
Elettronica di potenza
Elettronica di potenza
Con questa locuzione si intendono le attività, i prodotti e le applicazioni che si occupano della conversione elettronica di energia elettrica, ovvero del controllo con mezzi elettronici del trasferimento di energia elettrica tra generatori e utilizzatori (carichi). L'e. di p. riguarda l'insieme dei dispositivi, sistemi e tecniche necessari per operare, con elevato rendimento energetico, trasferimenti controllati di energia elettrica. Gli apparati che realizzano elettronicamente tale controllo di energia si chiamano convertitori elettronici di potenza (qui indicati come convertitori) e svolgono la funzione di interfacce elettroniche che processano le grandezze elettriche erogate dalle sorgenti in modo da adattarle alle esigenze dei carichi. I convertitori vengono classificati in convertitori c.c./c.c. (se destinati a interfacciare sorgenti e carichi a corrente continua), convertitori c.a./c.c. o raddrizzatori (se le sorgenti sono a corrente alternata e i carichi a corrente continua), convertitori c.c./c.a. o invertitori (se le sorgenti sono a c.c. e i carichi a c.a.) e convertitori c.a./c.a. (se sorgenti e carichi sono a c.a., non necessariamente alla stessa frequenza).
Si definisce sistema elettronico di potenza l'insieme di uno o più convertitori e degli associati circuiti di filtraggio, controllo e protezione, oltre agli eventuali trasformatori (con funzioni di isolamento e adattamento dei livelli di tensione), che consentono di operare la conversione di energia desiderata ottemperando alle specifiche, statiche e dinamiche, delle sorgenti e dei carichi. L'evolversi di questo settore è stato rapido e accompagnato da una costante espansione di mercato, grazie alle possibilità offerte dai dispositivi allo stato solido di controllare la potenza elettrica non più con tempi di frazioni di secondo, caratteristica dei componenti elettromeccanici, ma di milionesimi di secondo; a ciò va aggiunta la sinergia derivante dalla possibilità di realizzare un interfacciamento diretto con la microelettronica (v. in questa App.) per eseguire un controllo completamente elettronico delle potenze elettriche. L'ampio campo di potenze in gioco nelle applicazioni (da alcuni watt fino a molti MW), le differenziate caratteristiche delle sorgenti (tensioni da alcuni volt fino a centinaia di kV, correnti tra alcuni mA e centinaia di kA) e la varietà di esigenze specifiche dei carichi fanno sì che le tecnologie realizzative dei convertitori di potenza risultino assai differenziate anche nell'ambito di una stessa classe di convertitori.
Componenti elettronici di potenza
I primi componenti elettronici a semiconduttore (v. semiconduttori, App. V) utilizzati per la conversione di potenza sono stati diodi e tiristori (v. tiristore, App. V), in particolare SCR (Silicon Controlled Rectifier), RCT (Reverse Conducting Thyristor) e TRIAC (Triode Alternate Current Switch), su cui si sono basati in particolare lo sviluppo dei circuiti raddrizzatori a stato solido già a partire dagli anni Cinquanta e la loro massiccia diffusione dagli anni Sessanta. Negli anni Settanta si sono affermati i transistori bipolari di potenza (BJT, Bipolar Junction Transistor), poi affiancati dai transistori di potenza a effetto di campo (power MOSFET, Metal Oxide Semiconductor Field Effect Transistor), sviluppati negli anni Ottanta, e dai transistori bipolari a gate isolato (IGBT, Insulated Gate Bipolar Transistor), introdotti negli anni Novanta. Nelle applicazioni elettroniche di potenza tutti i dispositivi vengono utilizzati come interruttori (switch) elettronici al fine di conseguire elevati rendimenti e bassa dissipazione di potenza.
I BJT di potenza, benché realizzati con tecnologie differenti, hanno caratteristiche di funzionamento assai simili ai transistori di segnale comunemente utilizzati nei circuiti amplificatori. Le principali differenze risiedono negli elevati valori di tensione e corrente sopportabili (fino ad alcune centinaia di volt e decine di ampere per singolo componente) e nel minore guadagno in corrente (anche inferiore a 10). Si rende pertanto necessario pilotare questi dispositivi con correnti di base assai elevate oppure ricorrere a connessioni, per es. la connessione Darlington, che aumentano il guadagno di corrente, ma anche la dissipazione di potenza durante la conduzione. Queste limitazioni, unite a una modesta velocità di commutazione (tempi di accensione e spegnimento dell'ordine dei microsecondi o decine di microsecondi), hanno favorito una progressiva sostituzione dei BJT con i power MOSFET e gli IGBT.
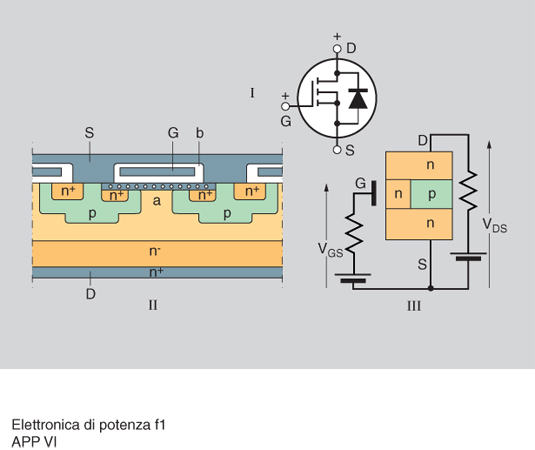
I power MOSFET sono dispositivi ad arricchimento, normalmente a canale n, in grado di sostenere tensioni dirette fino ad alcune centinaia di volt e correnti fino a decine di ampere. Vi sono al riguardo diverse tecnologie realizzative, ma tutte impiegano la connessione in parallelo di numerose celle elementari per ottenere le elevate portate di corrente richieste. La fig. 1II mostra la struttura fisica di una cella power MOSFET a conduzione verticale, in cui cioè le cariche mobili attraversano l'intero volume del dispositivo per passare dall'elettrodo di source a quello di drain. Come si nota, l'elettrodo di source S è collegato a una zona a elevata drogatura di tipo n, la quale è circondata da una zona p a minore drogatura. Quest'ultima, da un lato comunica con la zona di tipo n collegata all'elettrodo di drain D, e dall'altro si affaccia all'elettrodo di gate G, da cui è separata da un sottile strato isolante. La zona p e l'elettrodo di gate costituiscono dunque le armature di un condensatore, come mostrato nello schema equivalente di fig. 1III.
Nell'impiego normale, il dispositivo viene polarizzato con una tensione drain-source VDS positiva. In assenza di tensione applicata al gate, solo una piccola corrente di fuga attraversa la giunzione p-n al centro del dispositivo, che risulta contropolarizzata dalla tensione VDS. Applicando invece tra gate e source una tensione VGS positiva e superiore alla tensione di soglia Vth (circa 3 V), si ha che nella zona p prospiciente il gate vengono richiamate dall'elettrodo di source, per induzione elettrostatica, cariche negative che possono mascherare la drogatura preesistente e costituire una zona di inversione, cioè un canale conduttivo di tipo n tra le zone di source e drain. La corrente risultante si richiude attraverso l'elettrodo di source, cui la zona p è direttamente collegata a uno dei suoi estremi. Regolando la tensione VGS si può controllare la larghezza del canale conduttivo e la resistenza equivalente RDS del dispositivo, da valori elevatissimi (RDSoff, corrispondente al canale chiuso) fino a valori piuttosto bassi (RDSon, corrispondente alla massima apertura del canale conduttivo).
Il simbolo del power MOSFET è mostrato nella fig. 1I, che evidenzia la presenza di un diodo intrinseco (body diode) connesso in parallelo inverso al MOSFET. Tale diodo è riconoscibile in fig. 1II, dove si nota la giunzione p-n direttamente connessa tra l'elettrodo di source e quello di drain, e conferisce al power MOSFET la caratteristica di conduzione inversa.
I power MOSFET sono anche dispositivi a conduzione unipolare (la conduzione è cioè affidata a un solo tipo di cariche, p o n) e pertanto sono caratterizzati da un'estrema velocità di commutazione, che deriva dalla possibilità di costituire o rimuovere il canale di conduzione, semplicemente caricando o scaricando la piccola capacità esistente tra gli elettrodi di gate e source. I tempi di commutazione tipici richiesti per una completa transizione dallo stato di interdizione a quello di piena conduzione (tempo di accensione ton), o viceversa (tempo di spegnimento toff), sono compresi tra alcune decine e un centinaio di nanosecondi.
Gli IGBT sono dispositivi intermedi tra i transistori bipolari e i power MOSFET. Essi sono caratterizzati da cadute di tensione in conduzione minori di quelle dei power MOSFET e da maggiori portate in tensione e corrente: vengono infatti realizzati per tensioni di lavoro fino ad alcuni kV e per correnti fino a centinaia di ampere. Le caratteristiche di conduzione e commutazione sono simili a quelle dei transistori bipolari, però il comando viene dato per via capacitiva come nei power MOSFET. Corrispondentemente gli elettrodi principali vengono denominati collettore ed emettitore (come nei transistori bipolari), mentre l'elettrodo di controllo viene chiamato gate (come nei MOSFET). La conduzione è ambipolare (utilizza cioè cariche p e cariche n) e conseguentemente i tempi di commutazione sono superiori a quelli dei power MOSFET, arrivando fino ad alcuni microsecondi per il tempo di accensione (ton) e fino ad alcune decine di microsecondi per il tempo di spegnimento (toff).
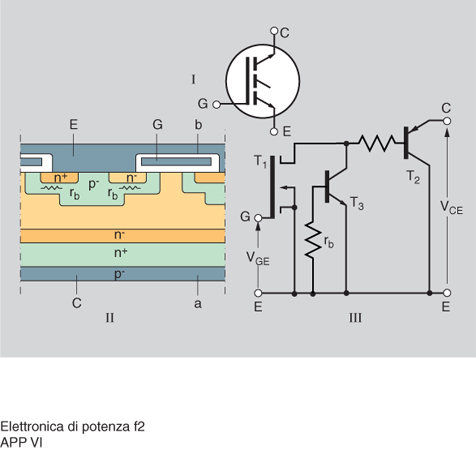
Similmente ai power MOSFET, gli IGBT sono costituiti da molte celle elementari in parallelo e sfruttano la conduzione verticale. La tipica struttura di una cella è mostrata in fig. 2II. Rispetto al power MOSFET essa include anche un substrato molto drogato di tipo p che, collegato all'elettrodo di collettore, provvede all'iniezione di cariche p che contribuiscono alla conduzione ambipolare assieme alle cariche n provenienti dall'emettitore.
Il funzionamento del dispositivo è illustrato dallo schema equivalente di fig. 2III. In condizioni normali, al dispositivo viene applicata una tensione di polarizzazione VCE positiva tra collettore C ed emettitore E. La conduzione viene controllata agendo sull'elettrodo di gate G: quando si applica una tensione gate-emettitore VGE positiva e superiore alla tensione di soglia Vth, il MOSFET T₁ entra in conduzione, pilotando a sua volta il transistore pnp T₂ che entra in conduzione anch'esso; si compie così l'accensione del componente. Quando la tensione VGE viene riportata a un valore inferiore alla soglia Vth si compie il processo inverso: il MOSFET T₁ si spegne rapidamente, annullando la corrente di base del transistore T₂, il quale si spegne anch'esso dopo un tempo (tail time) determinato dalla ricombinazione delle cariche in base.
Il componente è progettato in modo che il transistore parassita npn T₃ non entri mai in conduzione, così da evitare la condizione di latch up, normalmente distruttiva, in cui i due transistori T₂ e T₃ si pilotano l'un l'altro e il componente si porta stabilmente in conduzione (funzionamento come SCR). A tal fine, il valore della resistenza equivalente rb (resistenza trasversale della zona p) deve essere adeguatamente piccolo.
In alcune applicazioni di grande potenza sono usati i tiristori GTO (Gate Turn-off Thyristor), che possono sostenere tensioni di alcuni kV, correnti di alcuni kA ed essere controllati in accensione e spegnimento tramite l'elettrodo di gate. Le principali difficoltà applicative di questi componenti, realizzati anch'essi connettendo in parallelo numerose celle elementari, discendono dal fatto che lo spegnimento avviene estraendo dal gate, in tempi brevissimi, una corrente pari a circa il 20% della corrente anodica. Ne consegue un'elevata complessità e criticità del circuito di comando che, unita all'elevata sensibilità dei GTO alle brusche variazioni di tensione, rende il loro impiego troppo difficile e costoso per le normali applicazioni industriali. Essi sono invece impiegati in settori particolari, quale la trazione elettrica, dove l'elevata compattezza, unita alla possibilità di sostenere forti correnti, li rende competitivi rispetto ad altri componenti.
Va sottolineato che la ricerca di nuovi componenti di potenza a semiconduttore con caratteristiche migliorate è continua, anche se raramente porta a dispositivi commerciali. Tra i componenti su cui si concentrano i maggiori sforzi di sviluppo si citano gli MCT (MOS Controlled Thyristor) e i GCT (Gate-Commutated Turn-off Thyristor).
Struttura dei sistemi di conversione di potenza
Anche se alcuni dei dispositivi sopra citati (in particolare i transistori) consentirebbero regolazioni di tipo lineare, similmente a quanto accade nei circuiti amplificatori, l'esigenza di conseguire elevati rendimenti energetici, cioè basse perdite di energia nella conversione elettronica di potenza, impone l'utilizzo di tutti i componenti elettronici in regime di commutazione (funzionamento switching), cioè come interruttori che assumono i soli stati 'aperto' (off) o 'chiuso' (on). Infatti, mentre un componente elettronico in funzionamento lineare è assoggettato simultaneamente a tensioni e correnti rilevanti, ed è quindi sede di una significativa dissipazione di potenza, un componente utilizzato in modo switching dissipa una potenza modesta: nello stato off la corrente che lo attraversa è infatti trascurabile, mentre nello stato on la caduta di tensione ai suoi capi è piccola.

Il funzionamento dei convertitori di potenza può essere descritto a partire da quello della cella di conversione mostrata in fig. 3, dalla cui estensione si possono derivare le topologie dei principali convertitori. La cella è costituita da due interruttori ideali S₁ e S₂ (cioè privi di perdite e con tempi di commutazione nulli), ha due porte di tensione (1-N e 2-N), con impedenze capacitive in parallelo (C₁ e C₂), e una porta di corrente (0-N), con impedenza induttiva in serie (L₀).
Gli stati possibili della cella sono solo quelli in cui un interruttore è chiuso e l'altro è aperto. In questo modo si evitano collegamenti diretti tra i due ingressi di tensione, che causerebbero impulsi di corrente capacitivi, e anche l'apertura del ramo induttivo, che causerebbe sovratensioni impulsive.
Lo stato degli interruttori dipende in generale dallo stato della rete in cui la cella è inserita, oltre che dagli eventuali comandi impartiti agli interruttori stessi. Nel caso di interruttori non controllati (diodi) il funzionamento è interamente determinato dallo stato della rete: si parla allora di funzionamento non controllato. Nel caso di interruttori comandati in chiusura (SCR, RCT, TRIAC) il funzionamento può essere controllato agendo sulla temporizzazione dei comandi di chiusura degli interruttori: si realizza così un funzionamento a controllo di fase. Infine, nel caso di interruttori completamente controllati il funzionamento della cella è governato agendo sulla temporizzazione dei comandi di apertura e chiusura degli interruttori: si ha così un controllo di durata degli impulsi o PWM (Pulse Width Modulation).
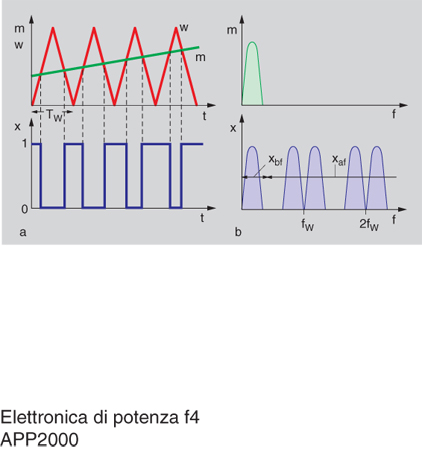
La tecnica della modulazione di durata degli impulsi è illustrata, nella sua forma più semplice (modulazione a sotto-oscillazione), in fig. 4. Una funzione portante w, triangolare, di ampiezza unitaria e periodo TW (periodo di modulazione o di commutazione), viene comparata con una funzione modulante m che evolve molto più lentamente di w. La funzione modulata x è il risultato binario della comparazione tra m e w: essa vale 1 quando m>w e 0 quando m〈w.
Sviluppando la x in serie di Fourier si verifica che essa può essere scomposta in un termine a bassa frequenza xbf, che coincide con la funzione modulante m, e un termine ad alta frequenza xaf, che contiene solo armoniche a frequenze prossime ai valori multipli della frequenza di commutazione fW=1/TW:
Si definiscono strutture a tensione impressa quelle in cui la cella è alimentata da generatori a bassa impedenza interna. Di norma essi si collegano alle porte di tensione, mentre l'uscita si preleva dalla porta di corrente. In questo caso, agendo sulle funzioni modulanti m₁ ed m₂, la cella di conversione consente di erogare al carico una tensione u₀ regolabile con continuità tra u₁ e u₂.
Nelle strutture a corrente impressa, invece, la cella viene alimentata da un generatore ad alta impedenza. Esso viene normalmente collegato alla porta di corrente, mentre l'uscita viene prelevata da una delle porte di tensione. In questo caso la cella imprime nel carico una corrente i₁ (i₂) di valore regolabile con continuità tra 0 e i₀.
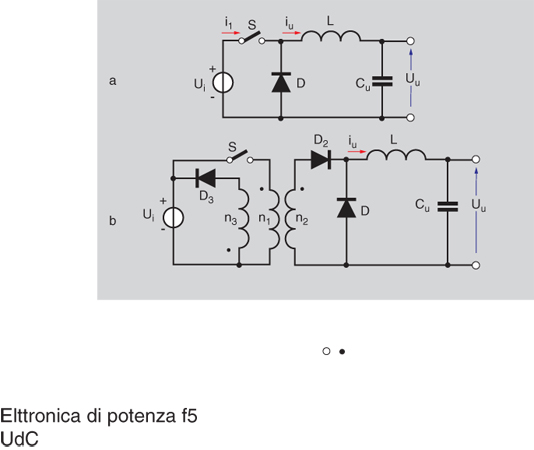
Convertitori c.c./c.c. - Le strutture elementari di convertitore c.c./c.c. sono immediatamente derivabili dalla cella di fig. 3. Il convertitore riduttore di tensione (step-down o buck converter) si ottiene collegando la sorgente di tensione continua Ui alla porta 1, cortocircuitando la porta 2 e allacciando il carico alla porta 0. Ne risulta la struttura di fig. 5a, in cui l'interruttore S è unidirezionale e S₂ è sostituito dal diodo D: ciò è possibile in quanto la tensione d'ingresso Ui è costante e positiva e anche la corrente d'uscita iu è solo positiva. In queste condizioni il diodo assume automaticamente uno stato complementare a quello dell'interruttore S: quando S è nello stato on (intervallo ton) il diodo è infatti contropolarizzato, e quindi interdetto; quando invece S è nello stato off (intervallo toff), la corrente induttiva iu forza in conduzione il diodo D. Il controllo è PWM, per cui il valore della tensione continua d'uscita vale
In questa relazione compare il duty cycle δ dell'interruttore, definito dal rapporto tra il tempo ton in cui l'interruttore è chiuso e il periodo di commutazione T, che nella trattazione dei convertitori c.c./c.c. viene considerato in luogo della funzione modulante m. Poiché δ può assumere valori tra 0 e 1, la tensione d'uscita può essere regolata con continuità da 0 a Ui. La funzione del condensatore Cu è di migliorare il filtraggio della tensione d'uscita e di abbassare l'impedenza d'uscita del convertitore.
La fig. 5b mostra una versione molto utilizzata di convertitore riduttore, detto forward converter, con isolamento a trasformatore. L'interruttore S è collegato all'avvolgimento primario del trasformatore (n₁ spire), mentre il circuito d'uscita è alimentato dall'avvolgimento secondario (n₂ spire) tramite il diodo D₂, che blocca la tensione inversa prodotta dal trasformatore. L'avvolgimento terziario (n₃ spire) e il diodo D₃ sono necessari per consentire il recupero dell'energia magnetizzante del trasformatore nella sorgente di tensione Ui dopo ogni apertura dell'interruttore S. Il funzionamento è sostanzialmente lo stesso del buck converter, a meno del rapporto di trasformazione, sicché la tensione d'uscita risulta: Uu=δUi n₂/n₁.
Il duty cycle è però limitato superiormente poiché occorre che l'interruttore resti aperto per un tempo toff sufficiente a consentire il completo recupero dell'energia magnetizzante del trasformatore. Ciò limita il massimo valore del duty cycle e, quindi, della tensione d'uscita.
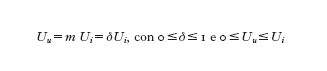
Lo schema del convertitore elevatore di tensione (step-up o boost converter) è mostrato in fig. 6 e si ottiene dalla cella di fig. 3 collegando la sorgente di tensione Ui alla porta 0, cortocircuitando la porta 1 e allacciando il carico alla porta 2. Anche in questo caso l'interruttore S può essere unidirezionale e l'interruttore S₂ può essere sostituito da un diodo D. Ponendo u₀=Ui, u₁=0, u₂=Uu e δ=m₁ si ha che Uu=Ui/(1−δ) che, per δ variabile tra 0 e 1, dà una tensione d'uscita Uu teoricamente regolabile tra Ui e infinito.
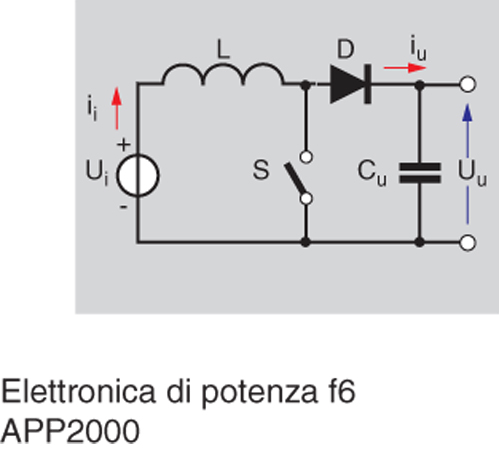
Infine, lo schema del convertitore riduttore/elevatore (buck/boost converter) è mostrato in fig. 7. Esso è ottenuto dalla cella di fig. 3 cortocircuitando la porta 0, collegando la sorgente di tensione Ui alla porta 1 e prelevando l'uscita dalla porta 2. Ponendo m₁=δ, m₂=1−δ, Ui=u₁, Uu=−u₂ e u₀=0 si ottiene la tensione di uscita Uu=Uiδ/(1−δ) che, per δ variabile tra 0 e 1, è in grado di regolare la tensione d'uscita a valori sia inferiori sia superiori alla tensione d'ingresso. Si può notare tuttavia che la tensione d'uscita ha polarità opposta a quella d'ingresso.
Le principali applicazioni dei convertitori c.c./c.c. sono nel settore degli alimentatori switching, ovvero nei circuiti di alimentazione a c.c. stabilizzati, presenti in tutti gli apparati che includono circuiti elettronici, quali telefoni cellulari, personal computer, macchine fotografiche, videocamere, giochi elettronici, elettrodomestici detti bruni (radio, televisori, compact disc player, videoregistratori, amplificatori audio) e, sempre più frequentemente, anche apparati tradizionalmente privi di parti elettroniche, quali gli elettrodomestici detti bianchi (lavatrici, lavastoviglie, forni e piastre di cottura) e gli utensili portatili (trapani, frese ecc.).
Altre applicazioni importanti sono nel settore del controllo di velocità dei motori a c.c. (azionamenti a c.c.), dove le caratteristiche di regolazione della tensione e della corrente offerte dal convertitore vengono utilizzate per controllare con rapidità e precisione coppia, velocità e posizione dell'albero meccanico del motore. Di particolare rilevanza sono gli azionamenti industriali, per il controllo di sistemi di posizionamento, avvolgimento e lavorazione nei processi di produzione industriali, e gli azionamenti per trazione, per il controllo di velocità di veicoli a propulsione elettrica, quali carrelli elevatori, auto, autobus, tram, metropolitane e treni.
Convertitori c.c./c.a. (invertitori)
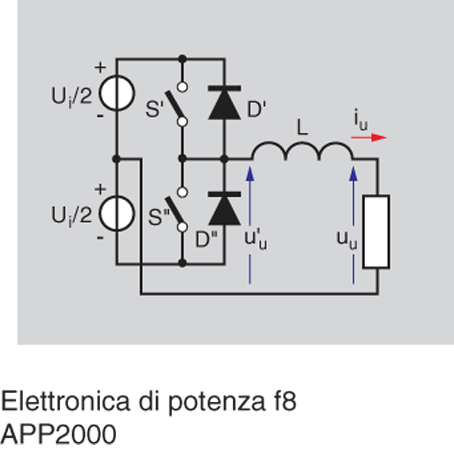
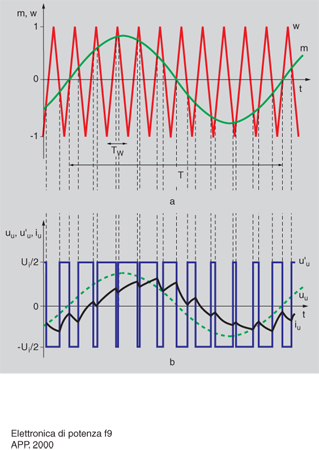
Lo schema fondamentale di un convertitore c.c./c.a., l'invertitore a mezzo ponte (half-bridge inverter), è mostrato in fig. 8 e si ottiene dalla cella di fig. 3 collegando due generatori di tensione ±Ui/2 alle porte 1 e 2 e prelevando l'uscita al morsetto 0. Gli interruttori S′ e S″, completamente controllati, sono corredati di diodi D′ e D″ in parallelo inverso, per dare una via di richiusura alla corrente induttiva del carico anche quando gli interruttori sono aperti. Ponendo u₁=Ui/2, u₂=−Ui/2 si ha: uu=(2 m₁−1) Ui/2=m Ui/2, in cui la funzione m risulta alternata con valori compresi tra −1 e +1. Ciò corrisponde alla tecnica PWM mostrata in fig. 9a (PWM a 2 livelli), che impiega una portante triangolare w a valor medio nullo e fornisce una funzione modulata x a due valori ±1. Se il controllo dell'inverter chiude S₁ quando x=1 e S₂ quando x=−1, la tensione d'uscita u′u assume l'andamento mostrato in fig. 9b e il suo valore filtrato uu risulta pari a m Ui/2. Nel caso di carico ohmico-induttivo, la corrente d'uscita assume la caratteristica forma cosiddetta a cresta di gallo mostrata in fig. 9b. Con questa tecnica la forma d'onda della funzione modulante m definisce direttamente la forma d'onda della tensione d'uscita. Per ottenere al carico una tensione sinusoidale, com'è spesso richiesto, è dunque sufficiente adottare una funzione modulante sinusoidale di ampiezza e frequenza opportune.
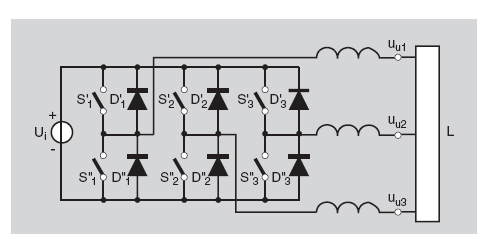
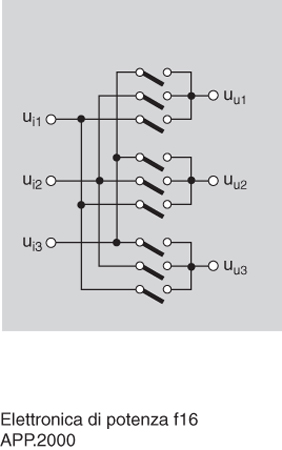
L'invertitore a mezzo ponte è comunemente utilizzato nella configurazione trifase mostrata in fig. 10. Esso consente di erogare al carico L tre tensioni indipendenti uu₁, uu₂, uu₃ le cui forme d'onda sono determinate dalle funzioni modulanti m₁, m₂, m₃ applicate a ciascuna sezione dell'inverter (S′₁-S″₁, S′₂-S″₂ e S′₃-S″₃) secondo la tecnica di modulazione a due livelli sopra descritta. Si osservi che nel caso di carico trifase senza neutro è sufficiente alimentare l'invertitore con un solo generatore di tensione d'ingresso Ui, dato che il punto centrale dell'alimentazione non è utilizzato.

Un'altra configurazione di invertitore molto usata nelle applicazioni monofase è quella a ponte (full bridge) mostrata in fig. 11a, in cui si utilizza un solo generatore di tensione Ui e il carico viene allacciato tra i morsetti di uscita delle due sezioni (S′₁-S″₁ e S′₂-S″₂) che costituiscono il ponte. In questo caso si applica la modulazione a 3 livelli illustrata in fig. 11b, in cui le due sezioni del ponte vengono comandate con la stessa portante w, ma con funzioni modulanti m₁ ed m₂ uguali e opposte. Come risultato si ottiene una tensione d'uscita uu (fig. 11c) che è costituita solo da impulsi positivi quando m₁>0 e da impulsi negativi quando m₁〈0. Rispetto alla modulazione a due livelli il contenuto armonico alle alte frequenze risulta inferiore. La tensione filtrata d'uscita risulta uu=m₁Ui ed è quindi doppia di quella fornita da un inverter a mezzo ponte: infatti le due sezioni sono comandate in opposizione di fase e le loro tensioni d'uscita si sommano. È da notare che la struttura a ponte monofase si presta anche al funzionamento a corrente impressa, cioè con alimentazione costituita da un generatore di corrente Ii in luogo del generatore di tensione Ui. In questo caso nel carico viene impressa una forma d'onda di corrente a tre livelli identica a quella di fig. 11b.
Tra le applicazioni degli invertitori vanno citati innanzitutto gli azionamenti di motori a c.a. La possibilità di controllare frequenza e forma d'onda delle tensioni e correnti erogate consente di utilizzare gli invertitori come dispositivi di controllo delle grandezze meccaniche dei motori a c.a., sia sincroni sia a induzione. La superiorità dei motori a c.a. rispetto a quelli a c.c. in termini di robustezza, rendimento e prestazioni per unità di peso, unita alla crescente convenienza e affidabilità degli invertitori a PWM e allo sviluppo di tecniche di controllo vettoriale che ottimizzano le prestazioni degli azionamenti a c.a., ha portato alla progressiva affermazione di questi ultimi, sia nel mercato degli azionamenti industriali sia in quello della trazione elettrica.
Altre applicazioni rilevanti degli invertitori sono nel campo del riscaldamento a induzione per trattamenti superficiali (per es., la tempra) o profondi (per es., la fusione) di pezzi metallici. In tal caso, l'invertitore alimenta un induttore entro il quale vengono disposti i pezzi da trattare, che vengono investiti da un campo magnetico variabile e divengono sede di correnti parassite che li scaldano per effetto Joule. Controllando la frequenza erogata dall'invertitore si controlla lo spessore di penetrazione del campo magnetico nei pezzi metallici e dunque lo spessore del trattamento termico: frequenze basse (da alcune decine di Hz) causano trattamenti profondi, frequenze elevate (fino a centinaia di kHz) corrispondono a trattamenti superficiali.
Gli invertitori costituiscono anche gli apparati fondamentali dei gruppi di continuità o UPS (Uninterruptible Power Supplies), ovvero sistemi in grado di garantire l'alimentazione di carichi prioritari (protetti) anche in caso di guasto o mancanza della rete pubblica. In tali sistemi la riserva di energia è fornita da una batteria di accumulatori, che fornisce la tensione di alimentazione a un invertitore cui sono allacciati i carichi protetti. In condizioni normali di funzionamento della rete le batterie vengono tenute in carica e l'invertitore preleva energia dalla rete e la trasferisce ai carichi. In condizioni di emergenza (guasto o assenza rete) l'invertitore preleva energia dal sistema di batterie e continua ad alimentare i carichi. Nel caso si prevedano mancanze di rete prolungate si può anche far ricorso a un gruppo elettrogeno, che assume le funzioni di sorgente primaria di energia.
Convertitori c.a./c.c. (raddrizzatori)

I convertitori c.a./c.c. più semplici e diffusi nelle applicazioni di piccola potenza sono quelli con carico capacitivo (v. motore, App. V). Quelli in uso nelle applicazioni di potenza più elevata (raddrizzatori con carico induttivo) sono derivabili dalla cella di fig. 3 estendendo il numero di ingressi di tensione. Ne risulta lo schema a stella mostrato in fig. 12a, dove gli interruttori T sono costituiti da SCR e alle cui porte d'ingresso è applicato un sistema polifase di tensioni, che si ipotizzano simmetriche. Gli SCR vengono posti in conduzione uno dopo l'altro, seguendo la sequenza naturale delle tensioni di alimentazione. La fig. 12b mostra le tensioni di alimentazione nel caso di convertitore esafase, mentre la fig. 12c mostra la tensione d'uscita ud in condizioni di commutazione naturale, quando cioè gli SCR vengono accesi non appena polarizzati positivamente (funzionamento come diodi); in tal caso ud segue l'andamento dei picchi positivi delle tensioni di alimentazione e la tensione media di uscita vale:
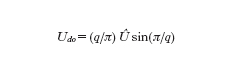
ove Û è il valore massimo delle tensioni stellate di alimentazione e q è il numero di fasi del convertitore.
Le figg. 12d, e, f mostrano la forma d'onda della tensione d'uscita ud quando l'accensione degli SCR viene ritardata di un angolo α (crescente) rispetto all'istante di commutazione naturale, realizzando un controllo di fase. La tensione media (filtrata) d'uscita in questo caso risulta:
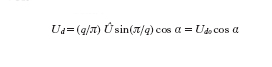
Poiché il ritardo α è regolabile nell'intervallo da 0 a π, ne consegue che la tensione media d'uscita è controllabile da +Udo a −Udo. Purtroppo questa semplicità di regolazione comporta dei difetti non trascurabili. Infatti, le correnti d'ingresso (ciascuna delle quali coincide con la corrente continua d'uscita id nell'intervallo di conduzione della corrispondente fase del convertitore) hanno un tipico andamento rettangolare e risultano fortemente deformate; inoltre, le loro componenti fondamentali risultano sfasate in ritardo di un angolo α rispetto alle tensioni di alimentazione. Il raddrizzatore a controllo di fase appare dunque alla rete come carico distorcente e reattivo variabile con α.
La fig. 13 mostra la configurazione del raddrizzatore trifase a ponte, che corrisponde al collegamento in serie di due convertitori a stella trifase ed è la più utilizzata nelle applicazioni, per i numerosi vantaggi che comporta. La tensione d'uscita del raddrizzatore a ponte trifase vale:

ove U è il valore efficace della tensione stellata di alimentazione e V è il valore efficace di quella concatenata.
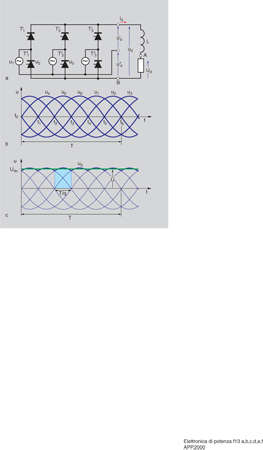
Si osservi che, in ambo gli schemi di raddrizzatore citati, la corrente d'uscita id è necessariamente positiva a causa dell'unidirezionalità degli SCR. I convertitori delle figg. 12a e 13a si dicono allora a 2 quadranti, poiché sono in grado di invertire la tensione, ma non la corrente del carico. Quando è necessario si possono tuttavia realizzare anche convertitori a 4 quadranti (convertitori bidirezionali) collegando due convertitori a 2 quadranti in parallelo inverso, secondo lo schema di principio di fig. 14, sicché uno (convertitore P) alimenta il carico quando questo richiede una corrente id positiva e l'altro (convertitore N) quando esso richiede una corrente negativa.
Negli schemi sopra illustrati gli SCR possono essere sostituiti da interruttori completamente controllati. Si realizzano così i raddrizzatori PWM con carico induttivo, che consentono un controllo molto più veloce e preciso della tensione d'uscita e delle correnti d'ingresso. Risulta in particolare possibile effettuare la regolazione della tensione d'uscita assorbendo dall'alimentazione correnti praticamente sinusoidali e in fase con le tensioni, superando così il principale difetto dei convertitori a controllo di fase.
Più frequentemente si utilizzano i raddrizzatori PWM con carico capacitivo, che non sono altro che invertitori con ingressi e uscite scambiati. Essi vengono alimentati da tensioni applicate ai morsetti a c.a. e forniscono energia a un carico a c.c. Anche in questo caso la modulazione PWM consente una regolazione accurata e pronta delle forme d'onda delle correnti assorbite dalla rete e della tensione d'uscita. La prontezza e precisione del controllo operato dai raddrizzatori PWM ne consente l'utilizzo anche come filtri attivi di potenza, cioè sistemi in grado di assorbire correnti armoniche e reattive opposte a quelle assorbite da altri carichi, che vengono così compensati.
Tra le applicazioni dei raddrizzatori, oltre ai già citati azionamenti a c.c., vanno menzionati i sistemi di trasmissione a c.c., in cui grandi potenze vengono trasferite a grande distanza in c.c., traendo beneficio dai minori costi della trasmissione in c.c. rispetto a quella in c.a. A tal fine, raddrizzatori di potenza adeguata vengono installati nelle stazioni terminali della linea in c.c. per interfacciare quest'ultima con le reti a c.a. Sistemi simili vengono anche utilizzati per la trasmissione sottomarina di potenza, come accade tra Italia e Corsica, o per la connessione tra sistemi in c.a. a frequenza diversa (50 Hz e 60 Hz), come accade in Giappone e tra Brasile e Paraguay.
Convertitori c.a./c.a.
Esistono sostanzialmente tre categorie di convertitori c.a./c.a.: i regolatori c.a., caratterizzati da una frequenza d'uscita fu eguale alla frequenza d'alimentazione fi; i cicloconvertitori, con fu〈fi; e i cicloinvertitori, con fu qualsiasi.
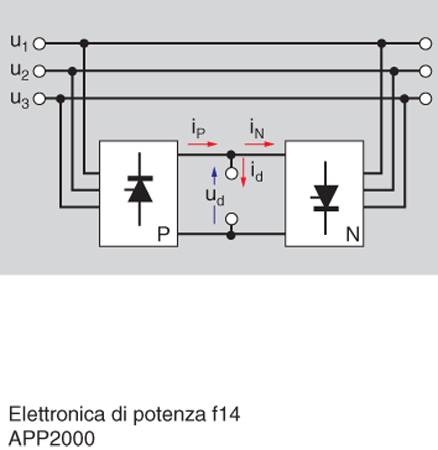
Lo schema monofase di un regolatore c.a. a controllo di fase è mostrato in fig. . Esso include un solo interruttore bidirezionale a TRIAC (per potenze elevate si usano due SCR in parallelo inverso), che viene acceso con ritardo α rispetto agli istanti di annullamento della tensione di alimentazione ui e si spegne a ogni passaggio per lo zero della corrente. La forma d'onda della corrente d'uscita iu nel semplice caso di carico resistivo è mostrata in fig. 15b. Il controllo della fase α, detto anche a parzializzazione, consente la regolazione del valore efficace della tensione d'uscita dal valore Ui di alimentazione (che si ottiene per α=0) fino a 0 (per α=π). Le figg. 15c e 15d mostrano gli andamenti di tensione e corrente di carico nel caso di carico R-L per diversi valori di α che, in questo caso, può essere regolato solo al di sopra dell'angolo di sfasamento ϕ caratteristico del carico (tg ϕ=ωL/R). Il regolatore è molto semplice, ma le forme d'onda della tensione d'uscita e della corrente sono fortemente distorte. Ciò limita l'uso di questo tipo di regolatori a quelle applicazioni di piccola potenza (regolazioni luminose e termiche e controlli di velocità di piccoli motori monofase) in cui il carico non è sensibile alla distorsione della tensione di alimentazione.
I cicloconvertitori altro non sono che convertitori bidirezionali in cui la tensione d'uscita viene fatta variare inseguendo un riferimento sinusoidale. Benché molto compatti (includono solo SCR) essi risultano abbastanza complessi (uno schema a doppio ponte con ingresso trifase e uscita monofase impiega 12 SCR, che diventano 36 nel caso di uscita trifase) e caratterizzati da forme d'onda d'ingresso e d'uscita assai distorte. Essi vengono utilizzati solo in settori particolari, quali alcuni grandi azionamenti a c.a. e le alimentazioni di bordo degli aeroplani, in cui la sorgente di energia è un alternatore calettato al motore dell'aereo. In quest'ultimo caso il cicloconvertitore, alimentato da tensioni di frequenza elevata, ma variabile, fornisce una tensione d'uscita di ampiezza e frequenza costante (400 Hz).
I cicloinvertitori sono suddivisibili in tre famiglie: i convertitori diretti, detti anche convertitori a matrice, quelli indiretti e quelli quasi diretti.
I convertitori diretti sono privi di elementi di accumulo energetico e vengono realizzati collegando un interruttore bidirezionale completamente controllato tra ciascuna fase d'ingresso e ciascuna d'uscita. La fig. 16 mostra lo schema con ingresso e uscita trifase, che utilizza 9 interruttori bidirezionali (detto a matrice). Il controllo avviene con tecniche PWM.
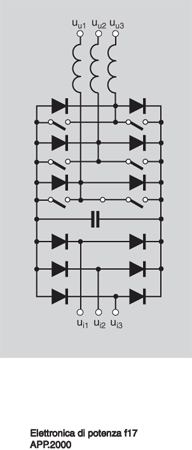
I convertitori indiretti si ottengono collegando in cascata un raddrizzatore, un elemento di accumulo energetico capacitivo, e un invertitore PWM a tensione impressa. Il raddrizzatore genera una tensione d'uscita che viene filtrata dall'elemento di accumulo energetico e alimenta l'invertitore, il quale produce in uscita la tensione di ampiezza e frequenza opportune. Lo schema trifase non reversibile, cioè senza possibilità di invertire il flusso della potenza, è mostrato in fig. 17. In questo caso lo stadio c.a./c.c. è costituito da un raddrizzatore a diodi.
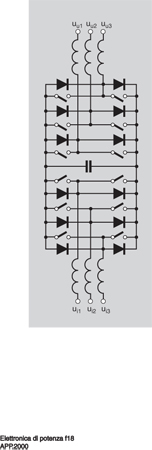
I convertitori quasi diretti hanno struttura affine a quella dei convertitori indiretti, però utilizzano raddrizzatori con controllo PWM; inoltre l'elemento di accumulo energetico è molto piccolo. Il raddrizzatore genera una tensione modulata ma priva di armoniche a bassa frequenza, sicché basta un piccolo filtro capacitivo per ottenere una tensione d'uscita continua. Quest'ultima alimenta l'invertitore, che fornisce in uscita la forma d'onda di tensione alternata richiesta. L'obiettivo è quello di minimizzare le dimensioni del filtro, il che si ottiene coordinando i sistemi di controllo dei due convertitori in modo da minimizzare le necessità di accumulo energetico. Ciò avviene realizzando i sistemi di controllo del raddrizzatore e dell'invertitore in modo che la potenza assorbita dalla rete di alimentazione dal raddrizzatore eguagli, in ogni istante, quella erogata al carico dall'invertitore. Lo schema di un convertitore quasi diretto trifase/trifase è mostrato in fig.18. Esso utilizza 12 interruttori unidirezionali completamente controllati con diodi di ricircolo. Le induttanze mostrate nelle figg. 17 e 18 servono a filtrare le correnti d'ingresso e d'uscita del convertitore.
Commutazione risonante
Tutti gli interruttori elettronici sono sedi di perdita di energia. Le perdite più significative si hanno in conduzione, poiché la caduta di tensione ai capi dei componenti non è mai trascurabile, e in commutazione, poiché durante la transizione da acceso a spento e viceversa il componente è soggetto simultaneamente a correnti e tensioni rilevanti, anche se per tempi limitati. Mentre la potenza perduta in conduzione risulta dipendente solo dalla corrente che fluisce nel componente, quella in commutazione risulta anche proporzionale alla tensione applicata al dispositivo e alla frequenza con cui esso viene commutato. La massima frequenza di operazione di un interruttore elettronico è dunque limitata dalle perdite di commutazione, che ne causano il riscaldamento. Per limitare tali perdite si può ricorrere a tecniche di commutazione risonante. Si utilizzano allo scopo circuiti risonanti, che vengono attivati in corrispondenza a ogni commutazione, e che provvedono, con le loro oscillazioni, a portare a zero la tensione o la corrente del dispositivo prima che questo venga comandato in chiusura o in apertura. A seconda della durata della fase risonante si distinguono i convertitori risonanti (in cui la fase risonante occupa l'intero periodo di operazione dell'interruttore), i convertitori quasi risonanti (in cui la risonanza occupa solo la fase di on oppure quella di off) e i convertitori a transizione risonante (in cui la risonanza occupa solo il tempo di transizione da on a off o viceversa).
Con l'uso della commutazione risonante le perdite di commutazione vengono assai ridotte; ciò consente di estendere il campo di frequenze di operazione degli interruttori e quindi di realizzare filtri e trasformatori più piccoli nonché convertitori più compatti ed economici.
Situazione del mercato
Il mercato mondiale dell'e. di p. è stato nel 1992 di circa 16.000 miliardi di lire, dei quali il 10% circa è costituito dai componenti, il 50% dal settore degli azionamenti per applicazioni industriali, il 35% dal settore degli azionamenti per applicazioni nei trasporti e la restante parte dal settore dell'e. di p. per le reti elettriche. Si assiste attualmente a una forte concentrazione industriale a livello mondiale, per cui, per es., nel campo degli azionamenti elettrici i 10 maggiori gruppi industriali detengono il 60% del mercato; tale concentrazione è ancora più alta nel settore dei trasporti, dove cinque aziende detengono da sole i 2/3 del mercato degli azionamenti. La caratteristica di tecnologia pervasiva dell'e. di p. fa sì che i relativi dati di mercato siano spesso oggetto di indagini parziali o, all'opposto, comprensive di altre tecnologie, quale, per es., l'automazione connessa agli azionamenti.
bibliografia
W. Leonhard, Regelung in der elektrischen Antriebstechnik, Stuttgart 1974; N. Mohan, T.M. Undeland, W.P. Robbins, Power electronics. Converters, applications, and design, New York 1989, 1995²; Power electronics and variable frequency drives, ed. B.K. Bose, Piscataway (N.J.) 1997.