oggetti dall'angolo visuale terrestre, alla loro stazionarietà e così via. Infatti, anche nei limiti dell'atmosfera terrestre un corpo può muoversi a velocità fantastiche (com'è il caso dei mezzi cosmici), tali da rendere inconcepibile una qualsiasi ‛localizzazione', mentre, per converso, una ‛localizzazione' sotto certi aspetti è concepibile anche negli spazi extratmosferici. Ne derivano assurde affermazioni come quella che, mentre il controllo esercitato dallo Stato fino ai limiti dell'atmosfera è paragonabile a quello esercitato, ad es., nei limiti del mare territoriale, negli spazi extratmosferici ciò non sarebbe concepibile. Ora, è vero al contrario che il controllo dello Stato è altrettanto impossibile negli spazi extratmosferici che in quelli superiori dell'atmosfera (almeno extrastratosferici) e che esso è comunque sempre impossibile quando si tratti di mezzi cosmici dovunque essi si muovano, in considerazione della loro velocità.
Si aggiunga che i dati naturalistici ai quali si fa riferimento sono indeterminati o indeterminabili ed eccedono quasi sempre i limiti della ragionevolezza. Così è a dire in modo particolare per il limite atmosferico, essendoché non esiste una nozione generalmente accolta, dal punto di vista dimensionale, dell'atmosfera. Vi è anzi chi giustamente ha osservato che non si può neppure parlare, fisicamente, di un limite atmosferico dato che l'atmosfera decresce gradualmente man mano che si amplifica in altezza fino a perdersi e a divenire impercettibile. D'altro lato appare manifestamente assurdo fondarsi sulla forza di gravitazione terrestre, dato che ciò implicherebbe la proiezione della sovranità dello Stato a distanze esagerate e implicherebbe che anche la Luna venga a cadere volta a volta in questo o quel settore di esclusività.
4. Il carattere non spaziale della disciplina internazionalistica delle attività cosmiche
A nostro avviso è senz'altro vero ciò che la maggioranza della dottrina esplicitamente o implicitamente riconosce, e cioè che i principi del diritto internazionale tradizionale sono più che sufficienti per risolvere i problemi fondamentali in ordine alle attività cosmiche. Ma per giustificare questa conclusione occorre liberare la dottrina del diritto internazionale cosmico dalla servitù verso il diritto internazionale della navigazione aerea, servitù che ha deviato la ricerca giuridica dalle sue basi naturali deformando i termini della quaestio iuris.
Come si è fin qui visto, la dottrina, nella sua stragrande maggioranza, pone il problema giuridico in termini essenzialmente spaziali, come problema di separazione tra due zone delle quali una di esclusività sovrana e l'altra (infinita) di uso comune o di comune libertà. Tale posizione del problema deve appunto considerarsi il frutto dell'aver assunto come dato fondamentale, ereditato dalla dottrina del diritto aeronautico (anche perché la più gran parte degli scrittori di diritto cosmico è costituita da cultori del diritto aeronautico), la nozione spaziale di sovranità territoriale, con la conseguenza che il problema è Stato trasformato in quello ‛da dove' (cioè da quale altezza o distanza dal suolo) le attività cosmiche siano libere. Il che ha portato allo sfoggio, oltre che dei criteri naturalistici in precedenza considerati, di cifre più o meno fantastiche e di criteri addirittura ridicoli. Basti pensare che qualcuno ha preteso estendere la sovranità dello Stato fin dove un oggetto lanciato dal Texas possa ricadervi o fin dove ... il cielo è blu! Quanto alle cifre, esse vanno dai 37 ai 38 km (teoria dell'altezza fino alla quale la navigazione aerea è possibile), e dagli 84 km (cioè il punto ove cessa la reazione aerodinamica) fino ai 90.000 km e più. Non pochi scrittori hanno d'altro canto insistito sulla opportunità o sulla necessità di fissare un limite convenzionale in linea di transazione fra le varie proposte. Ed è inutile aggiungere che su questo punto l'accordo non si è mai formato, ove si consideri che la stessa, già citata, Convenzione del 1967 sulla codificazione dei principi di diritto cosmico, parlando genericamente di outer space a proposito degli spazi cosmici sottratti alle sovranità statali, presuppone detto limite ma non lo determina.
Vero è che il problema non è ‛spaziale', che la quaestio iuris non ha per oggetto la ‛localizzazione' delle attività cosmiche, ma la natura e i caratteri di queste. E in primo luogo bisogna chiedersi: che cos'è la sovranità territoriale? Può questa nozione coprire le attività cosmiche? Può essa coprire almeno quella parte delle attività cosmiche che si svolge nell'atmosfera? La risposta non può che essere negativa.
Bisogna liberare la mente dei giuristi dall'idea assoluta della esclusività spaziale derivata dalle concezioni patrimonialistiche del territorio. La sovranità territoriale, ben lungi dall'essere un diritto reale, astratto, patrimoniale, sul territorio o sullo spazio territoriale considerati come res non è altro che una modalità di protezione dell'attività di governo di una determinata comunità politica. L'oggetto della protezione internazionale è l'attività di governo delle varie persone statali. Una normale esplicazione dell'attività di governo implica una sfera di esclusività, sia per la protezione dei vari interessi comunitari sia per l'efficacia delle varie misure al riguardo. Perciò la sovranità territoriale, come protezione rispetto all'esterno dell'attività di governo, implica che nessuno Stato al di fuori di quello territoriale possa esplicare attività di natura coercitiva sulle persone e cose che si trovano sul territorio. Il regolamento spaziale e cioè l'esclusività spaziale nell'esercizio dell'attività di governo non ha dunque il senso di un'esclusività che si riferisce all'uso dello spazio in quanto tale, ma di un'esclusività che si riferisce al governo delle attività che vi si svolgono. E naturalmente in quanto siano spazialmente o territorialmente governabili. Questa affermazione deriva dallo stesso presupposto della protezione internazionale dell'attività di governo e cioè l'effettività, il che è quanto dire la capacità della persona statale o struttura sovrana protetta di controllare, di governare le attività che si svolgono sul territorio. Le attività per loro natura incoercibili non possono venire coperte dal concetto di sovranità territoriale per la contraddizione che non consente. D'altro lato la protezione della sfera di esclusività di cui è questione non è gratuita. Essa ha come correlato necessario tutta una serie di obblighi i quali presuppongono appunto l'effettività del potere statale territoriale e quindi la controllabilità, la governabilità dei contegni e dei fatti che hanno luogo nell'ambito dello spazio territoriale. Alludiamo particolarmente agli obblighi che il diritto internazionale impone a ogni Stato per quanto attiene alla prevenzione e alla repressione dei fatti dannosi contro stranieri e contro le persone statali straniere e i loro organi. Alludiamo egualmente agli obblighi che incombono agli Stati rimasti neutrali di fronte a un conflitto armato di impedire che il territorio sia trasformato in base di operazioni militari contro gli Stati belligeranti. Anche da questo punto di vista, dunque, si può escludere che le attività per loro natura incoercibili siano coperte dalla situazione di sovranità territoriale. La prassi internazionale è particolarmente rigorosa nell'assumere questa correlazione fra esclusività territorialistica ed effettività del potere di governo delle attività territoriali. Così in non pochi casi venne minacciata la violazione dello spazio territoriale o questa addirittura ebbe luogo quando il governo territoriale o non intendeva o non era in grado di attuare la protezione degli interessi stranieri.
Rispetto alle attività per loro natura incoercibili la prassi internazionale è viceversa ben stabilita nel senso che esse siano sottratte alla sfera dell'esclusività spaziale territoriale, affermandosi a tal riguardo, da un punto di vista spaziale, la libertà di tutti gli Stati, il che equivale a dire che rispetto a tal genere di attività la sovranità territoriale non ha più ragione di manifestarsi. Basti a tal riguardo ricordare la prassi e la dottrina in materia di radiotelegrafia. Una parte della dottrina, e inizialmente la maggior parte, ha preteso anche di dedurre dall'idea della sovranità sullo spazio aereo, della tridimensionalità dell'esclusività territoriale e dell'impenetrabilità (Undurchdringlichkeit) dello spazio territoriale il fatto che ogni Stato avrebbe potuto esigere che le onde hertziane provenienti dall'estero non venissero propagate attraverso lo spazio territoriale. Contro questa assurda teoria, che non si è mai riusciti a far prevalere in una conferenza internazionale, né a incorporare in una convenzione internazionale in materia di radiotelegrafia, ha prevalso poi una considerazione più realistica dei fenomeni che ha consentito di porre la quaestio iuris, anziché in relazione all'esclusività spaziale, in relazione alla natura e ai caratteri dei nuovi fenomeni, considerati appunto per loro natura incoercibili. Così, liberata la teoria del diritto internazionale della radiotelegrafia dalla servitù verso il principio della sovranità sullo spazio aereo affermatosi con riferimento alla navigazione aerea, si sono sviluppate altre teorie come quella della libertà dell'etere e quella del coimperio sull'etere, che hanno permesso di costruire un diritto internazionale delle telecomunicazioni in maniera del tutto autonoma rispetto a quello della navigazione aerea. In effetti si è posta agli scrittori e soprattutto alla prassi un'alternativa che non avrebbe potuto lasciare indifferente l'opinione pubblica mondiale e anche quella dei governi: o rinunciare ai benefici di questo nuovo modo di comunicare a distanza, di trasmettere notizie, ordini ecc., ovvero ammettere che gli Stati possono propagare le onde invadendo gli spazi eterei delle zone territoriali altrui. La scelta evidentemente non poteva essere dubbia, essendoché non sarebbe stato realistico supporre che l'umanità si adattasse a una siffatta rinuncia.
Considerazioni analoghe, entro certi limiti, valgono per i mezzi cosmici. Anche in questo campo si pone l'alternativa che consiste o nel rinunciare puramente e semplicemente ai benefici di questa nuova dimensione dell'attività umana, ovvero nell'ammettere che gli spazi - terrestri, gassosi o non gassosi, siano o non siano campo della forza di gravitazione - sono aperti alla circolazione cosmica. Non esiste infatti alcuna possibilità di sviluppare le attività cosmiche senza il diritto di attraversare i settori spaziali sovrastanti i vari territori degli Stati. Senza dubbio non sarebbe realistico supporre che l'opinione pubblica mondiale si adatterebbe a siffatte rinunce, se è vero, ad es., che quando si ebbero i primi lanci di satelliti, essi furono salutati come una conquista umana, indipendentemente da ogni schieramento di natura politica, proprio come avviene quando ad es. si tratti di una conquista nel campo della medicina. Il progresso tecnico, in altri termini, è un dato acquisito e il suo sviluppo non può sensatamente essere ostacolato o impedito sulla base di valutazioni che l'opinione pubblica considera minoris generis.
A parte ciò, come si disse, le attività cosmiche sono ‛incoercibili', non sono controllabili a titolo ‛spaziale' a somiglianza di quanto avviene, invece, rispetto alla tradizionale navigazione aerea. Lo Stato di sorvolo non può impedire, operando nei limiti del settore spaziale determinato dai suoi confini territoriali, che i mezzi cosmici si propaghino ovunque, ne' può adottare misure efficaci nei limiti del medesimo settore. Anche la più modesta attività di autoprotezione, consistente eventualmente nell'intercettare e nel distruggere mezzi cosmici, implicherebbe infatti quasi sempre l'invasione di altri, molti altri, settori. Come infatti potrebbe un mezzo destinato a distruggere un satellite artificiale limitare il proprio viaggio a un solo settore? D'altro lato, se è già difficile, come dicemmo, nel caso della navigazione aerea tradizionale determinare esattamente la situazione spaziale e il momento in cui il mezzo attraversa la presunta frontiera, la difficoltà diviene assoluta impossibilità nel caso dei mezzi cosmici a causa della loro velocità. Orbene: se lo Stato non ha alcuna capacità di controllare il viaggio dei mezzi cosmici, la categoria della sovranità territoriale non può essere evidentemente impiegata a tale riguardo, quale che sia l'altezza del loro viaggio nei limiti di ciascun settore. Non bisogna infatti confondere, ai fini dell'esclusività spaziale, il limite raggiunto dalle attività umane con quello riguardante la capacità di controllo ditali attività, essendoché l'idea di sovranità territoriale si connette al secondo e non al primo. Gli spazi - rispetto alle attività incoercibili - costituiscono dunque un tutto indivisibile. Di ciò costituisce riprova il fatto che sarebbe assurdo il supporre che lo Stato sorvolato possa essere destinatario di obblighi come contropartita dell'esclusività. Alcuni autori, specie riferendosi all'ipotesi della neutralità, sostengono che, pur restando integro il diritto all'esclusività spaziale, si dovrebbe fare applicazione in questo campo della teoria dell'ultra posse nemo tenetur. In altri termini lo Stato, pur avendo diritto di escludere dal suo settore spaziale i mezzi cosmici altrui, non sarebbe responsabile (a titolo di forza maggiore) dell'utilizzazione del suo settore spaziale per viaggi ostili. È evidente che lo Stato belligerante verso il quale ha luogo il viaggio ostile non attenderebbe che il mezzo cosmico abbia superato la frontiera del presunto settore neutrale! Ammettere il contrario è fare vuota astrazione. Vero è che l'esclusività territoriale ha come necessario correlato la normale possibilità di controllo delle attività e che, a prescindere da tale possibilità, non è concepibile alcuna esclusività. Né si obietti che, anche per quanto attiene alla navigazione aerea, la crescente velocità dei mezzi, lo spingersi di questi a sempre maggiori altezze, rende sempre più problematiche le garanzie dei neutrali a favore dei belligeranti. Nè si obietti ancora che è problematica, anzi, la distinzione fra navigazione aerea e astronautica, data l'esistenza di mezzi più o meno anfibi. Può infatti rispondersi che il principio dell'esclusività formatosi con riguardo ai mezzi di carattere più o meno militare, ebbe riguardo a esperienze che si inquadravano perfettamente nella ratio del principio correlativo a quello in questione. I progressi tecnici hanno posto in crisi anche il principio dell'esclusività, come risulta dal fatto che già nel corso della seconda guerra mondiale alcuni Stati neutrali, resisi conto della nuova situazione, ebbero tendenza a rivedere, alla luce delle nuove esperienze, i principi tradizionalmente vigenti. Se queste tendenze sono più o meno sfuggite alla dottrina, ciò deriva dal fatto che esse non ebbero occasione di svilupparsi dato che il conflitto travolse praticamente il mondo intiero. Di sicuro vi è che in un eventuale conflitto futuro i progressi nel campo della navigazione aerea eserciterebbero un'influenza fondamentale sui vari aspetti della neutralità e che ben difficilmente il problema potrebbe essere risolto separando una zona di esclusività da una zona libera. L'analogia con i principi del diritto marittimo tradizionale fu già scartata dalla più gran parte degli scrittori di diritto aeronautico con argomenti che restano decisivi. In più vi è da osservare che anche il diritto marittimo è in crisi, a causa dei nuovi progressi tecnici. Vi è del nuovo ovunque. Ogni termine di analogia è dunque malfermo e non può fornire un ubi consistam per il diritto internazionale cosmico.
Diversamente potrebbero stare le cose solo nel caso in cui l'esclusività spaziale, anziché essere fondata sul criterio dell'effettività del potere di governo, fosse fondata su considerazioni di diversa indole, come la protezione contro la caduta di oggetti sul territorio, oppure la protezione contro lo spionaggio, l'osservazione, la ripresa e la trasmissione di immagini, ecc. Ammettendo che queste teorie siano esatte, è evidente che l'esclusività statale dovrebbe estendersi a un settore molto vasto, tale da giustificare le tesi più generose e anche quella dell'usque ad infinitum, essendo per alcuni impossibile su tale base distinguere fra zona e zona. È su queste considerazioni cosiddette di sicurezza che è stata costruita, come si ricorderà, la teoria fondata sulla forza di gravitazione terrestre ed è compromettendo fra tali considerazioni e considerazioni di altra indole che si sono fissati all'esclusività limiti più in basso. Non è però difficile rendersi conto che un siffatto modo di rappresentare il fondamento dell'esclusività statale è del tutto errato. In effetti, anche se nel passato la possibilità di caduta di oggetti si connetteva essenzialmente alla dimensione verticale, nell'epoca dei missili le tre distanze verticale, orizzontale e cosmica si equivalgono perfettamente. Fondare l'esclusività statale sull'esigenza di evitare la caduta di corpi sul suolo è molto ingenuo. Per evitare a titolo spaziale tale eventualità ogni Stato dovrebbe essere il dominus mundi. Quanto all'osservazione, alla ripresa di immagini, ecc., l'ingenuità di un tale punto di vista balza egualmente agli occhi. Si consideri infatti che queste possibilità si connettono indissolubilmente con la stessa navigazione aerea. Si consideri d'altro lato che l'angolo visuale di un aereo che si mantenga a una notevole altezza (10.000 km, ad es.) su di una linea di frontiera è già sufficiente a coprire estensioni immense di territorio e spesso ancor più di tutto il territorio di due o più Stati.
Vero è che tutte le teorie fin qui criticate sono inficiate da una confusione fondamentale: quella fra illiceità eventuale di talune attività cosmiche in quanto tali e loro illiceità in rapporto alla localizzazione. Le attività cosmiche non sono lecite o illecite dal punto di vista della loro localizzazione, ma a seconda dei loro caratteri particolari. Dal punto di vista dei mezzi cosmici lo spazio è continuo, senza che si possa distinguere fra spazio atmosferico ed extratmosferico, fra troposfera (o eventualmente stratosfera) e zone superiori e via di seguito.
Questa conclusione potrà apparire in contrasto con le espressioni impiegate in dichiarazioni ufficiali di uomini di Stato, in risoluzioni delle Nazioni Unite, in convenzioni internazionali e soprattutto nella citata Convenzione del 1967 sulla codificazione del diritto cosmico, ove si parla sempre di outer space. Questo linguaggio non deve trarre in inganno. Infatti esso è stato impiegato allo scopo di isolare il complesso dei problemi cosmici, soprattutto rispetto al problema del disarmo, e di accentuarne gli aspetti costruttivi (cooperazione internazionale per la conquista degli spazi e per l'utilizzazione delle loro risorse, eventuale internazionalizzazione delle attività relative, ecc.). Tutto questo non implica però che il concreto regolamento della materia abbia come oggetto soltanto attività nell'ambito di spazi ultratmosferici. Al contrario il regolamento concreto (e lo vedremo ad es. in tema di responsabilità per danni causati da oggetti spaziali, dove ogni riferimento allo spazio è eliminato) non può non aver riguardo ad attività che, pur essendo destinate al dominio extraterrestre, necessariamente hanno luogo anche sul suolo e attraverso gli spazi atmosferici. Non si può insomma negare che, se da un lato può apparire opportuno affrontare a parte il problema dei mezzi destinati a operare oltre il dominio terrestre per stabilire una cooperazione a questo fine, un'ampia problematica resta comune all'insieme dei mezzi cosmici nel senso da noi indicato.
5. Ricostruzione dei principi applicabili
Resta così automaticamente scartata sia l'idea che gli spazi siano da rappresentare come res in dominio, sia quella che essi siano res communis omnium. Una volta riconosciuto infatti che i problemi cosmici non hanno riguardo a fenomeni di esclusività spaziale, anche la più remota possibilità di impiego proprio di una terminologia impostasi con la trasposizione di concetti privati-patrimonialistici nel campo del diritto internazionale viene a cessare. Il problema, quindi, la quaestio iuris non è: a chi appartengono gli spazi (allo Stato sottostante, a nessuno Stato, ecc.)? Il problema è: quali attività cosmiche sono vietate e quali sono permesse?
Noi riteniamo che, tenuto conto della novità del fenomeno, la risposta da dare alla quaestio iuris alla luce dei principi generali (è ovvio che altro è il discorso per quanto riguarda il diritto convenzionale dato che, mediante accordi, gli Stati possono imporsi reciprocamente qualsiasi limitazione, possono impegnarsi a forme di collaborazione anche le più spinte, ecc.) sia che le attività cosmiche formano oggetto di un diritto di libertà. Tale libertà (riconosciuta del resto, sia pure limitatamente all'outer space, dalla più volte indicata Convenzione di codificazione del diritto cosmico, del 1967) non è altro che un aspetto del generico diritto di libertà esistente nel diritto internazionale, come in ogni ordinamento giuridico, in virtù della cosiddetta norma di chiusura. Questa sancisce che tutte le attività che non sono vietate sono ‛giuridicamente' permesse, cioè libere e come tali protette, nel senso di non poter essere impedite. Ne consegue che le libertà cosmiche, come aspetto del generico ‛diritto di libertà', hanno carattere marginale o residuo nel senso che esse si estendono fin dove non si imbattono in un diritto, riconosciuto agli Stati dal diritto internazionale, che sia incompatibile con il loro esercizio. Il problema quindi consiste nel determinare in quali casi le attività di natura cosmica sono incompatibili con specifici diritti degli Stati.
Va al riguardo anzitutto esaminato il rapporto esistente fra il diritto di libertà e la potestà di governo. Si è detto che a ogni Stato compete il diritto di governare indisturbatamente una comunità umana (cosiddetta sovranità territoriale). Tale diritto implica che sia rispettata l'integrità dell'ordine stabilito a tal fine e quindi l'integrità dei diritti e degli obblighi in cui esso consiste. Deriva da ciò che i movimenti dei mezzi cosmici non devono alterare o intralciare le condizioni e i modi di esercizio del potere di governo, né impedire o intralciare le attività governate. In particolare quanto precede ha interesse per la navigazione aerea che è attribuita al potere di governo e, quindi, alla responsabilità dello Stato di sorvolo. I movimenti dei mezzi cosmici non devono alterare o pregiudicare la situazione di questa, ad es. attraversando le zone di effettiva navigazione aerea. Il limite che ne risulta non è, però, spaziale, ma funzionale, in quanto sussiste solo per quanto è necessario e sufficiente ad assicurare l'integrità delle attività attribuite al potere di governo dello Stato territoriale. Così, se vi sono zone ove la navigazione aerea è esclusa, non può contestarsi la libertà di movimento dei mezzi cosmici da questo punto di vista. D'altro lato, nel caso in cui i mezzi cosmici in provenienza dall'estero disturbino la navigazione aerea, non potrà mai parlarsi di una responsabilità dello Stato territoriale, ma esclusivamente di quello che ha operato il lancio. Va anzi soggiunto che gli stessi principi sono applicabili anche rispetto alla navigazione aerea che ha luogo nel mare libero. L'art. 12 della citata Convenzione di Chicago sulla navigazione aerea stabilisce che ‟en haute mer, les règles applicable seront les régles établies conformément à la présente Convention". Tale Convenzione attribuisce all'Organizzazione per l'Aviazione Civile Internazionale il potere di regolare la navigazione aerea in alto mare. Anche in questo caso i movimenti dei mezzi cosmici subiscono lo stesso limite che essi subiscono nei settori spaziali corrispondenti a frontiere territoriali. In altri termini, la libertà di impiego di mezzi cosmici cessa là dove esiste un potere di regolare una certa attività e in quanto l'impiego di tali mezzi possa alterare o pregiudicare la situazione di tale attività. In definitiva è in questo senso limitato che devono interpretarsi talune dichiarazioni ufficiali circa la legittimazione dello Stato territoriale a intercettare, distruggere e confiscare mezzi cosmici che passino per il suo spazio aereo, dichiarazioni che, se altrimenti interpretate, sarebbero prive di senso.
Se quanto precede è esatto, ne risulta la possibilità di desumerne la soluzione del grave problema relativo alla liceita o meno dell'impiego di mezzi cosmici armati, alla creazione negli spazi di basi militari, ecc. L'unico principio che si possa formulare al riguardo è il seguente: l'impiego di mezzi cosmici è illecito in quanto violi l'integrità dell'ordine territoriale degli Stati in pace o neutrali; è lecito in quanto tale impiego sia indifferente rispetto alla detta integrità. In altri termini, i mezzi cosmici non devono alterare la situazione di tutte le attività attribuite alla potestà di governo degli Stati sottostanti. Per il momento il problema può avere interesse pratico solo per i mezzi cosmici diretti da una parte all'altra della superficie terrestre (missili balistici). Non esistono infatti mezzi capaci di operare il lancio a partire da piattaforme spaziali, da basi extraterrestri. Anche per quanto attiene ai missili balistici appare problematica la possibilità della loro intercettazione, distruzione, ecc. Anzi, lo Stato il cui settore venga attraversato non avrebbe neppure evidentemente interesse a provocare scontri con mezzi cosmici armati. E possibile però che in avvenire sia attuabile una vera e propria guerra cosmica con scontri, conseguenti esplosioni, lanci sulla Terra di ordigni offensivi, ecc. e che ciò renda inconcepibile l'integrità dei neutrali. A noi pare, comunque, in conformità al principio indicato, che sia erroneo parlare di un assoluto divieto d'impiego di mezzi cosmici armati, di creazione di basi extraterrestri, ecc. Se il criterio è quello dell'integrità dell'ordine statale, esso implica concrete valutazioni e non consente conclusioni assolute. D'altro lato la pericolosità come tale dei mezzi, la situazione cioè di pericolo in cui si trovano tutti gli Stati, si connette al problema del disarmo e ha portata e senso infinitamente più ampi, poiché, come dicemmo, e come risulta chiaro ove si consideri la potenza e la tecnica sofisticata delle armi moderne, le distanze verticale, orizzontale e cosmica ormai si equivalgono dal punto di vista della possibilità dell'offesa e della ‛sorpresa'. Ecco perché, dal punto di vista della sicurezza, non può annettersi grande importanza alla norma dell'art. 4 della più volte citata Convenzione di codificazione del diritto cosmico, del 1967, norma che sancisce la totale smilitarizzazione e denuclearizzazione dello spazio atmosferico e dei corpi celesti. Tale norma comunque, se vale tra gli Stati che hanno ratificato o ratificheranno la Convenzione, non ci sembra corrispondere, per quanto ora si è detto, allo stato del diritto internazionale comune e dunque non è applicabile a tutti.
Venendo al problema della condizione giuridica dei mezzi cosmici, è da ritenersi che essi, non essendo che la proiezione di un'attività, sono assimilabili all'attività stessa fin quando ne adempiono la funzione. Ne deriva che l'intercettare, il deviare o il distruggere un mezzo cosmico sarebbe un atto illecito, in quanto impedimento di una libera attività. Del resto ciò è riconosciuto dalla più gran parte degli scrittori, ed è implicitamente previsto dall'art. 8 della più volte indicata Convenzione di codificazione del 1967. Questo articolo riserva allo Stato che ha effettuato il lancio l'esclusivo ‛controllo' e l'esclusiva ‛giurisdizione' sul mezzo. Per rendere poi più agevole l'identificazione dello Stato di lancio, e conseguentemente più certo l'obbligo degli altri Stati di astenersi dall'interferire nell'attività del mezzo, l'Assemblea generale dell'ONU ha approvato e aperto alla ratifica degli Stati membri una Convenzione sull'immatricolazione degli oggetti lanciati nello spazio, prevedendo l'obbligo, per gli Stati contraenti, della tenuta di un apposito registro con l'indicazione di una serie di dati relativi a ciascun oggetto.
Particolarmente complesso è il problema relativo ai danni che possono venir prodotti dalle attività cosmiche. Un termine di analogia frequentemente invocato è quello relativo alla produzione e all'uso dell'energia atomica. Si fa valere da più parti, d'altro lato, che gli esperimenti di natura scientifica possono produrre grandi benefici come grandi mali, che essi rappresentano qualche cosa di fatale e che è impossibile misurarne il rischio. Così si patrocina talvolta l'esclusione di ogni responsabilità, mentre da altri si parla di una responsabilità comune a tutti gli Stati della Terra o si propongono forme di assicurazione o la formazione di un fondo internazionale e così via. Come si vede, il problema viene spesso posto con riferimento agli interessi generali presuntivamente serviti dal progresso scientifico, alla eventuale collaborazione fra Stati in materia, magari anche all'internazionalizzazione delle attività cosmiche. A noi sembra in ogni modo che, allo stato presente, non ci si debba discostare dai comuni principi in tema di responsabilità internazionale e che pertanto, finché le attività cosmiche conserveranno il carattere autonomo che esse hanno attualmente, debba affermarsi la responsabilità dello Stato che procede al lancio. Ai principi comuni si ispira anche la Convenzione sulla responsabilità per danni causati da oggetti spaziali, del 29 marzo 1972, un'altra delle convenzioni promosse dalle Nazioni Unite in materia cosmica. La Convenzione ribadisce la responsabilità dello Stato, o degli Stati, del lancio, e stabilisce che, per i danni causati sulla superficie terrestre o agli aerei in volo, tale responsabilità sia oggettiva, cioè indipendente da colpa, mentre, per i danni ad altri oggetti spaziali sia nell'atmosfera che negli spazi extratmosferici, essa sussista solo se sia provata la colpa dello Stato e più particolarmente delle persone addette al lancio (art. 2). Si noti il diverso trattamento previsto per il caso di danni rispettivamente agli aerei e agli oggetti spaziali nell'atmosfera: trattasi di una prova ulteriore, se ce ne fosse bisogno, del fatto che la disciplina concreta della materia cosmica non può che prescindere dalla localizzazione spaziale e badare all'attività e ai suoi caratteri.
bibliografia
British Institute of International and Comparative Law, Current problems in space law. A symposium, London 1966.
Chaumont, Ch.-M., La Résolution de Bruxelles de l'Institut de Droit International sur le droit de l'espace, in ‟Revue belge de droit international", 1965, I, pp. 15-29.
Cheng, B., From air law to space law, in ‟Current legal problems", 1960, XIII, pp. 228-254.
Cheng, B., Liability for spacecraft, in ‟Current legal problems", 1970, XXIII, pp. 216-239.
Fawcett, J. E. S., International law and the uses of outer space, Manchester 1968.
Haley, A. G., Space law and government, New York 1963.
Jenks, C. W., International law and activities in space, in ‟The international and comparative law quarterly", 1956, V, pp. 99-114.
Jessup, P. C., Taubenfeld, H. J., Controls for outer space and the Antarctic analogy, New York 1959.
Lachs, M., The international law of outer space, in ‟Recueil des cours de l'Académie de droit international de La Haye", 1964, CXIII, pp. 1-115.
Lachs, M., The law of outer space: an experience in contemporary lawmaking, Leiden 1972.
Lodigiani, G., Lineamenti di diritto cosmico, Milano 1968.
McDougal, M., Lasswell, H.D., Vlasic, I. A., Law and public order in space, London 1963.
Matte, N.M., Droit aérospatial, Paris 1976.
Monaco, R., Sovranità statale e spazio superatmosferico, in ‟Rivista di diritto internazionale", 1958, XLI, pp. 585-590.
Ogunbanwo, O. O., International law and outer space activities, den Haag 1975.
Quadri, R., Prolegomeni al diritto internazionale cosmico, Milano 1958.
Quadri, R., Droit international cosmique, in ‟Recueil des cours de l'Académie de droit international de La Haye", 1959, XCVIII, pp. 504-599.
Taubenfeld, H. J., Space and society, New York 1964.
Taubenfeld, H. J., The law relating in activities of man in space, Chicago 1970.
Theraulaz, J. D., Droit de l'espace et responsabilité, Lausanne.
Zhukov, G. P., Tendences contemporaines du développement du droit spatial international, in ‟Recueil des cours de l'Académie de droit international de La Haye", 1978, CLXI, pp. 229-328.